 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Auto-tuning Framework for Autonomous Vehicles
Paper and Code
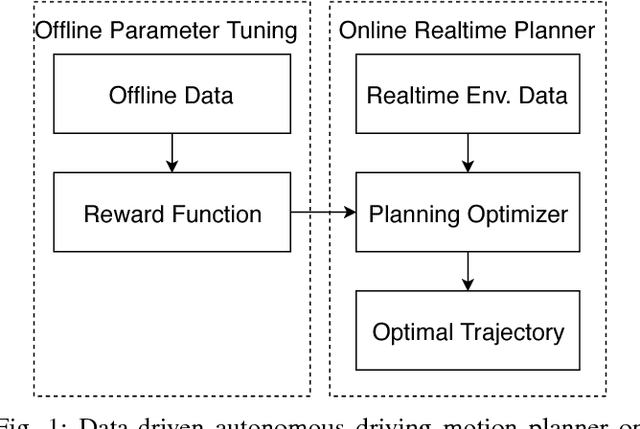
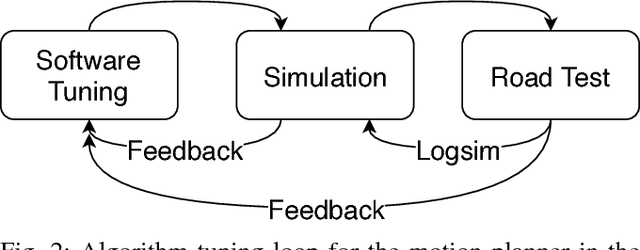
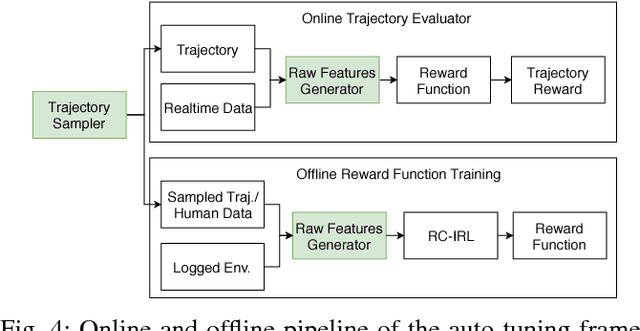
Many autonomous driving motion planners generate trajectories by optimizing a reward/cost functional. Designing and tuning a high-performance reward/cost functional for Level-4 autonomous driving vehicles with exposure to different driving conditions is challenging. Traditionally, reward/cost functional tuning involves substantial human effort and time spent on both simulations and road tests. As the scenario becomes more complicated, tuning to improve the motion planner performance becomes increasingly difficult. To systematically solve this issue, we develop a data-driven auto-tuning framework based on the Apollo autonomous driving framework. The framework includes a novel rank-based conditional inverse reinforcement learning algorithm, an offline training strategy and an automatic method of collecting and labeling data. Our auto-tuning framework has the following advantages that make it suitable for tuning an autonomous driving motion planner. First, compared to that of most inverse reinforcement learning algorithms, our algorithm training is efficient and capable of being applied to different scenarios. Second, the offline training strategy offers a safe way to adjust the parameters before public road testing. Third, the expert driving data and information about the surrounding environment are collected and automatically labeled, which considerably reduces the manual effort. Finally, the motion planner tuned by the framework is examined via both simulation and public road testing and is shown to achieve good performance.