 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenAI GPT-5 System Card
Dec 19, 2025This is the system card published alongside the OpenAI GPT-5 launch, August 2025. GPT-5 is a unified system with a smart and fast model that answers most questions, a deeper reasoning model for harder problems, and a real-time router that quickly decides which model to use based on conversation type, complexity, tool needs, and explicit intent (for example, if you say 'think hard about this' in the prompt). The router is continuously trained on real signals, including when users switch models, preference rates for responses, and measured correctness, improving over time. Once usage limits are reached, a mini version of each model handles remaining queries. This system card focuses primarily on gpt-5-thinking and gpt-5-main, while evaluations for other models are available in the appendix. The GPT-5 system not only outperforms previous models on benchmarks and answers questions more quickly, but -- more importantly -- is more useful for real-world queries. We've made significant advances in reducing hallucinations, improving instruction following, and minimizing sycophancy, and have leveled up GPT-5's performance in three of ChatGPT's most common uses: writing, coding, and health. All of the GPT-5 models additionally feature safe-completions, our latest approach to safety training to prevent disallowed content. Similarly to ChatGPT agent, we have decided to treat gpt-5-thinking as High capability in the Biological and Chemical domain under our Preparedness Framework, activating the associated safeguards. While we do not have definitive evidence that this model could meaningfully help a novice to create severe biological harm -- our defined threshold for High capability -- we have chosen to take a precautionary approach.
OpenAI o1 System Card
Dec 21, 2024



The o1 model series is trained with large-scale reinforcement learning to reason using chain of thought. These advanced reasoning capabilities provide new avenues for improving the safety and robustness of our models. In particular, our models can reason about our safety policies in context when responding to potentially unsafe prompts, through deliberative alignment. This leads to state-of-the-art performance on certain benchmarks for risks such as generating illicit advice, choosing stereotyped responses, and succumbing to known jailbreaks. Training models to incorporate a chain of thought before answering has the potential to unlock substantial benefits, while also increasing potential risks that stem from heightened intelligence. Our results underscore the need for building robust alignment methods, extensively stress-testing their efficacy, and maintaining meticulous risk management protocols. This report outlines the safety work carried out for the OpenAI o1 and OpenAI o1-mini models, including safety evaluations, external red teaming, and Preparedness Framework evaluations.
The Update Equivalence Framework for Decision-Time Planning
Apr 25, 2023



The process of revising (or constructing) a policy immediately prior to execution -- known as decision-time planning -- is key to achieving superhuman performance in perfect-information settings like chess and Go. A recent line of work has extended decision-time planning to more general imperfect-information settings, leading to superhuman performance in poker. However, these methods requires considering subgames whose sizes grow quickly in the amount of non-public information, making them unhelpful when the amount of non-public information is large. Motivated by this issue, we introduce an alternative framework for decision-time planning that is not based on subgames but rather on the notion of update equivalence. In this framework, decision-time planning algorithms simulate updates of synchronous learning algorithms. This framework enables us to introduce a new family of principled decision-time planning algorithms that do not rely on public information, opening the door to sound and effective decision-time planning in settings with large amounts of non-public information. In experiments, members of this family produce comparable or superior results compared to state-of-the-art approaches in Hanabi and improve performance in 3x3 Abrupt Dark Hex and Phantom Tic-Tac-Toe.
Abstracting Imperfect Information Away from Two-Player Zero-Sum Games
Jan 22, 2023



In their seminal work, Nayyar et al. (2013) showed that imperfect information can be abstracted away from common-payoff games by having players publicly announce their policies as they play. This insight underpins sound solvers and decision-time planning algorithms for common-payoff games. Unfortunately, a naive application of the same insight to two-player zero-sum games fails because Nash equilibria of the game with public policy announcements may not correspond to Nash equilibria of the original game. As a consequence, existing sound decision-time planning algorithms require complicated additional mechanisms that have unappealing properties. The main contribution of this work is showing that certain regularized equilibria do not possess the aforementioned non-correspondence problem -- thus, computing them can be treated as perfect information problems. Because these regularized equilibria can be made arbitrarily close to Nash equilibria, our result opens the door to a new perspective on solving two-player zero-sum games and, in particular, yields a simplified framework for decision-time planning in two-player zero-sum games, void of the unappealing properties that plague existing decision-time planning approaches.
Human-AI Coordination via Human-Regularized Search and Learning
Oct 11, 2022
We consider the problem of making AI agents that collaborate well with humans in partially observable fully cooperative environments given datasets of human behavior. Inspired by piKL, a human-data-regularized search method that improves upon a behavioral cloning policy without diverging far away from it, we develop a three-step algorithm that achieve strong performance in coordinating with real humans in the Hanabi benchmark. We first use a regularized search algorithm and behavioral cloning to produce a better human model that captures diverse skill levels. Then, we integrate the policy regularization idea into reinforcement learning to train a human-like best response to the human model. Finally, we apply regularized search on top of the best response policy at test time to handle out-of-distribution challenges when playing with humans. We evaluate our method in two large scale experiments with humans. First, we show that our method outperforms experts when playing with a group of diverse human players in ad-hoc teams. Second, we show that our method beats a vanilla best response to behavioral cloning baseline by having experts play repeatedly with the two agents.
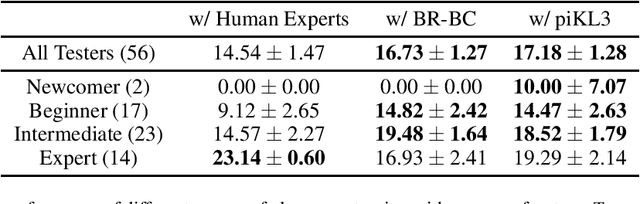
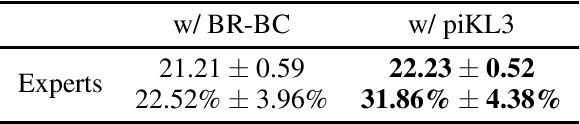
Mastering the Game of No-Press Diplomacy via Human-Regularized Reinforcement Learning and Planning
Oct 11, 2022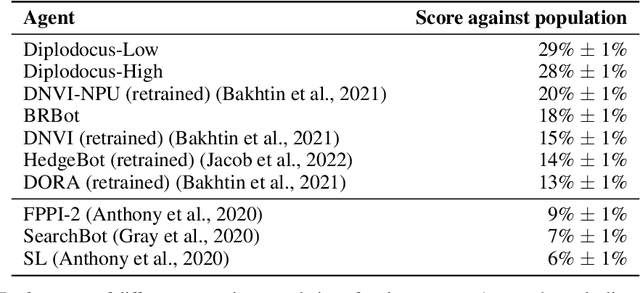
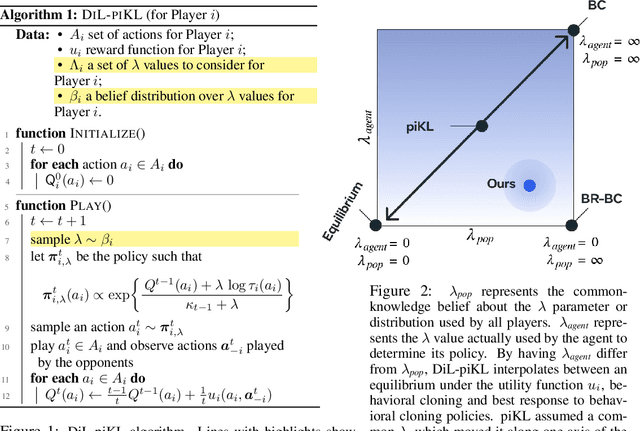
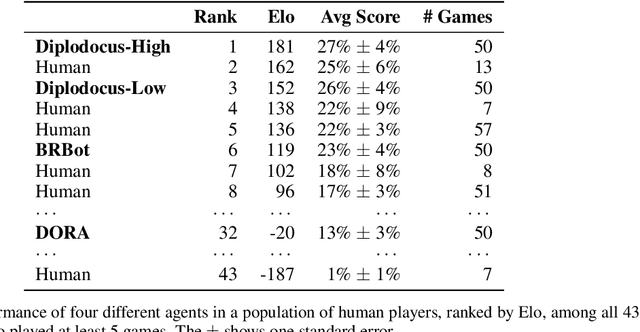
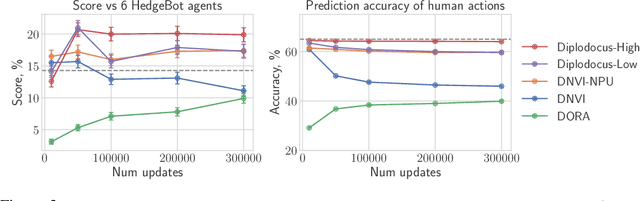
No-press Diplomacy is a complex strategy game involving both cooperation and competition that has served as a benchmark for multi-agent AI research. While self-play reinforcement learning has resulted in numerous successes in purely adversarial games like chess, Go, and poker, self-play alone is insufficient for achieving optimal performance in domains involving cooperation with humans. We address this shortcoming by first introducing a planning algorithm we call DiL-piKL that regularizes a reward-maximizing policy toward a human imitation-learned policy. We prove that this is a no-regret learning algorithm under a modified utility function. We then show that DiL-piKL can be extended into a self-play reinforcement learning algorithm we call RL-DiL-piKL that provides a model of human play while simultaneously training an agent that responds well to this human model. We used RL-DiL-piKL to train an agent we name Diplodocus. In a 200-game no-press Diplomacy tournament involving 62 human participants spanning skill levels from beginner to expert, two Diplodocus agents both achieved a higher average score than all other participants who played more than two games, and ranked first and third according to an Elo ratings model.
A Unified Approach to Reinforcement Learning, Quantal Response Equilibria, and Two-Player Zero-Sum Games
Jun 12, 2022
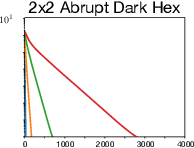

Algorithms designed for single-agent reinforcement learning (RL) generally fail to converge to equilibria in two-player zero-sum (2p0s) games. Conversely, game-theoretic algorithms for approximating Nash and quantal response equilibria (QREs) in 2p0s games are not typically competitive for RL and can be difficult to scale. As a result, algorithms for these two cases are generally developed and evaluated separately. In this work, we show that a single algorithm -- a simple extension to mirror descent with proximal regularization that we call magnetic mirror descent (MMD) -- can produce strong results in both settings, despite their fundamental differences. From a theoretical standpoint, we prove that MMD converges linearly to QREs in extensive-form games -- this is the first time linear convergence has been proven for a first order solver. Moreover, applied as a tabular Nash equilibrium solver via self-play, we show empirically that MMD produces results competitive with CFR in both normal-form and extensive-form games with full feedback (this is the first time that a standard RL algorithm has done so) and also that MMD empirically converges in black-box feedback settings. Furthermore, for single-agent deep RL, on a small collection of Atari and Mujoco games, we show that MMD can produce results competitive with those of PPO. Lastly, for multi-agent deep RL, we show MMD can outperform NFSP in 3x3 Abrupt Dark Hex.
Modeling Strong and Human-Like Gameplay with KL-Regularized Search
Dec 14, 2021

We consider the task of building strong but human-like policies in multi-agent decision-making problems, given examples of human behavior. Imitation learning is effective at predicting human actions but may not match the strength of expert humans, while self-play learning and search techniques (e.g. AlphaZero) lead to strong performance but may produce policies that are difficult for humans to understand and coordinate with. We show in chess and Go that regularizing search policies based on the KL divergence from an imitation-learned policy by applying Monte Carlo tree search produces policies that have higher human prediction accuracy and are stronger than the imitation policy. We then introduce a novel regret minimization algorithm that is regularized based on the KL divergence from an imitation-learned policy, and show that applying this algorithm to no-press Diplomacy yields a policy that maintains the same human prediction accuracy as imitation learning while being substantially stronger.
No-Press Diplomacy from Scratch
Oct 06, 2021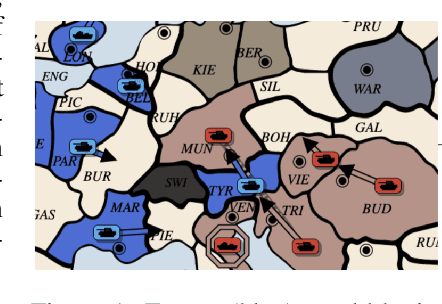

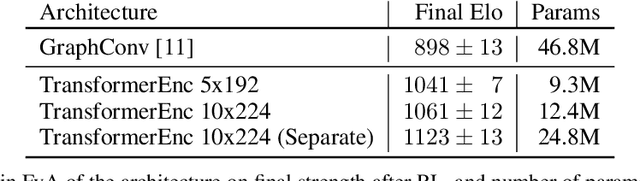
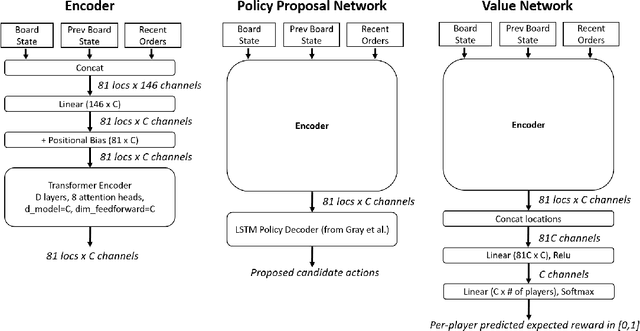
Prior AI successes in complex games have largely focused on settings with at most hundreds of actions at each decision point. In contrast, Diplomacy is a game with more than 10^20 possible actions per turn. Previous attempts to address games with large branching factors, such as Diplomacy, StarCraft, and Dota, used human data to bootstrap the policy or used handcrafted reward shaping. In this paper, we describe an algorithm for action exploration and equilibrium approximation in games with combinatorial action spaces. This algorithm simultaneously performs value iteration while learning a policy proposal network. A double oracle step is used to explore additional actions to add to the policy proposals. At each state, the target state value and policy for the model training are computed via an equilibrium search procedure. Using this algorithm, we train an agent, DORA, completely from scratch for a popular two-player variant of Diplomacy and show that it achieves superhuman performance. Additionally, we extend our methods to full-scale no-press Diplomacy and for the first time train an agent from scratch with no human data. We present evidence that this agent plays a strategy that is incompatible with human-data bootstrapped agents. This presents the first strong evidence of multiple equilibria in Diplomacy and suggests that self play alone may be insufficient for achieving superhuman performance in Diplomacy.
Scalable Online Planning via Reinforcement Learning Fine-Tuning
Sep 30, 2021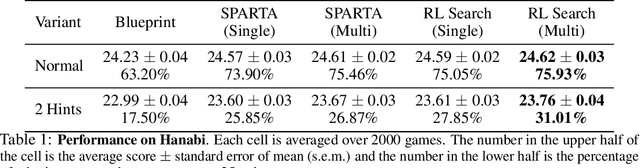
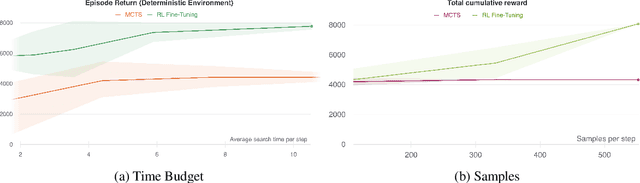
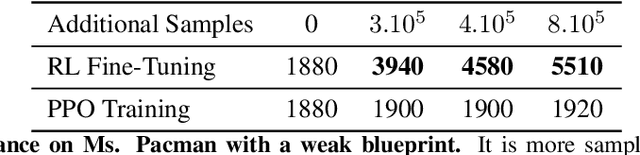
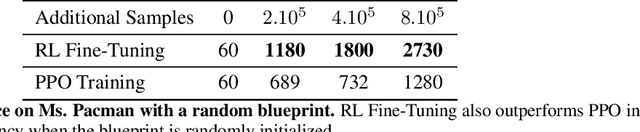
Lookahead search has been a critical component of recent AI successes, such as in the games of chess, go, and poker. However, the search methods used in these games, and in many other settings, are tabular. Tabular search methods do not scale well with the size of the search space, and this problem is exacerbated by stochasticity and partial observability. In this work we replace tabular search with online model-based fine-tuning of a policy neural network via reinforcement learning, and show that this approach outperforms state-of-the-art search algorithms in benchmark settings. In particular, we use our search algorithm to achieve a new state-of-the-art result in self-play Hanabi, and show the generality of our algorithm by also showing that it outperforms tabular search in the Atari game Ms. Pacman.