 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Dual Mechanisms of Spatial Reasoning in Vision-Language Models
Mar 23, 2026Many multimodal tasks, such as image captioning and visual question answering, require vision-language models (VLMs) to associate objects with their properties and spatial relations. Yet it remains unclear where and how such associations are computed within VLMs. In this work, we show that VLMs rely on two concurrent mechanisms to represent such associations. In the language model backbone, intermediate layers represent content-independent spatial relations on top of visual tokens corresponding to objects. However, this mechanism plays only a secondary role in shaping model predictions. Instead, the dominant source of spatial information originates in the vision encoder, whose representations encode the layout of objects and are directly exploited by the language model backbone. Notably, this spatial signal is distributed globally across visual tokens, extending beyond object regions into surrounding background areas. We show that enhancing these vision-derived spatial representations globally across all image tokens improves spatial reasoning performance on naturalistic images. Together, our results clarify how spatial association is computed within VLMs and highlight the central role of vision encoders in enabling spatial reasoning.
Pitfalls in Evaluating Interpretability Agents
Mar 20, 2026Automated interpretability systems aim to reduce the need for human labor and scale analysis to increasingly large models and diverse tasks. Recent efforts toward this goal leverage large language models (LLMs) at increasing levels of autonomy, ranging from fixed one-shot workflows to fully autonomous interpretability agents. This shift creates a corresponding need to scale evaluation approaches to keep pace with both the volume and complexity of generated explanations. We investigate this challenge in the context of automated circuit analysis -- explaining the roles of model components when performing specific tasks. To this end, we build an agentic system in which a research agent iteratively designs experiments and refines hypotheses. When evaluated against human expert explanations across six circuit analysis tasks in the literature, the system appears competitive. However, closer examination reveals several pitfalls of replication-based evaluation: human expert explanations can be subjective or incomplete, outcome-based comparisons obscure the research process, and LLM-based systems may reproduce published findings via memorization or informed guessing. To address some of these pitfalls, we propose an unsupervised intrinsic evaluation based on the functional interchangeability of model components. Our work demonstrates fundamental challenges in evaluating complex automated interpretability systems and reveals key limitations of replication-based evaluation.
Agents of Chaos
Feb 23, 2026We report an exploratory red-teaming study of autonomous language-model-powered agents deployed in a live laboratory environment with persistent memory, email accounts, Discord access, file systems, and shell execution. Over a two-week period, twenty AI researchers interacted with the agents under benign and adversarial conditions. Focusing on failures emerging from the integration of language models with autonomy, tool use, and multi-party communication, we document eleven representative case studies. Observed behaviors include unauthorized compliance with non-owners, disclosure of sensitive information, execution of destructive system-level actions, denial-of-service conditions, uncontrolled resource consumption, identity spoofing vulnerabilities, cross-agent propagation of unsafe practices, and partial system takeover. In several cases, agents reported task completion while the underlying system state contradicted those reports. We also report on some of the failed attempts. Our findings establish the existence of security-, privacy-, and governance-relevant vulnerabilities in realistic deployment settings. These behaviors raise unresolved questions regarding accountability, delegated authority, and responsibility for downstream harms, and warrant urgent attention from legal scholars, policymakers, and researchers across disciplines. This report serves as an initial empirical contribution to that broader conversation.
Constructive Circuit Amplification: Improving Math Reasoning in LLMs via Targeted Sub-Network Updates
Dec 18, 2025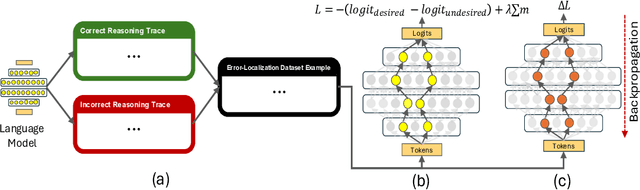
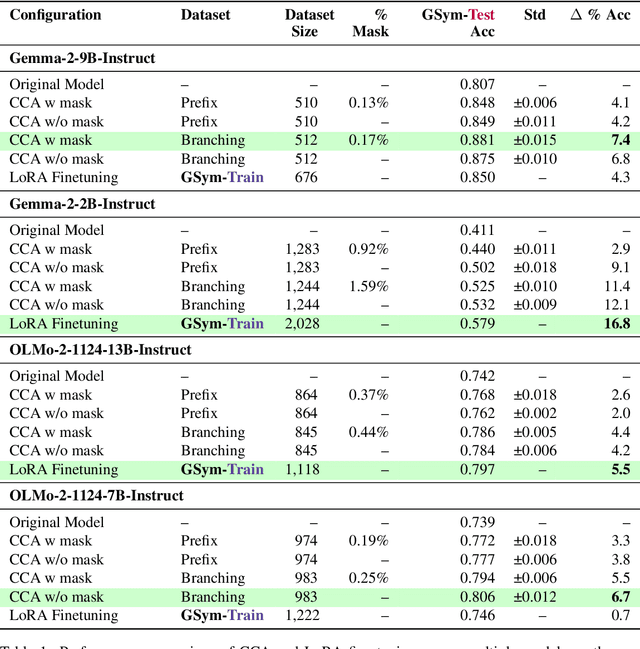
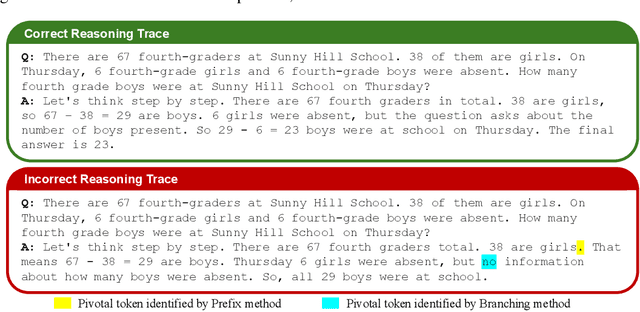
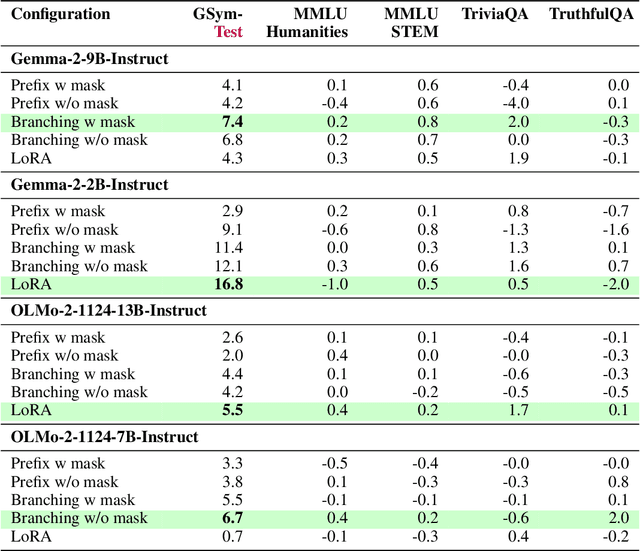
Prior studies investigating the internal workings of LLMs have uncovered sparse subnetworks, often referred to as circuits, that are responsible for performing specific tasks. Additionally, it has been shown that model performance improvement through fine-tuning often results from the strengthening of existing circuits in the model. Taken together, these findings suggest the possibility of intervening directly on such circuits to make precise, task-targeted updates. Motivated by these findings, we propose a novel method called Constructive Circuit Amplification which identifies pivotal tokens from model reasoning traces as well as model components responsible for the desired task, and updates only those components. Applied to mathematical reasoning, it improves accuracy by up to +11.4% across multiple models while modifying as little as 1.59% of model components, with minimal impact on other abilities as measured by MMLU, TriviaQA, and TruthfulQA. These results demonstrate that targeted capabilities can be reliably enhanced by selectively updating a sparse set of model components.
Language Models use Lookbacks to Track Beliefs
May 20, 2025How do language models (LMs) represent characters' beliefs, especially when those beliefs may differ from reality? This question lies at the heart of understanding the Theory of Mind (ToM) capabilities of LMs. We analyze Llama-3-70B-Instruct's ability to reason about characters' beliefs using causal mediation and abstraction. We construct a dataset that consists of simple stories where two characters each separately change the state of two objects, potentially unaware of each other's actions. Our investigation uncovered a pervasive algorithmic pattern that we call a lookback mechanism, which enables the LM to recall important information when it becomes necessary. The LM binds each character-object-state triple together by co-locating reference information about them, represented as their Ordering IDs (OIs) in low rank subspaces of the state token's residual stream. When asked about a character's beliefs regarding the state of an object, the binding lookback retrieves the corresponding state OI and then an answer lookback retrieves the state token. When we introduce text specifying that one character is (not) visible to the other, we find that the LM first generates a visibility ID encoding the relation between the observing and the observed character OIs. In a visibility lookback, this ID is used to retrieve information about the observed character and update the observing character's beliefs. Our work provides insights into the LM's belief tracking mechanisms, taking a step toward reverse-engineering ToM reasoning in LMs.
MIB: A Mechanistic Interpretability Benchmark
Apr 17, 2025



How can we know whether new mechanistic interpretability methods achieve real improvements? In pursuit of meaningful and lasting evaluation standards, we propose MIB, a benchmark with two tracks spanning four tasks and five models. MIB favors methods that precisely and concisely recover relevant causal pathways or specific causal variables in neural language models. The circuit localization track compares methods that locate the model components - and connections between them - most important for performing a task (e.g., attribution patching or information flow routes). The causal variable localization track compares methods that featurize a hidden vector, e.g., sparse autoencoders (SAEs) or distributed alignment search (DAS), and locate model features for a causal variable relevant to the task. Using MIB, we find that attribution and mask optimization methods perform best on circuit localization. For causal variable localization, we find that the supervised DAS method performs best, while SAE features are not better than neurons, i.e., standard dimensions of hidden vectors. These findings illustrate that MIB enables meaningful comparisons of methods, and increases our confidence that there has been real progress in the field.
The Quest for the Right Mediator: A History, Survey, and Theoretical Grounding of Causal Interpretability
Aug 02, 2024


Interpretability provides a toolset for understanding how and why neural networks behave in certain ways. However, there is little unity in the field: most studies employ ad-hoc evaluations and do not share theoretical foundations, making it difficult to measure progress and compare the pros and cons of different techniques. Furthermore, while mechanistic understanding is frequently discussed, the basic causal units underlying these mechanisms are often not explicitly defined. In this paper, we propose a perspective on interpretability research grounded in causal mediation analysis. Specifically, we describe the history and current state of interpretability taxonomized according to the types of causal units (mediators) employed, as well as methods used to search over mediators. We discuss the pros and cons of each mediator, providing insights as to when particular kinds of mediators and search methods are most appropriate depending on the goals of a given study. We argue that this framing yields a more cohesive narrative of the field, as well as actionable insights for future work. Specifically, we recommend a focus on discovering new mediators with better trade-offs between human-interpretability and compute-efficiency, and which can uncover more sophisticated abstractions from neural networks than the primarily linear mediators employed in current work. We also argue for more standardized evaluations that enable principled comparisons across mediator types, such that we can better understand when particular causal units are better suited to particular use cases.
NNsight and NDIF: Democratizing Access to Foundation Model Internals
Jul 18, 2024



The enormous scale of state-of-the-art foundation models has limited their accessibility to scientists, because customized experiments at large model sizes require costly hardware and complex engineering that is impractical for most researchers. To alleviate these problems, we introduce NNsight, an open-source Python package with a simple, flexible API that can express interventions on any PyTorch model by building computation graphs. We also introduce NDIF, a collaborative research platform providing researchers access to foundation-scale LLMs via the NNsight API. Code, documentation, and tutorials are available at https://www.nnsight.net.
Fine-Tuning Enhances Existing Mechanisms: A Case Study on Entity Tracking
Feb 22, 2024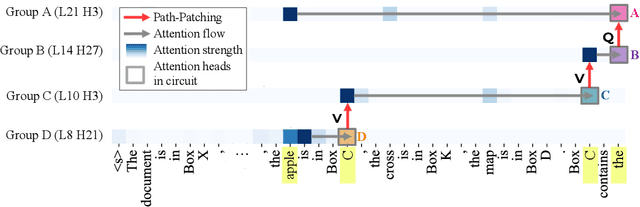

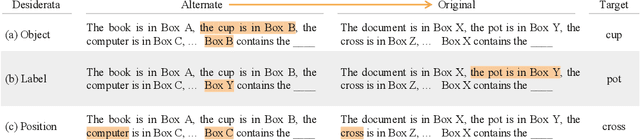
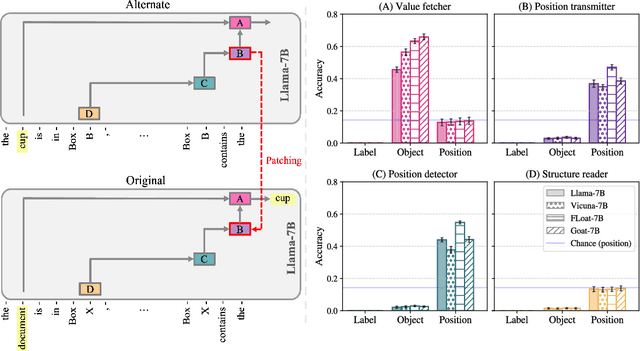
Fine-tuning on generalized tasks such as instruction following, code generation, and mathematics has been shown to enhance language models' performance on a range of tasks. Nevertheless, explanations of how such fine-tuning influences the internal computations in these models remain elusive. We study how fine-tuning affects the internal mechanisms implemented in language models. As a case study, we explore the property of entity tracking, a crucial facet of language comprehension, where models fine-tuned on mathematics have substantial performance gains. We identify the mechanism that enables entity tracking and show that (i) in both the original model and its fine-tuned versions primarily the same circuit implements entity tracking. In fact, the entity tracking circuit of the original model on the fine-tuned versions performs better than the full original model. (ii) The circuits of all the models implement roughly the same functionality: Entity tracking is performed by tracking the position of the correct entity in both the original model and its fine-tuned versions. (iii) Performance boost in the fine-tuned models is primarily attributed to its improved ability to handle the augmented positional information. To uncover these findings, we employ: Patch Patching, DCM, which automatically detects model components responsible for specific semantics, and CMAP, a new approach for patching activations across models to reveal improved mechanisms. Our findings suggest that fine-tuning enhances, rather than fundamentally alters, the mechanistic operation of the model.
Denoising Heat-inspired Diffusion with Insulators for Collision Free Motion Planning
Oct 19, 2023



Diffusion models have risen as a powerful tool in robotics due to their flexibility and multi-modality. While some of these methods effectively address complex problems, they often depend heavily on inference-time obstacle detection and require additional equipment. Addressing these challenges, we present a method that, during inference time, simultaneously generates only reachable goals and plans motions that avoid obstacles, all from a single visual input. Central to our approach is the novel use of a collision-avoiding diffusion kernel for training. Through evaluations against behavior-cloning and classical diffusion models, our framework has proven its robustness. It is particularly effective in multi-modal environments, navigating toward goals and avoiding unreachable ones blocked by obstacles, while ensuring collision avoidance.