 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGroup-Invariant Unsupervised Skill Discovery: Symmetry-aware Skill Representations for Generalizable Behavior
Jan 20, 2026Unsupervised skill discovery aims to acquire behavior primitives that improve exploration and accelerate downstream task learning. However, existing approaches often ignore the geometric symmetries of physical environments, leading to redundant behaviors and sample inefficiency. To address this, we introduce Group-Invariant Skill Discovery (GISD), a framework that explicitly embeds group structure into the skill discovery objective. Our approach is grounded in a theoretical guarantee: we prove that in group-symmetric environments, the standard Wasserstein dependency measure admits a globally optimal solution comprised of an equivariant policy and a group-invariant scoring function. Motivated by this, we formulate the Group-Invariant Wasserstein dependency measure, which restricts the optimization to this symmetry-aware subspace without loss of optimality. Practically, we parameterize the scoring function using a group Fourier representation and define the intrinsic reward via the alignment of equivariant latent features, ensuring that the discovered skills generalize systematically under group transformations. Experiments on state-based and pixel-based locomotion benchmarks demonstrate that GISD achieves broader state-space coverage and improved efficiency in downstream task learning compared to a strong baseline.
Multi-Robot Motion Planning from Vision and Language using Heat-Inspired Diffusion
Dec 15, 2025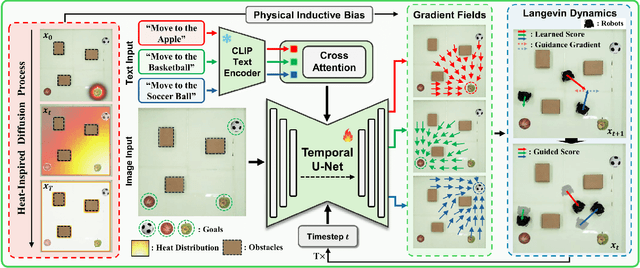
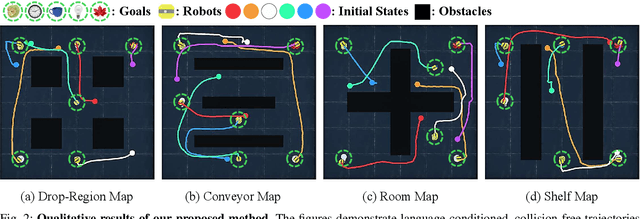
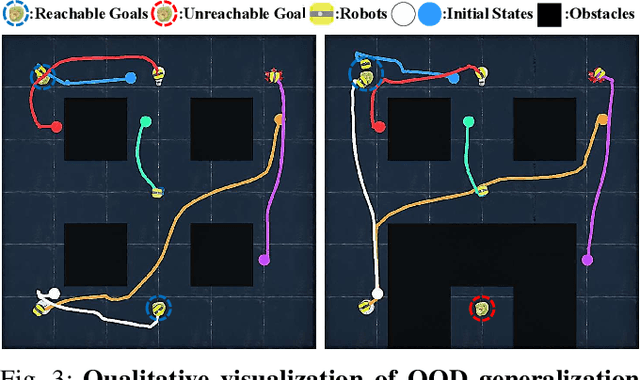
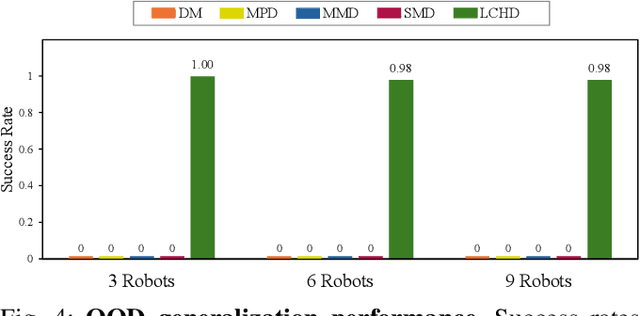
Diffusion models have recently emerged as powerful tools for robot motion planning by capturing the multi-modal distribution of feasible trajectories. However, their extension to multi-robot settings with flexible, language-conditioned task specifications remains limited. Furthermore, current diffusion-based approaches incur high computational cost during inference and struggle with generalization because they require explicit construction of environment representations and lack mechanisms for reasoning about geometric reachability. To address these limitations, we present Language-Conditioned Heat-Inspired Diffusion (LCHD), an end-to-end vision-based framework that generates language-conditioned, collision-free trajectories. LCHD integrates CLIP-based semantic priors with a collision-avoiding diffusion kernel serving as a physical inductive bias that enables the planner to interpret language commands strictly within the reachable workspace. This naturally handles out-of-distribution scenarios -- in terms of reachability -- by guiding robots toward accessible alternatives that match the semantic intent, while eliminating the need for explicit obstacle information at inference time. Extensive evaluations on diverse real-world-inspired maps, along with real-robot experiments, show that LCHD consistently outperforms prior diffusion-based planners in success rate, while reducing planning latency.
Symmetry-Aware Steering of Equivariant Diffusion Policies: Benefits and Limits
Dec 12, 2025Equivariant diffusion policies (EDPs) combine the generative expressivity of diffusion models with the strong generalization and sample efficiency afforded by geometric symmetries. While steering these policies with reinforcement learning (RL) offers a promising mechanism for fine-tuning beyond demonstration data, directly applying standard (non-equivariant) RL can be sample-inefficient and unstable, as it ignores the symmetries that EDPs are designed to exploit. In this paper, we theoretically establish that the diffusion process of an EDP is equivariant, which in turn induces a group-invariant latent-noise MDP that is well-suited for equivariant diffusion steering. Building on this theory, we introduce a principled symmetry-aware steering framework and compare standard, equivariant, and approximately equivariant RL strategies through comprehensive experiments across tasks with varying degrees of symmetry. While we identify the practical boundaries of strict equivariance under symmetry breaking, we show that exploiting symmetry during the steering process yields substantial benefits-enhancing sample efficiency, preventing value divergence, and achieving strong policy improvements even when EDPs are trained from extremely limited demonstrations.
Geometric Formulation of Unified Force-Impedance Control on SE(3) for Robotic Manipulators
Apr 23, 2025



In this paper, we present an impedance control framework on the SE(3) manifold, which enables force tracking while guaranteeing passivity. Building upon the unified force-impedance control (UFIC) and our previous work on geometric impedance control (GIC), we develop the geometric unified force impedance control (GUFIC) to account for the SE(3) manifold structure in the controller formulation using a differential geometric perspective. As in the case of the UFIC, the GUFIC utilizes energy tank augmentation for both force-tracking and impedance control to guarantee the manipulator's passivity relative to external forces. This ensures that the end effector maintains safe contact interaction with uncertain environments and tracks a desired interaction force. Moreover, we resolve a non-causal implementation problem in the UFIC formulation by introducing velocity and force fields. Due to its formulation on SE(3), the proposed GUFIC inherits the desirable SE(3) invariance and equivariance properties of the GIC, which helps increase sample efficiency in machine learning applications where a learning algorithm is incorporated into the control law. The proposed control law is validated in a simulation environment under scenarios requiring tracking an SE(3) trajectory, incorporating both position and orientation, while exerting a force on a surface. The codes are available at https://github.com/Joohwan-Seo/GUFIC_mujoco.
A Comparison Between Lie Group- and Lie Algebra- Based Potential Functions for Geometric Impedance Control
Jan 24, 2024



In this paper, a comparison analysis between geometric impedance controls (GICs) derived from two different potential functions on SE(3) for robotic manipulators is presented. The first potential function is defined on the Lie group, utilizing the Frobenius norm of the configuration error matrix. The second potential function is defined utilizing the Lie algebra, i.e., log-map of the configuration error. Using a differential geometric approach, the detailed derivation of the distance metric and potential function on SE(3) is introduced. The GIC laws are respectively derived from the two potential functions, followed by extensive comparison analyses. In the qualitative analysis, the properties of the error function and control laws are analyzed, while the performances of the controllers are quantitatively compared using numerical simulation.
AdvMT: Adversarial Motion Transformer for Long-term Human Motion Prediction
Jan 10, 2024To achieve seamless collaboration between robots and humans in a shared environment, accurately predicting future human movements is essential. Human motion prediction has traditionally been approached as a sequence prediction problem, leveraging historical human motion data to estimate future poses. Beginning with vanilla recurrent networks, the research community has investigated a variety of methods for learning human motion dynamics, encompassing graph-based and generative approaches. Despite these efforts, achieving accurate long-term predictions continues to be a significant challenge. In this regard, we present the Adversarial Motion Transformer (AdvMT), a novel model that integrates a transformer-based motion encoder and a temporal continuity discriminator. This combination effectively captures spatial and temporal dependencies simultaneously within frames. With adversarial training, our method effectively reduces the unwanted artifacts in predictions, thereby ensuring the learning of more realistic and fluid human motions. The evaluation results indicate that AdvMT greatly enhances the accuracy of long-term predictions while also delivering robust short-term predictions
Clustering Techniques for Stable Linear Dynamical Systems with applications to Hard Disk Drives
Nov 17, 2023



In Robust Control and Data Driven Robust Control design methodologies, multiple plant transfer functions or a family of transfer functions are considered and a common controller is designed such that all the plants that fall into this family are stabilized. Though the plants are stabilized, the controller might be sub-optimal for each of the plants when the variations in the plants are large. This paper presents a way of clustering stable linear dynamical systems for the design of robust controllers within each of the clusters such that the controllers are optimal for each of the clusters. First a k-medoids algorithm for hard clustering will be presented for stable Linear Time Invariant (LTI) systems and then a Gaussian Mixture Models (GMM) clustering for a special class of LTI systems, common for Hard Disk Drive plants, will be presented.
Denoising Heat-inspired Diffusion with Insulators for Collision Free Motion Planning
Oct 19, 2023



Diffusion models have risen as a powerful tool in robotics due to their flexibility and multi-modality. While some of these methods effectively address complex problems, they often depend heavily on inference-time obstacle detection and require additional equipment. Addressing these challenges, we present a method that, during inference time, simultaneously generates only reachable goals and plans motions that avoid obstacles, all from a single visual input. Central to our approach is the novel use of a collision-avoiding diffusion kernel for training. Through evaluations against behavior-cloning and classical diffusion models, our framework has proven its robustness. It is particularly effective in multi-modal environments, navigating toward goals and avoiding unreachable ones blocked by obstacles, while ensuring collision avoidance.
Diffusion-EDFs: Bi-equivariant Denoising Generative Modeling on SE(3) for Visual Robotic Manipulation
Sep 07, 2023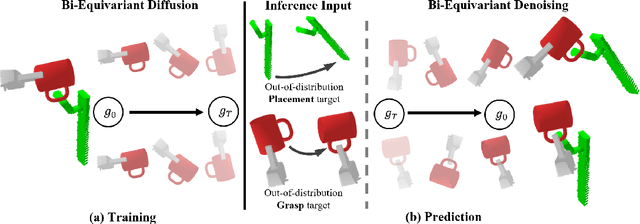



Recent studies have verified that equivariant methods can significantly improve the data efficiency, generalizability, and robustness in robot learning. Meanwhile, denoising diffusion-based generative modeling has recently gained significant attention as a promising approach for robotic manipulation learning from demonstrations with stochastic behaviors. In this paper, we present Diffusion-EDFs, a novel approach that incorporates spatial roto-translation equivariance, i.e., SE(3)-equivariance to diffusion generative modeling. By integrating SE(3)-equivariance into our model architectures, we demonstrate that our proposed method exhibits remarkable data efficiency, requiring only 5 to 10 task demonstrations for effective end-to-end training. Furthermore, our approach showcases superior generalizability compared to previous diffusion-based manipulation methods.
Robot Manipulation Task Learning by Leveraging SE(3) Group Invariance and Equivariance
Aug 29, 2023



This paper presents a differential geometric control approach that leverages SE(3) group invariance and equivariance to increase transferability in learning robot manipulation tasks that involve interaction with the environment. Specifically, we employ a control law and a learning representation framework that remain invariant under arbitrary SE(3) transformations of the manipulation task definition. Furthermore, the control law and learning representation framework are shown to be SE(3) equivariant when represented relative to the spatial frame. The proposed approach is based on utilizing a recently presented geometric impedance control (GIC) combined with a learning variable impedance control framework, where the gain scheduling policy is trained in a supervised learning fashion from expert demonstrations. A geometrically consistent error vector (GCEV) is fed to a neural network to achieve a gain scheduling policy that remains invariant to arbitrary translation and rotations. A comparison of our proposed control and learning framework with a well-known Cartesian space learning impedance control, equipped with a Cartesian error vector-based gain scheduling policy, confirms the significantly superior learning transferability of our proposed approach. A hardware implementation on a peg-in-hole task is conducted to validate the learning transferability and feasibility of the proposed approach.