 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLayered Cost-Map-Based Traffic Management for Multiple Automated Mobile Robots via a Data Distribution Service
Jul 18, 2022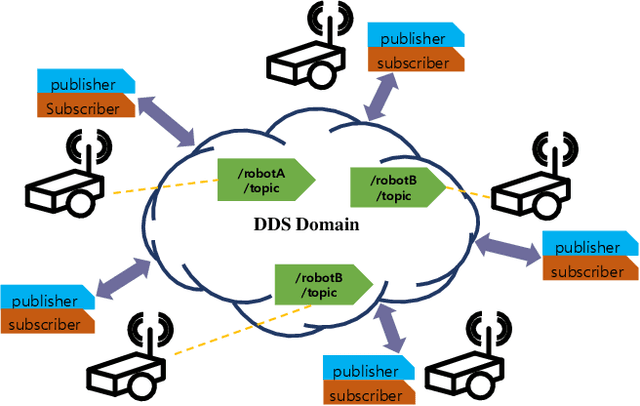
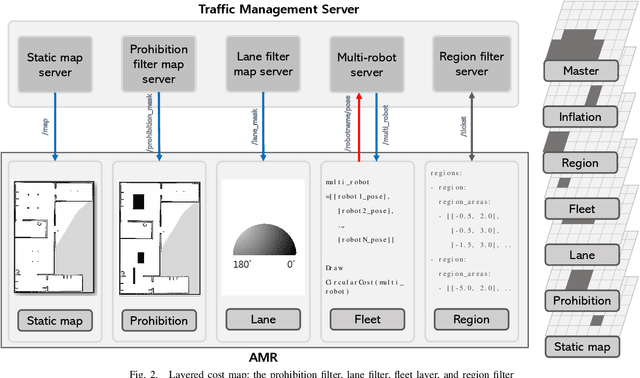

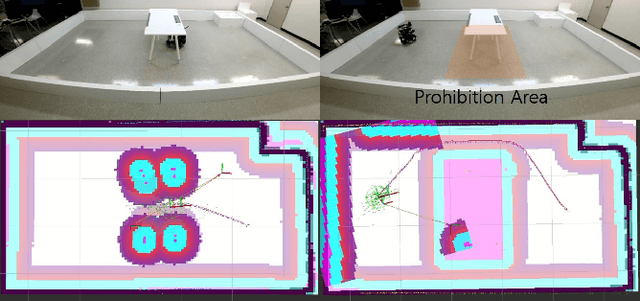
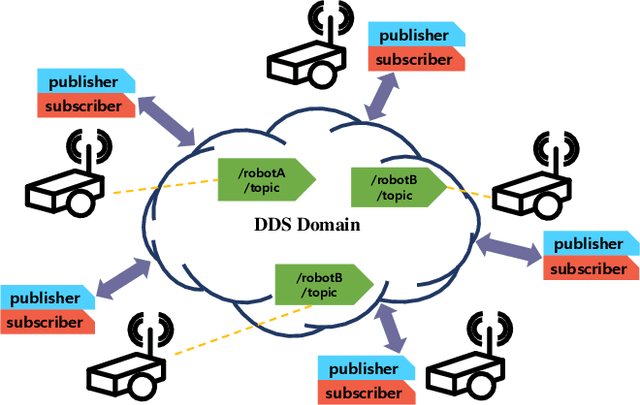
This letter proposes traffic management for multiple automated mobile robots (AMRs) based on a layered cost map. Multiple AMRs communicate via a data distribution service (DDS), which is shared by topics in the same DDS domain. The cost of each layer is manipulated by topics. The traffic management server in the domain sends or receives topics to each of AMRs. Using the layered cost map, the new concept of prohibition filter, lane filter, fleet layer, and region filter are proposed and implemented. The prohibition filter can help a user set an area that would prohibit an AMR from trespassing. The lane filter can help set one-way directions based on an angle image. The fleet layer can help AMRs share their locations via the traffic management server. The region filter requests for or receives an exclusive area, which can be occupied by only one AMR, from the traffic management server. All the layers are experimentally validated with real-world AMRs. Each area can be configured with user-defined images or text-based parameter files.
Behavior Tree-Based Asynchronous Task Planning for Multiple Mobile Robots using a Data Distribution Service
Jan 26, 2022
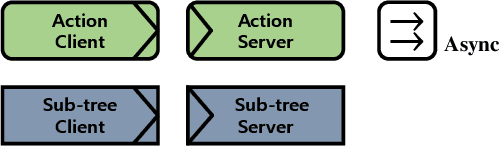

In this study, we propose task planning framework for multiple robots that builds on a behavior tree (BT). BTs communicate with a data distribution service (DDS) to send and receive data. Since the standard BT derived from one root node with a single tick is unsuitable for multiple robots, a novel type of BT action and improved nodes are proposed to control multiple robots through a DDS asynchronously. To plan tasks for robots efficiently, a single task planning unit is implemented with the proposed task types. The task planning unit assigns tasks to each robot simultaneously through a single coalesced BT. If any robot falls into a fault while performing its assigned task, another BT embedded in the robot is executed; the robot enters the recovery mode in order to overcome the fault. To perform this function, the action in the BT corresponding to the task is defined as a variable, which is shared with the DDS so that any action can be exchanged between the task planning unit and robots. To show the feasibility of our framework in a real-world application, three mobile robots were experimentally coordinated for them to travel alternately to four goal positions by the proposed single task planning unit via a DDS.