 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Geometric Learning with Monotonicity Constraints for Alzheimer's Disease Progression
Oct 05, 2023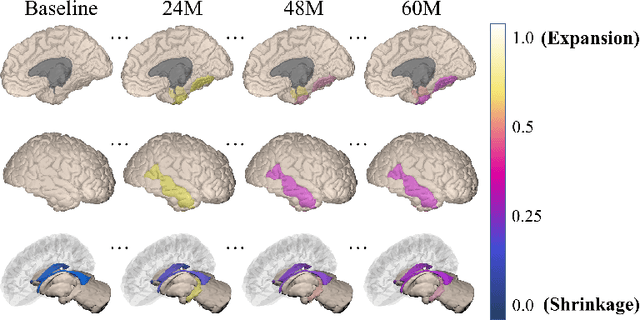
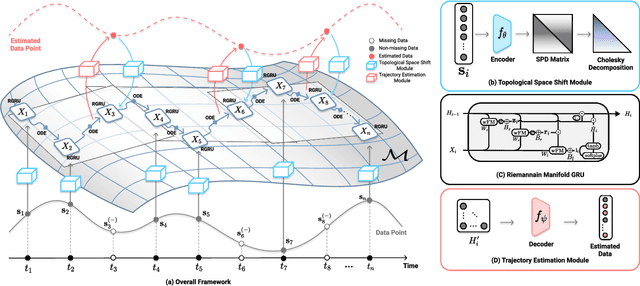
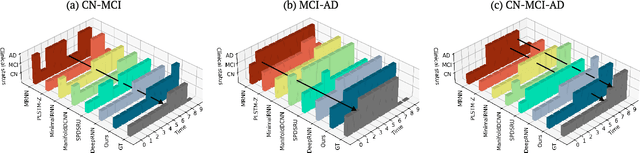
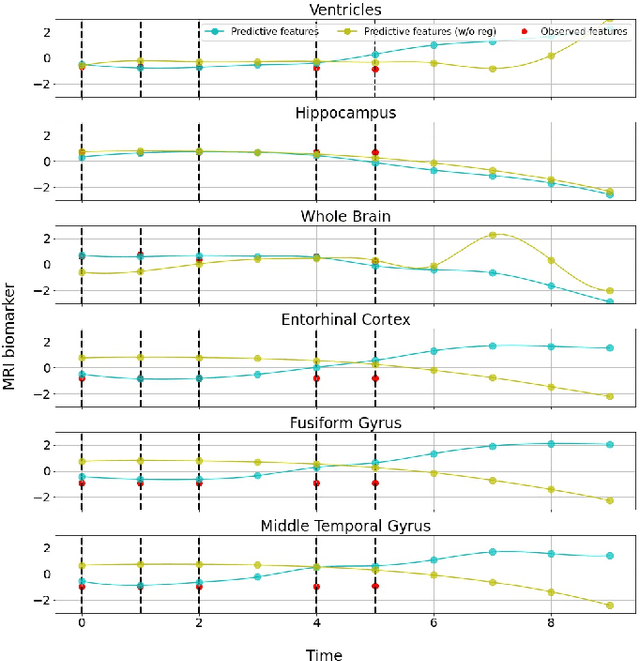
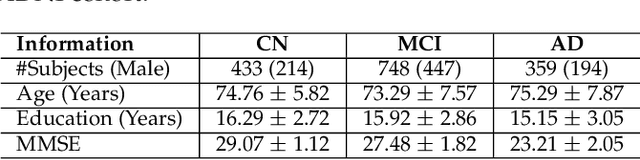
Alzheimer's disease (AD) is a devastating neurodegenerative condition that precedes progressive and irreversible dementia; thus, predicting its progression over time is vital for clinical diagnosis and treatment. Numerous studies have implemented structural magnetic resonance imaging (MRI) to model AD progression, focusing on three integral aspects: (i) temporal variability, (ii) incomplete observations, and (iii) temporal geometric characteristics. However, deep learning-based approaches regarding data variability and sparsity have yet to consider inherent geometrical properties sufficiently. The ordinary differential equation-based geometric modeling method (ODE-RGRU) has recently emerged as a promising strategy for modeling time-series data by intertwining a recurrent neural network and an ODE in Riemannian space. Despite its achievements, ODE-RGRU encounters limitations when extrapolating positive definite symmetric metrics from incomplete samples, leading to feature reverse occurrences that are particularly problematic, especially within the clinical facet. Therefore, this study proposes a novel geometric learning approach that models longitudinal MRI biomarkers and cognitive scores by combining three modules: topological space shift, ODE-RGRU, and trajectory estimation. We have also developed a training algorithm that integrates manifold mapping with monotonicity constraints to reflect measurement transition irreversibility. We verify our proposed method's efficacy by predicting clinical labels and cognitive scores over time in regular and irregular settings. Furthermore, we thoroughly analyze our proposed framework through an ablation study.
Layered Cost-Map-Based Traffic Management for Multiple Automated Mobile Robots via a Data Distribution Service
Jul 18, 2022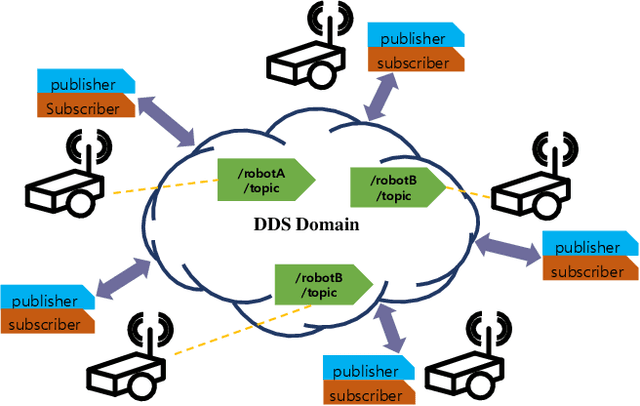
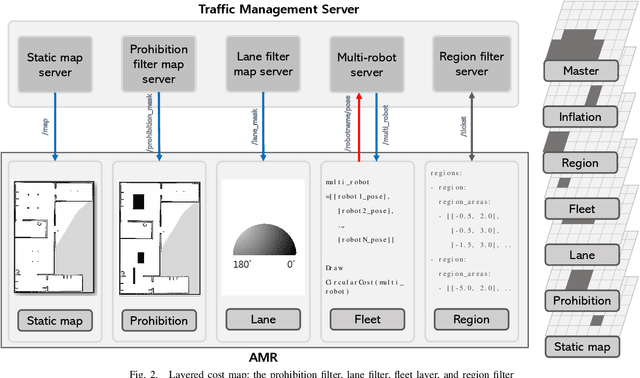

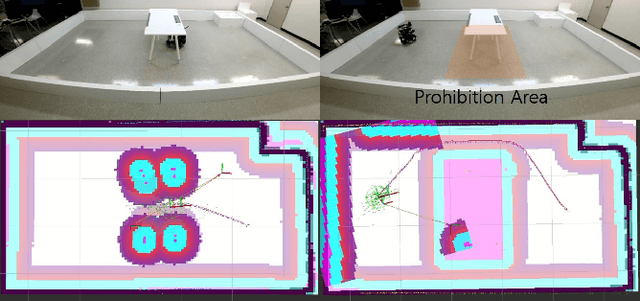
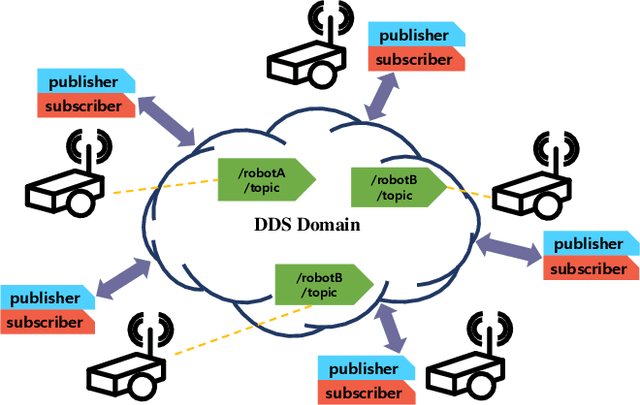
This letter proposes traffic management for multiple automated mobile robots (AMRs) based on a layered cost map. Multiple AMRs communicate via a data distribution service (DDS), which is shared by topics in the same DDS domain. The cost of each layer is manipulated by topics. The traffic management server in the domain sends or receives topics to each of AMRs. Using the layered cost map, the new concept of prohibition filter, lane filter, fleet layer, and region filter are proposed and implemented. The prohibition filter can help a user set an area that would prohibit an AMR from trespassing. The lane filter can help set one-way directions based on an angle image. The fleet layer can help AMRs share their locations via the traffic management server. The region filter requests for or receives an exclusive area, which can be occupied by only one AMR, from the traffic management server. All the layers are experimentally validated with real-world AMRs. Each area can be configured with user-defined images or text-based parameter files.
Behavior Tree-Based Asynchronous Task Planning for Multiple Mobile Robots using a Data Distribution Service
Jan 26, 2022

In this study, we propose task planning framework for multiple robots that builds on a behavior tree (BT). BTs communicate with a data distribution service (DDS) to send and receive data. Since the standard BT derived from one root node with a single tick is unsuitable for multiple robots, a novel type of BT action and improved nodes are proposed to control multiple robots through a DDS asynchronously. To plan tasks for robots efficiently, a single task planning unit is implemented with the proposed task types. The task planning unit assigns tasks to each robot simultaneously through a single coalesced BT. If any robot falls into a fault while performing its assigned task, another BT embedded in the robot is executed; the robot enters the recovery mode in order to overcome the fault. To perform this function, the action in the BT corresponding to the task is defined as a variable, which is shared with the DDS so that any action can be exchanged between the task planning unit and robots. To show the feasibility of our framework in a real-world application, three mobile robots were experimentally coordinated for them to travel alternately to four goal positions by the proposed single task planning unit via a DDS.
Efficient Continuous Manifold Learning for Time Series Modeling
Dec 03, 2021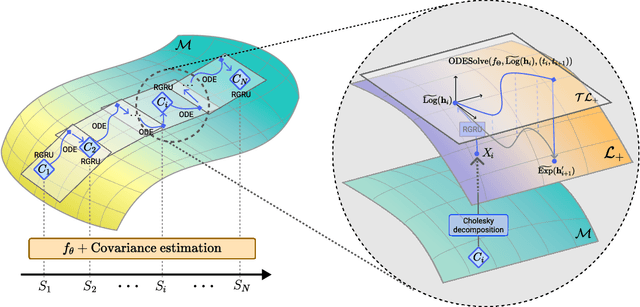
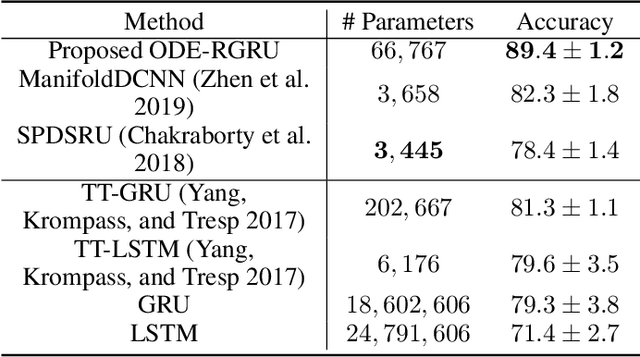

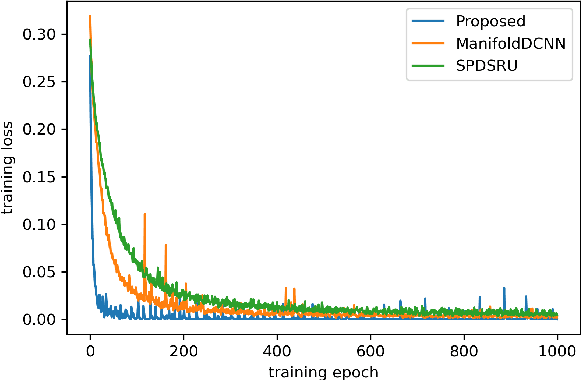
Modeling non-Euclidean data is drawing attention along with the unprecedented successes of deep neural networks in diverse fields. In particular, symmetric positive definite (SPD) matrix is being actively studied in computer vision, signal processing, and medical image analysis, thanks to its ability to learn appropriate statistical representations. However, due to its strong constraints, it remains challenging for optimization problems or inefficient computation costs, especially, within a deep learning framework. In this paper, we propose to exploit a diffeomorphism mapping between Riemannian manifolds and a Cholesky space, by which it becomes feasible not only to efficiently solve optimization problems but also to reduce computation costs greatly. Further, in order for dynamics modeling in time series data, we devise a continuous manifold learning method by integrating a manifold ordinary differential equation and a gated recurrent neural network in a systematic manner. It is noteworthy that because of the nice parameterization of matrices in a Cholesky space, it is straightforward to train our proposed network with Riemannian geometric metrics equipped. We demonstrate through experiments that the proposed model can be efficiently and reliably trained as well as outperform existing manifold methods and state-of-the-art methods in two classification tasks: action recognition and sleep staging classification.
Medical Transformer: Universal Brain Encoder for 3D MRI Analysis
Apr 28, 2021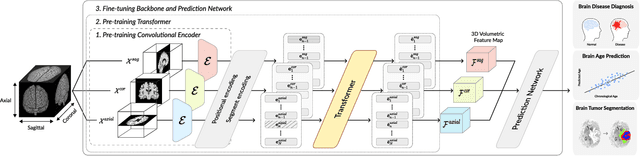
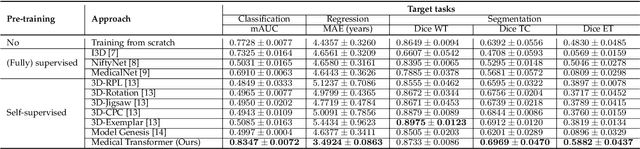
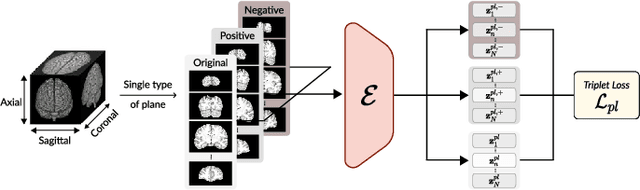
Transfer learning has gained attention in medical image analysis due to limited annotated 3D medical datasets for training data-driven deep learning models in the real world. Existing 3D-based methods have transferred the pre-trained models to downstream tasks, which achieved promising results with only a small number of training samples. However, they demand a massive amount of parameters to train the model for 3D medical imaging. In this work, we propose a novel transfer learning framework, called Medical Transformer, that effectively models 3D volumetric images in the form of a sequence of 2D image slices. To make a high-level representation in 3D-form empowering spatial relations better, we take a multi-view approach that leverages plenty of information from the three planes of 3D volume, while providing parameter-efficient training. For building a source model generally applicable to various tasks, we pre-train the model in a self-supervised learning manner for masked encoding vector prediction as a proxy task, using a large-scale normal, healthy brain magnetic resonance imaging (MRI) dataset. Our pre-trained model is evaluated on three downstream tasks: (i) brain disease diagnosis, (ii) brain age prediction, and (iii) brain tumor segmentation, which are actively studied in brain MRI research. The experimental results show that our Medical Transformer outperforms the state-of-the-art transfer learning methods, efficiently reducing the number of parameters up to about 92% for classification and
Multi-Scale Neural network for EEG Representation Learning in BCI
Mar 02, 2020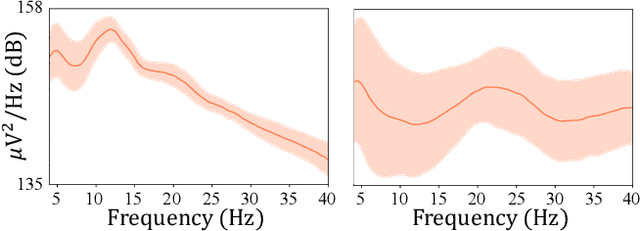

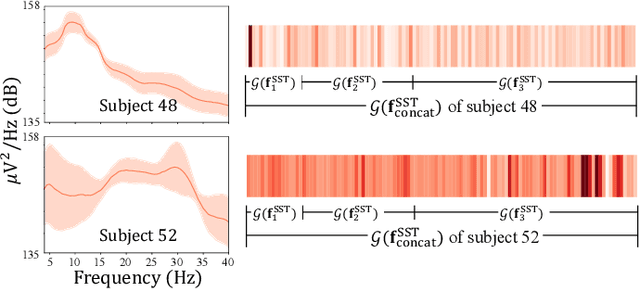
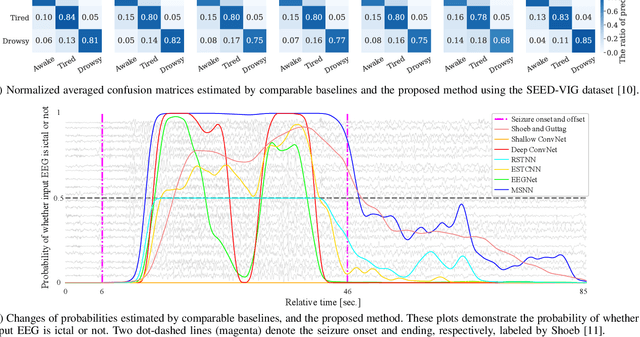
Recent advances in deep learning have had a methodological and practical impact on brain-computer interface research. Among the various deep network architectures, convolutional neural networks have been well suited for spatio-spectral-temporal electroencephalogram signal representation learning. Most of the existing CNN-based methods described in the literature extract features at a sequential level of abstraction with repetitive nonlinear operations and involve densely connected layers for classification. However, studies in neurophysiology have revealed that EEG signals carry information in different ranges of frequency components. To better reflect these multi-frequency properties in EEGs, we propose a novel deep multi-scale neural network that discovers feature representations in multiple frequency/time ranges and extracts relationships among electrodes, i.e., spatial representations, for subject intention/condition identification. Furthermore, by completely representing EEG signals with spatio-spectral-temporal information, the proposed method can be utilized for diverse paradigms in both active and passive BCIs, contrary to existing methods that are primarily focused on single-paradigm BCIs. To demonstrate the validity of our proposed method, we conducted experiments on various paradigms of active/passive BCI datasets. Our experimental results demonstrated that the proposed method achieved performance improvements when judged against comparable state-of-the-art methods. Additionally, we analyzed the proposed method using different techniques, such as PSD curves and relevance score inspection to validate the multi-scale EEG signal information capturing ability, activation pattern maps for investigating the learned spatial filters, and t-SNE plotting for visualizing represented features. Finally, we also demonstrated our method's application to real-world problems.