 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffusion-EDFs: Bi-equivariant Denoising Generative Modeling on SE(3) for Visual Robotic Manipulation
Paper and Code
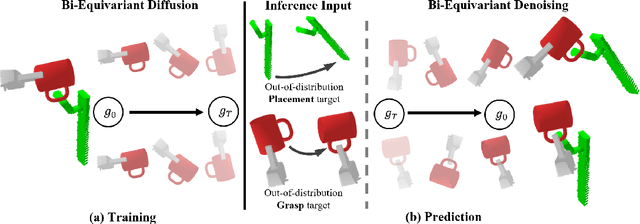



Recent studies have verified that equivariant methods can significantly improve the data efficiency, generalizability, and robustness in robot learning. Meanwhile, denoising diffusion-based generative modeling has recently gained significant attention as a promising approach for robotic manipulation learning from demonstrations with stochastic behaviors. In this paper, we present Diffusion-EDFs, a novel approach that incorporates spatial roto-translation equivariance, i.e., SE(3)-equivariance to diffusion generative modeling. By integrating SE(3)-equivariance into our model architectures, we demonstrate that our proposed method exhibits remarkable data efficiency, requiring only 5 to 10 task demonstrations for effective end-to-end training. Furthermore, our approach showcases superior generalizability compared to previous diffusion-based manipulation methods.