 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometric Formulation of Unified Force-Impedance Control on SE(3) for Robotic Manipulators
Apr 23, 2025



In this paper, we present an impedance control framework on the SE(3) manifold, which enables force tracking while guaranteeing passivity. Building upon the unified force-impedance control (UFIC) and our previous work on geometric impedance control (GIC), we develop the geometric unified force impedance control (GUFIC) to account for the SE(3) manifold structure in the controller formulation using a differential geometric perspective. As in the case of the UFIC, the GUFIC utilizes energy tank augmentation for both force-tracking and impedance control to guarantee the manipulator's passivity relative to external forces. This ensures that the end effector maintains safe contact interaction with uncertain environments and tracks a desired interaction force. Moreover, we resolve a non-causal implementation problem in the UFIC formulation by introducing velocity and force fields. Due to its formulation on SE(3), the proposed GUFIC inherits the desirable SE(3) invariance and equivariance properties of the GIC, which helps increase sample efficiency in machine learning applications where a learning algorithm is incorporated into the control law. The proposed control law is validated in a simulation environment under scenarios requiring tracking an SE(3) trajectory, incorporating both position and orientation, while exerting a force on a surface. The codes are available at https://github.com/Joohwan-Seo/GUFIC_mujoco.
A Comparison Between Lie Group- and Lie Algebra- Based Potential Functions for Geometric Impedance Control
Jan 24, 2024



In this paper, a comparison analysis between geometric impedance controls (GICs) derived from two different potential functions on SE(3) for robotic manipulators is presented. The first potential function is defined on the Lie group, utilizing the Frobenius norm of the configuration error matrix. The second potential function is defined utilizing the Lie algebra, i.e., log-map of the configuration error. Using a differential geometric approach, the detailed derivation of the distance metric and potential function on SE(3) is introduced. The GIC laws are respectively derived from the two potential functions, followed by extensive comparison analyses. In the qualitative analysis, the properties of the error function and control laws are analyzed, while the performances of the controllers are quantitatively compared using numerical simulation.
Clustering Techniques for Stable Linear Dynamical Systems with applications to Hard Disk Drives
Nov 17, 2023



In Robust Control and Data Driven Robust Control design methodologies, multiple plant transfer functions or a family of transfer functions are considered and a common controller is designed such that all the plants that fall into this family are stabilized. Though the plants are stabilized, the controller might be sub-optimal for each of the plants when the variations in the plants are large. This paper presents a way of clustering stable linear dynamical systems for the design of robust controllers within each of the clusters such that the controllers are optimal for each of the clusters. First a k-medoids algorithm for hard clustering will be presented for stable Linear Time Invariant (LTI) systems and then a Gaussian Mixture Models (GMM) clustering for a special class of LTI systems, common for Hard Disk Drive plants, will be presented.
Robot Manipulation Task Learning by Leveraging SE(3) Group Invariance and Equivariance
Aug 29, 2023



This paper presents a differential geometric control approach that leverages SE(3) group invariance and equivariance to increase transferability in learning robot manipulation tasks that involve interaction with the environment. Specifically, we employ a control law and a learning representation framework that remain invariant under arbitrary SE(3) transformations of the manipulation task definition. Furthermore, the control law and learning representation framework are shown to be SE(3) equivariant when represented relative to the spatial frame. The proposed approach is based on utilizing a recently presented geometric impedance control (GIC) combined with a learning variable impedance control framework, where the gain scheduling policy is trained in a supervised learning fashion from expert demonstrations. A geometrically consistent error vector (GCEV) is fed to a neural network to achieve a gain scheduling policy that remains invariant to arbitrary translation and rotations. A comparison of our proposed control and learning framework with a well-known Cartesian space learning impedance control, equipped with a Cartesian error vector-based gain scheduling policy, confirms the significantly superior learning transferability of our proposed approach. A hardware implementation on a peg-in-hole task is conducted to validate the learning transferability and feasibility of the proposed approach.
Geometric Impedance Control on SE for Robotic Manipulators
Nov 15, 2022After its introduction, impedance control has been utilized as a primary control scheme for robotic manipulation tasks that involve interaction with unknown environments. While impedance control has been extensively studied, the geometric structure of SE(3) for the robotic manipulator itself and its use in formulating a robotic task has not been adequately addressed. In this paper, we propose a differential geometric approach to impedance control. Given a left-invariant error metric in SE(3), the corresponding error vectors in position and velocity are first derived. Using these geometrically consistent error vectors, we propose a novel impedance control scheme, which adequately accounts for the geometric structure of the manipulator in SE(3). The closed-loop stability for the proposed control schemes is verified using a Lyapunov function-based analysis. The proposed control design clearly outperformed a conventional impedance control approach when tracking challenging trajectory profiles.
Adaptive Model Predictive Control of Wheeled Mobile Robots
Jan 03, 2022
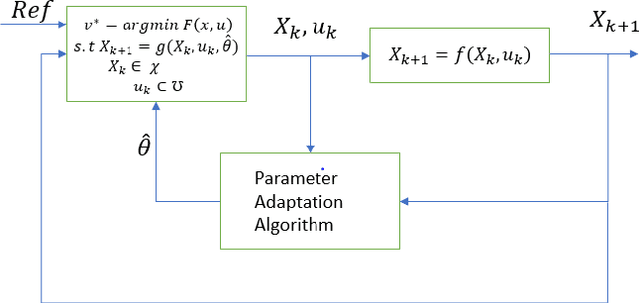

In this paper, a control algorithm for guiding a two wheeled mobile robot with unknown inertia to a desired point and orientation using an Adaptive Model Predictive Control (AMPC) framework is presented. The two wheeled mobile robot is modeled as a knife edge or a skate with nonholonomic kinematic constraints and the dynamical equations are derived using the Lagrangian approach. The inputs at every time instant are obtained from Model Predictive Control (MPC) with a set of nominal parameters which are updated using a recursive least squares algorithm. The efficacy of the algorithm is demonstrated through numerical simulations at the end of the paper.
Nonlinear control of a swinging pendulum on a wheeled mobile robot with nonholonomic constraints
Nov 18, 2018
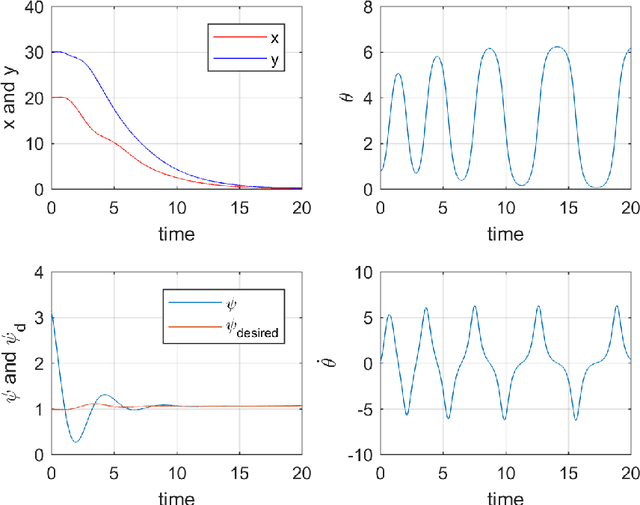
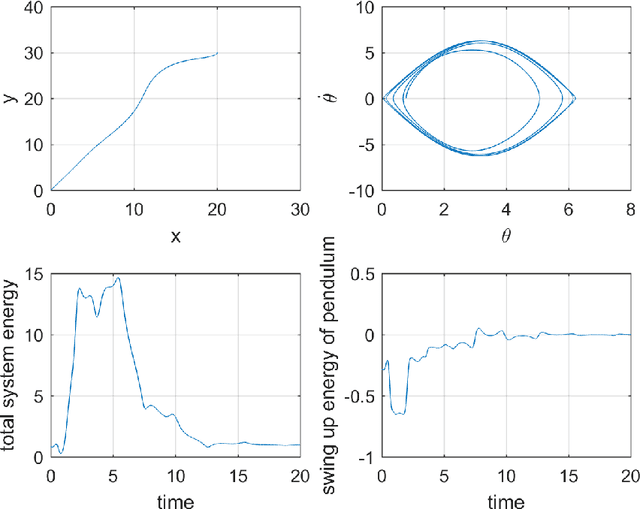
In this paper, we propose a nonlinear control strategy for swinging up a pendulum to its upright equilibrium position by shaping its swinging energy along with regulating the cart to a desired location. While the base of a usual cart-pole system is restricted to move in a straight line, the present system is allowed to move in the x-y plane with a nonholonomic consraint that its allowable velocity is only along its orientation. A simple time invariant control law has been presented and its effectiveness has been demonstrated using numerical experiments.