Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Model Predictive Control of Wheeled Mobile Robots
Jan 03, 2022
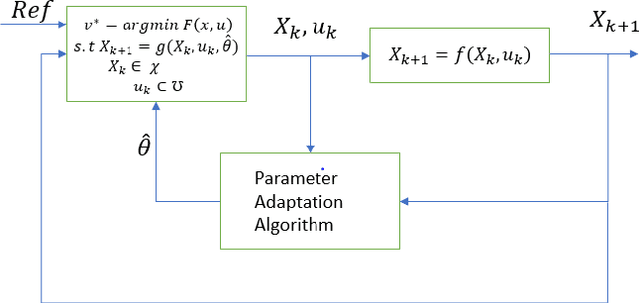
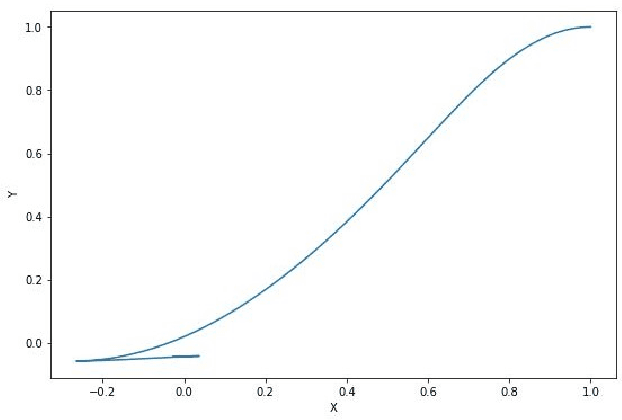

In this paper, a control algorithm for guiding a two wheeled mobile robot with unknown inertia to a desired point and orientation using an Adaptive Model Predictive Control (AMPC) framework is presented. The two wheeled mobile robot is modeled as a knife edge or a skate with nonholonomic kinematic constraints and the dynamical equations are derived using the Lagrangian approach. The inputs at every time instant are obtained from Model Predictive Control (MPC) with a set of nominal parameters which are updated using a recursive least squares algorithm. The efficacy of the algorithm is demonstrated through numerical simulations at the end of the paper.
* 5 pages, 7 figures
Via