Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlinear control of a swinging pendulum on a wheeled mobile robot with nonholonomic constraints
Paper and Code
Nov 18, 2018
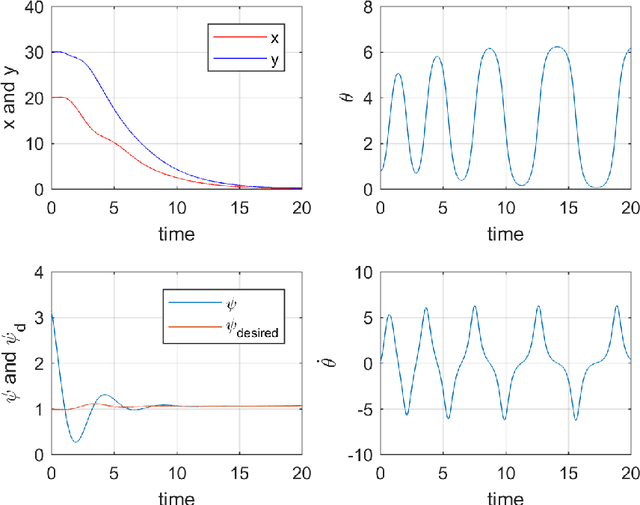
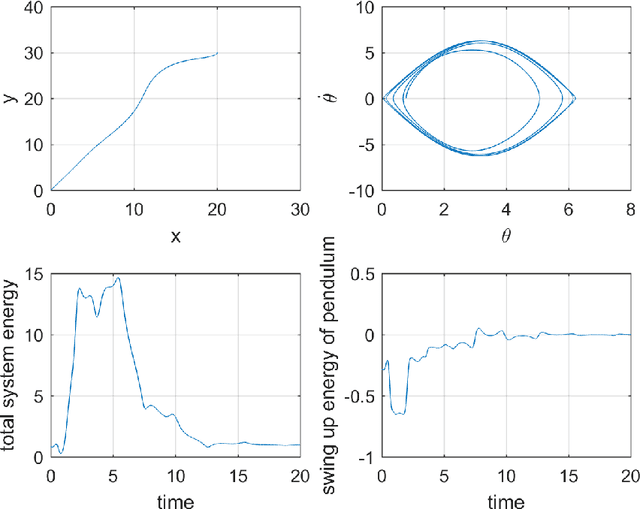
In this paper, we propose a nonlinear control strategy for swinging up a pendulum to its upright equilibrium position by shaping its swinging energy along with regulating the cart to a desired location. While the base of a usual cart-pole system is restricted to move in a straight line, the present system is allowed to move in the x-y plane with a nonholonomic consraint that its allowable velocity is only along its orientation. A simple time invariant control law has been presented and its effectiveness has been demonstrated using numerical experiments.
* 8 pages, 3 figures
View paper on