 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCBMC-V3: A CNS-inspired Control Framework Towards Manipulation Agility with SNN
Nov 06, 2025


As robotic arm applications extend beyond industrial settings into healthcare, service, and daily life, existing control algorithms struggle to achieve the agile manipulation required for complex environments with dynamic trajectories, unpredictable interactions, and diverse objects. This paper presents a biomimetic control framework based on Spiking Neural Networks (SNN), inspired by the human Central Nervous System (CNS), to achieve agile control in such environments. The proposed framework features five control modules (cerebral cortex, cerebellum, thalamus, brainstem, spinal cord), three hierarchical control levels (first-order, second-order, third-order), and two information pathways (ascending, descending). Each module is fully implemented using SNN. The spinal cord module uses spike encoding and Leaky Integrate-and-Fire (LIF) neurons for feedback control. The brainstem module employs a network of LIF and non-spiking LIF neurons to dynamically adjust spinal cord parameters via reinforcement learning. The thalamus module similarly adjusts the cerebellum's torque outputs. The cerebellum module uses a recurrent SNN to learn the robotic arm's dynamics through regression, providing feedforward gravity compensation torques. The framework is validated both in simulation and on real-world robotic arm platform under various loads and trajectories. Results demonstrate that our method outperforms the industrial-grade position control in manipulation agility.
Learning Vision-Driven Reactive Soccer Skills for Humanoid Robots
Nov 06, 2025Humanoid soccer poses a representative challenge for embodied intelligence, requiring robots to operate within a tightly coupled perception-action loop. However, existing systems typically rely on decoupled modules, resulting in delayed responses and incoherent behaviors in dynamic environments, while real-world perceptual limitations further exacerbate these issues. In this work, we present a unified reinforcement learning-based controller that enables humanoid robots to acquire reactive soccer skills through the direct integration of visual perception and motion control. Our approach extends Adversarial Motion Priors to perceptual settings in real-world dynamic environments, bridging motion imitation and visually grounded dynamic control. We introduce an encoder-decoder architecture combined with a virtual perception system that models real-world visual characteristics, allowing the policy to recover privileged states from imperfect observations and establish active coordination between perception and action. The resulting controller demonstrates strong reactivity, consistently executing coherent and robust soccer behaviors across various scenarios, including real RoboCup matches.
Booster Gym: An End-to-End Reinforcement Learning Framework for Humanoid Robot Locomotion
Jun 18, 2025Recent advancements in reinforcement learning (RL) have led to significant progress in humanoid robot locomotion, simplifying the design and training of motion policies in simulation. However, the numerous implementation details make transferring these policies to real-world robots a challenging task. To address this, we have developed a comprehensive code framework that covers the entire process from training to deployment, incorporating common RL training methods, domain randomization, reward function design, and solutions for handling parallel structures. This library is made available as a community resource, with detailed descriptions of its design and experimental results. We validate the framework on the Booster T1 robot, demonstrating that the trained policies seamlessly transfer to the physical platform, enabling capabilities such as omnidirectional walking, disturbance resistance, and terrain adaptability. We hope this work provides a convenient tool for the robotics community, accelerating the development of humanoid robots. The code can be found in https://github.com/BoosterRobotics/booster_gym.
HiFAR: Multi-Stage Curriculum Learning for High-Dynamics Humanoid Fall Recovery
Feb 28, 2025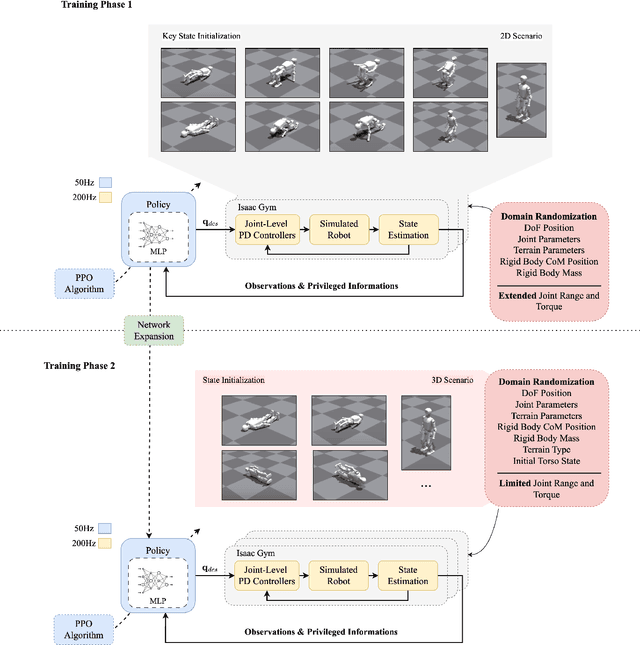
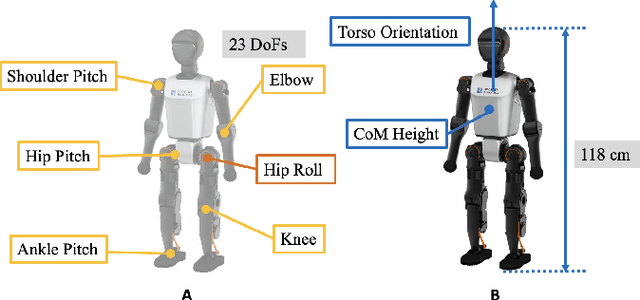
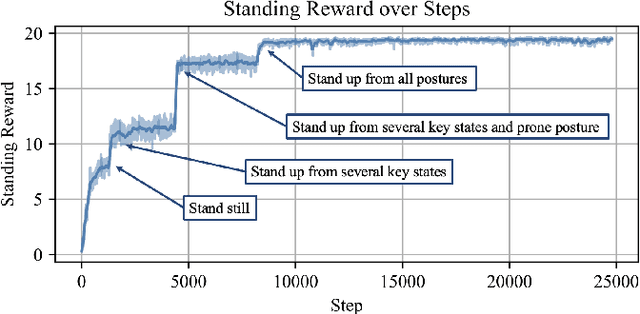
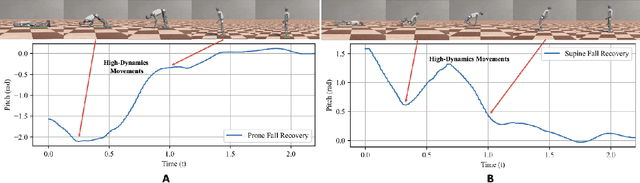
Humanoid robots encounter considerable difficulties in autonomously recovering from falls, especially within dynamic and unstructured environments. Conventional control methodologies are often inadequate in addressing the complexities associated with high-dimensional dynamics and the contact-rich nature of fall recovery. Meanwhile, reinforcement learning techniques are hindered by issues related to sparse rewards, intricate collision scenarios, and discrepancies between simulation and real-world applications. In this study, we introduce a multi-stage curriculum learning framework, termed HiFAR. This framework employs a staged learning approach that progressively incorporates increasingly complex and high-dimensional recovery tasks, thereby facilitating the robot's acquisition of efficient and stable fall recovery strategies. Furthermore, it enables the robot to adapt its policy to effectively manage real-world fall incidents. We assess the efficacy of the proposed method using a real humanoid robot, showcasing its capability to autonomously recover from a diverse range of falls with high success rates, rapid recovery times, robustness, and generalization.
Robust Quadrupedal Locomotion via Risk-Averse Policy Learning
Sep 01, 2023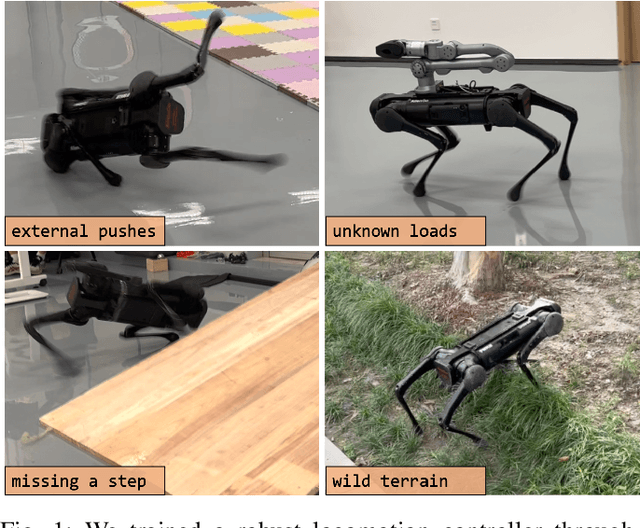
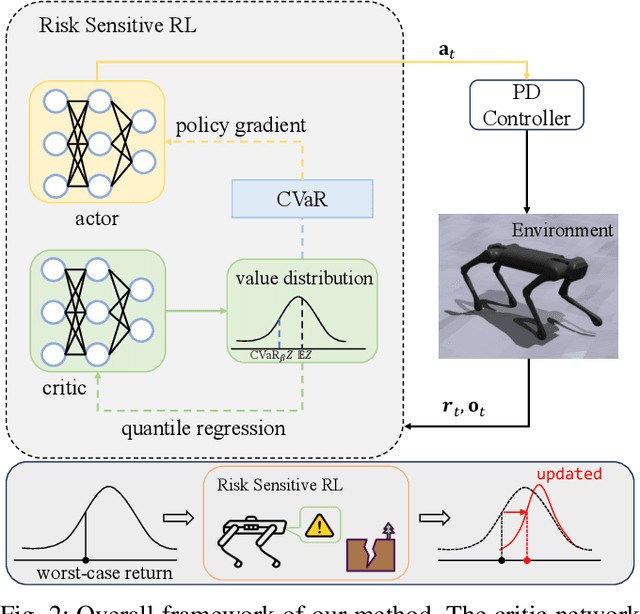
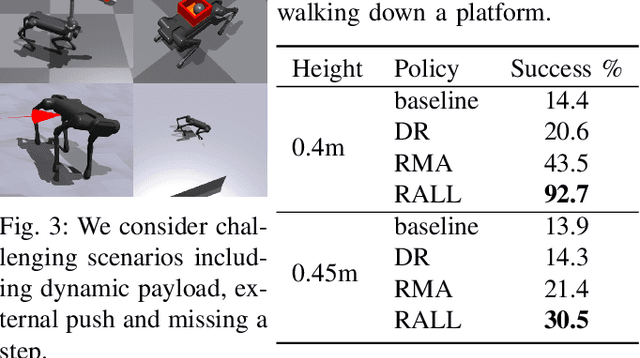
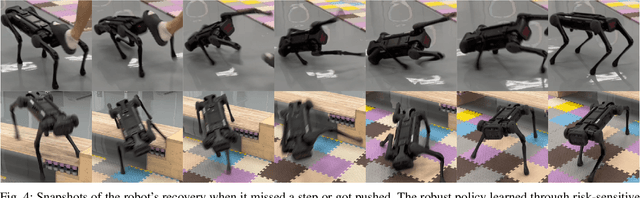
The robustness of legged locomotion is crucial for quadrupedal robots in challenging terrains. Recently, Reinforcement Learning (RL) has shown promising results in legged locomotion and various methods try to integrate privileged distillation, scene modeling, and external sensors to improve the generalization and robustness of locomotion policies. However, these methods are hard to handle uncertain scenarios such as abrupt terrain changes or unexpected external forces. In this paper, we consider a novel risk-sensitive perspective to enhance the robustness of legged locomotion. Specifically, we employ a distributional value function learned by quantile regression to model the aleatoric uncertainty of environments, and perform risk-averse policy learning by optimizing the worst-case scenarios via a risk distortion measure. Extensive experiments in both simulation environments and a real Aliengo robot demonstrate that our method is efficient in handling various external disturbances, and the resulting policy exhibits improved robustness in harsh and uncertain situations in legged locomotion. Videos are available at https://risk-averse-locomotion.github.io/.
Prioritized Hierarchical Compliance Control for Dual-Arm Robot Stable Clamping
Dec 20, 2021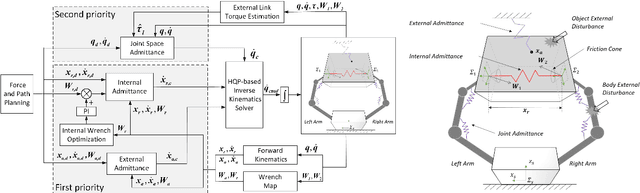
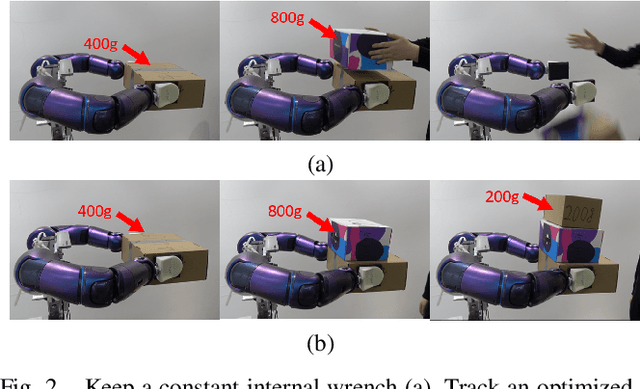
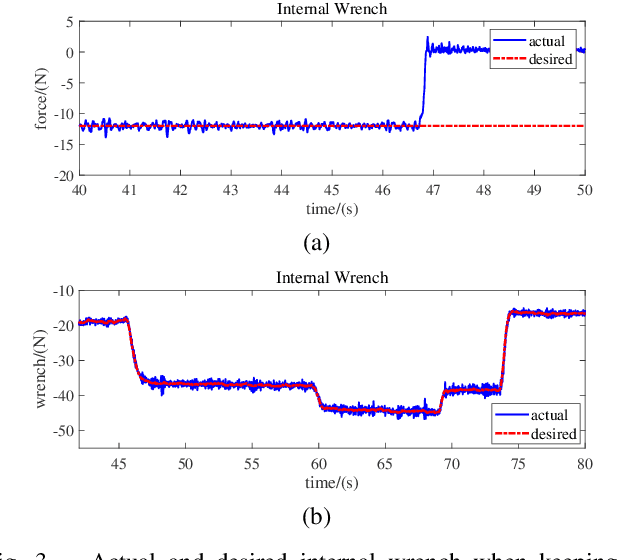
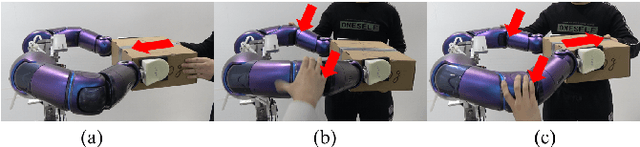
When a dual-arm robot clamps a rigid object in an environment for human beings, the environment or the collaborating human will impose incidental disturbance on the operated object or the robot arm, leading to clamping failure, damaging the robot even hurting the human. This research proposes a prioritized hierarchical compliance control to simultaneously deal with the two types of disturbances in the dual-arm robot clamping. First, we use hierarchical quadratic programming (HQP) to solve the robot inverse kinematics under the joint constraints and prioritize the compliance for the disturbance on the object over that on the robot arm. Second, we estimate the disturbance forces throughout the momentum observer with the F/T sensors and adopt admittance control to realize the compliances. Finally, we perform the verify experiments on a 14-DOF position-controlled dual-arm robot WalkerX, clamping a rigid object stably while realizing the compliance against the disturbances.
Recursive Hierarchical Projection for Whole-Body Control with Task Priority Transition
Sep 22, 2021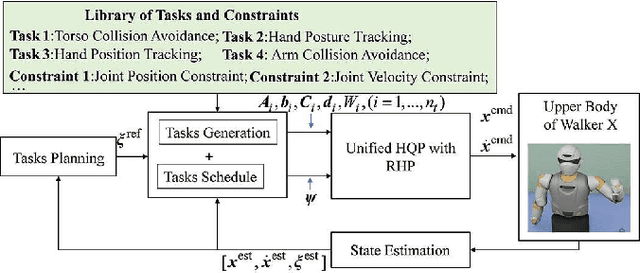
Redundant robots are desired to execute multitasks with different priorities simultaneously. The task priorities are necessary to be transitioned for complex task scheduling of whole-body control (WBC). Many methods focused on guaranteeing the control continuity during task priority transition, however either increased the computation consumption or sacrificed the accuracy of tasks inevitably. This work formulates the WBC problem with task priority transition as an Hierarchical Quadratic Programming (HQP) with Recursive Hierarchical Projection (RHP) matrices. The tasks of each level are solved recursively through HQP. We propose the RHP matrix to form the continuously changing projection of each level so that the task priority transition is achieved without increasing computation consumption. Additionally, the recursive approach solves the WBC problem without losing the accuracy of tasks. We verify the effectiveness of this scheme by the comparative simulations of the reactive collision avoidance through multi-tasks priority transitions.
Mixed Control for Whole-Body Compliance of a Humanoid Robot
Sep 16, 2021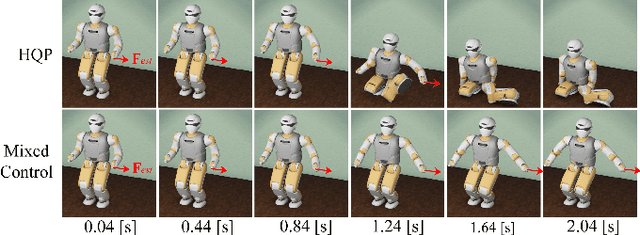
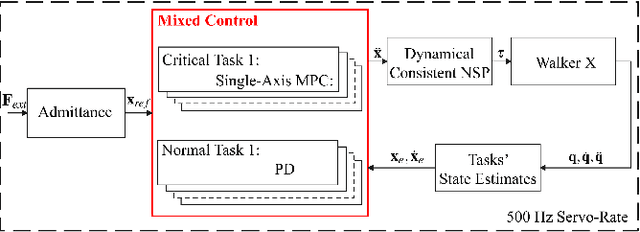
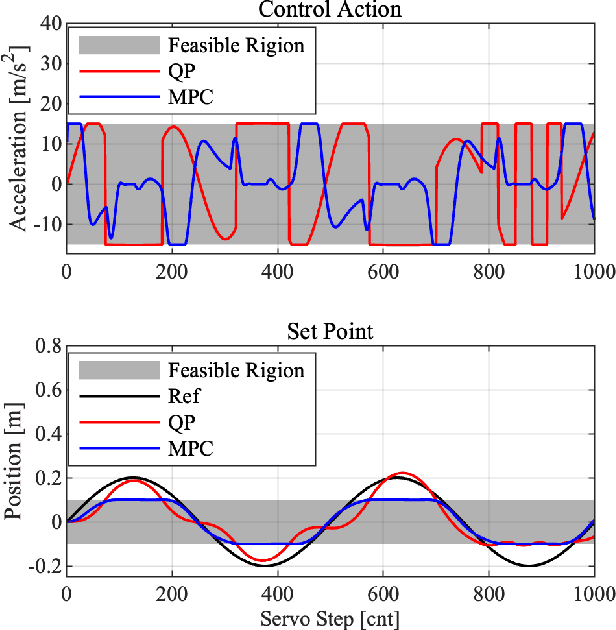
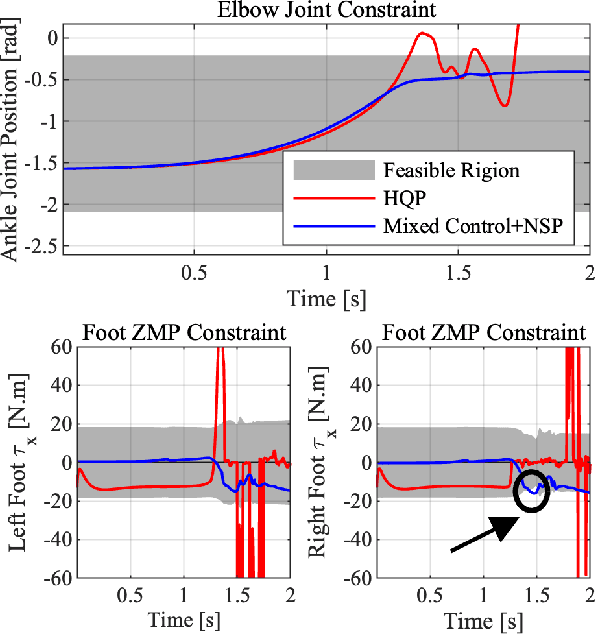
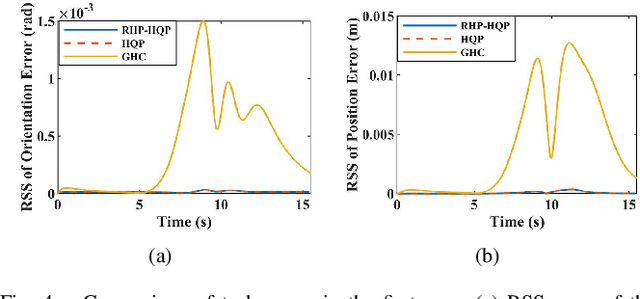
The hierarchical quadratic programming (HQP) is commonly applied to consider strict hierarchies of multi-tasks and robot's physical inequality constraints during whole-body compliance. However, for the one-step HQP, the solution can oscillate when it is close to the boundary of constraints. It is because the abrupt hit of the bounds gives rise to unrealisable jerks and even infeasible solutions. This paper proposes the mixed control, which blends the single-axis model predictive control (MPC) and proportional derivate (PD) control for the whole-body compliance to overcome these deficiencies. The MPC predicts the distances between the bounds and the control target of the critical tasks, and it provides smooth and feasible solutions by prediction and optimisation in advance. However, applying MPC will inevitably increase the computation time. Therefore, to achieve a 500 Hz servo rate, the PD controllers still regulate other tasks to save computation resources. Also, we use a more efficient null space projection (NSP) whole-body controller instead of the HQP and distribute the single-axis MPCs into four CPU cores for parallel computation. Finally, we validate the desired capabilities of the proposed strategy via Simulations and the experiment on the humanoid robot Walker X.
Whole-Body Control with Motion/Force Transmissibility for Parallel-Legged Robot
Sep 15, 2021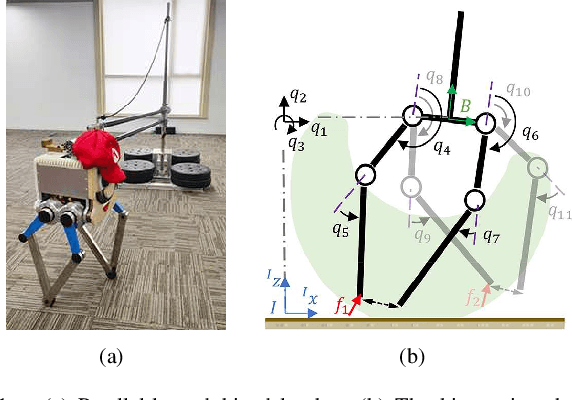
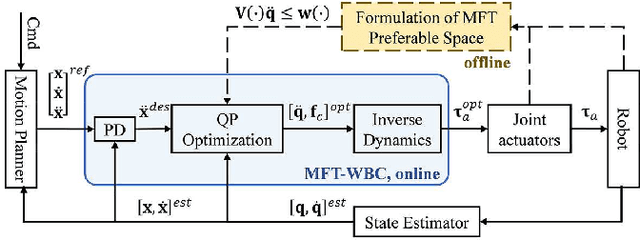
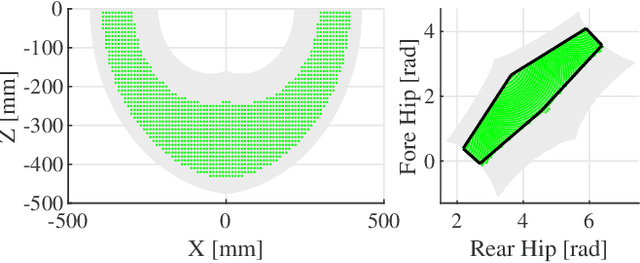
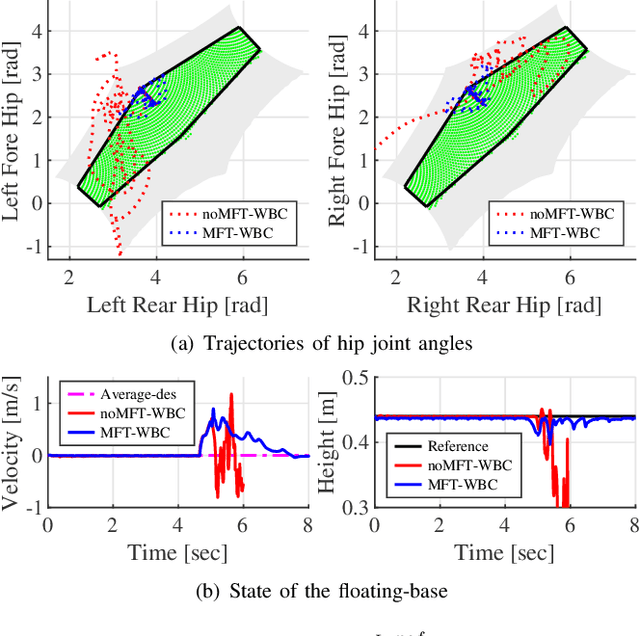
Whole-body control (WBC) has been applied to the locomotion of legged robots. However, current WBC methods have not considered the intrinsic features of parallel mechanisms, especially motion/force transmissibility (MFT). In this work, we propose an MFT-enhanced WBC scheme. Introducing MFT into a WBC is challenging due to the nonlinear relationship between MFT indices and the robot configuration. To overcome this challenge, we establish the MFT preferable space of the robot and formulate it as a polyhedron in the joint space at the acceleration level. Then, the WBC employs the polyhedron as a soft constraint. As a result, the robot possesses high-speed and high-acceleration capabilities by satisfying this constraint as well as staying away from its singularity. In contrast with the WBC without considering MFT, our proposed scheme is more robust to external disturbances, e.g., push recovery and uneven terrain locomotion. simulations and experiments on a parallel-legged bipedal robot are provided to demonstrate the performance and robustness of the proposed method.
Dynamic Balancing of Humanoid Robot Walker3 with Proprioceptive Actuation: Systematic Design of Algorithm, Software and Hardware
Aug 09, 2021
Dynamic balancing under uncertain disturbances is important for a humanoid robot, which requires a good capability of coordinating the entire body redundancy to execute multi tasks. Whole-body control (WBC) based on hierarchical optimization has been generally accepted and utilized in torque-controlled robots. A good hierarchy is the prerequisite for WBC and can be predefined according to prior knowledge. However, the real-time computation would be problematic in the physical applications considering the computational complexity of WBC. For robots with proprioceptive actuation, the joint friction in gear reducer would also degrade the torque tracking performance. In our paper, a reasonable hierarchy of tasks and constraints is first customized for robot dynamic balancing. Then a real-time WBC is implemented via a computationally efficient WBC software. Such a method is solved on a modular master control system UBTMaster characterized by the real-time communication and powerful computing capability. After the joint friction being well covered by the model identification, extensive experiments on various balancing scenarios are conducted on a humanoid Walker3 with proprioceptive actuation. The robot shows an outstanding balance performance even under external impulses as well as the two feet of the robot suffering the inclination and shift disturbances independently. The results demonstrate that with the strict hierarchy, real-time computation and joint friction being handled carefully, the robot with proprioceptive actuation can manage the dynamic physical interactions with the unstructured environments well.