 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Online Planning for Bipedal Locomotion via Centroidal Model Predictive Gait Synthesis
Paper and Code
Feb 26, 2021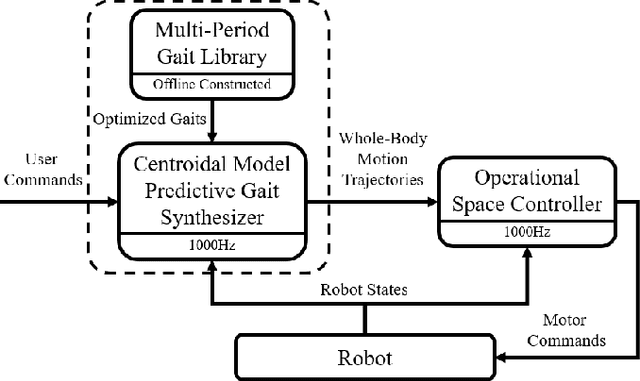

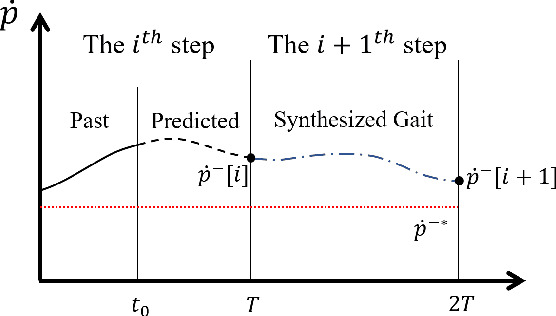
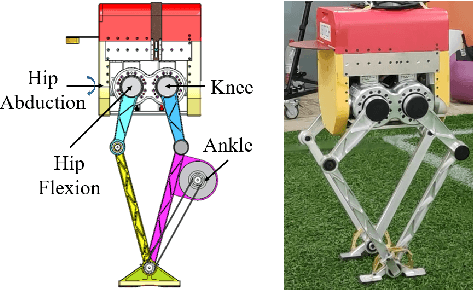
The planning of whole-body motion and step time for bipedal locomotion is constructed as a model predictive control (MPC) problem, in which a sequence of optimization problems need to be solved online. While directly solving these problems is extremely time-consuming, we propose a predictive gait synthesizer to solve them quickly online. Based on the full dimensional model, a library of gaits with different speeds and periods is first constructed offline. Then the proposed gait synthesizer generates real-time gaits by synthesizing the gait library based on the online prediction of centroidal dynamics. We prove that the generated gaits are feasible solutions of the MPC optimization problems. Thus our proposed gait synthesizer works as a fast MPC-style planner to guarantee the feasibility and stability of the full dimensional robot. Simulation and experimental results on an 8 degrees of freedom (DoF) bipedal robot are provided to show the performance and robustness of this approach for walking and standing.