 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging Online Olympiad-Level Math Problems for LLMs Training and Contamination-Resistant Evaluation
Jan 24, 2025Advances in Large Language Models (LLMs) have sparked interest in their ability to solve Olympiad-level math problems. However, the training and evaluation of these models are constrained by the limited size and quality of available datasets, as creating large-scale data for such advanced problems requires extensive effort from human experts. In addition, current benchmarks are prone to contamination, leading to unreliable evaluations. In this paper, we present an automated pipeline that leverages the rich resources of the Art of Problem Solving (AoPS) forum, which predominantly features Olympiad-level problems and community-driven solutions. Using open-source LLMs, we develop a method to extract question-answer pairs from the forum, resulting in AoPS-Instruct, a dataset of more than 600,000 high-quality QA pairs. Our experiments demonstrate that fine-tuning LLMs on AoPS-Instruct improves their reasoning abilities across various benchmarks. Moreover, we build an automatic pipeline that introduces LiveAoPSBench, an evolving evaluation set with timestamps, derived from the latest forum data, providing a contamination-resistant benchmark for assessing LLM performance. Notably, we observe a significant decline in LLM performance over time, suggesting their success on older examples may stem from pre-training exposure rather than true reasoning ability. Our work presents a scalable approach to creating and maintaining large-scale, high-quality datasets for advanced math reasoning, offering valuable insights into the capabilities and limitations of LLMs in this domain. Our benchmark and code is available at https://github.com/DSL-Lab/aops
MinerU: An Open-Source Solution for Precise Document Content Extraction
Sep 27, 2024



Document content analysis has been a crucial research area in computer vision. Despite significant advancements in methods such as OCR, layout detection, and formula recognition, existing open-source solutions struggle to consistently deliver high-quality content extraction due to the diversity in document types and content. To address these challenges, we present MinerU, an open-source solution for high-precision document content extraction. MinerU leverages the sophisticated PDF-Extract-Kit models to extract content from diverse documents effectively and employs finely-tuned preprocessing and postprocessing rules to ensure the accuracy of the final results. Experimental results demonstrate that MinerU consistently achieves high performance across various document types, significantly enhancing the quality and consistency of content extraction. The MinerU open-source project is available at https://github.com/opendatalab/MinerU.
InternLM2 Technical Report
Mar 26, 2024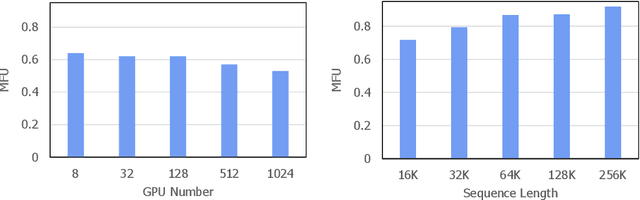
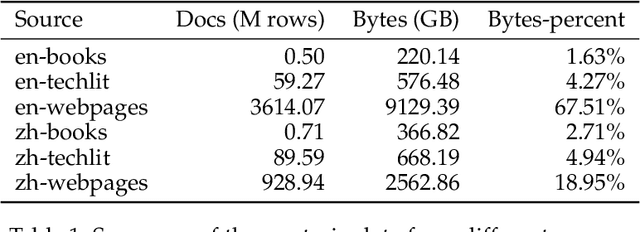
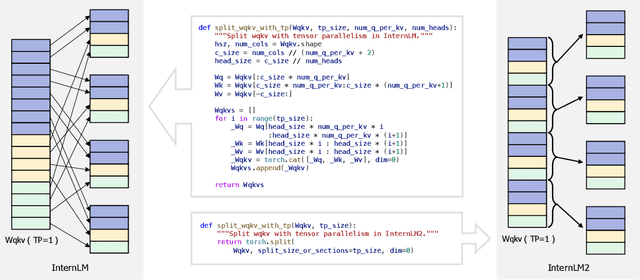

The evolution of Large Language Models (LLMs) like ChatGPT and GPT-4 has sparked discussions on the advent of Artificial General Intelligence (AGI). However, replicating such advancements in open-source models has been challenging. This paper introduces InternLM2, an open-source LLM that outperforms its predecessors in comprehensive evaluations across 6 dimensions and 30 benchmarks, long-context modeling, and open-ended subjective evaluations through innovative pre-training and optimization techniques. The pre-training process of InternLM2 is meticulously detailed, highlighting the preparation of diverse data types including text, code, and long-context data. InternLM2 efficiently captures long-term dependencies, initially trained on 4k tokens before advancing to 32k tokens in pre-training and fine-tuning stages, exhibiting remarkable performance on the 200k ``Needle-in-a-Haystack" test. InternLM2 is further aligned using Supervised Fine-Tuning (SFT) and a novel Conditional Online Reinforcement Learning from Human Feedback (COOL RLHF) strategy that addresses conflicting human preferences and reward hacking. By releasing InternLM2 models in different training stages and model sizes, we provide the community with insights into the model's evolution.
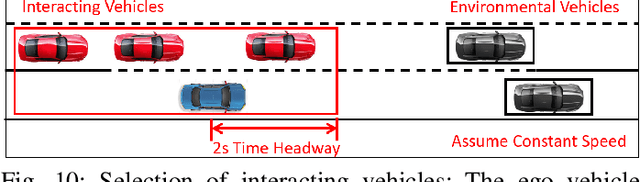
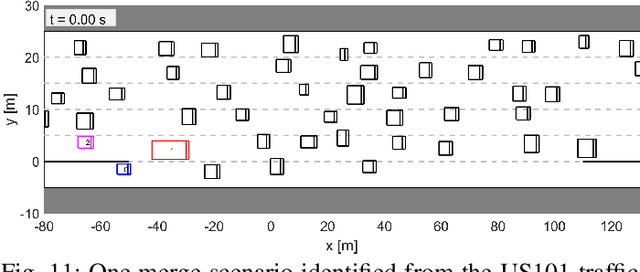
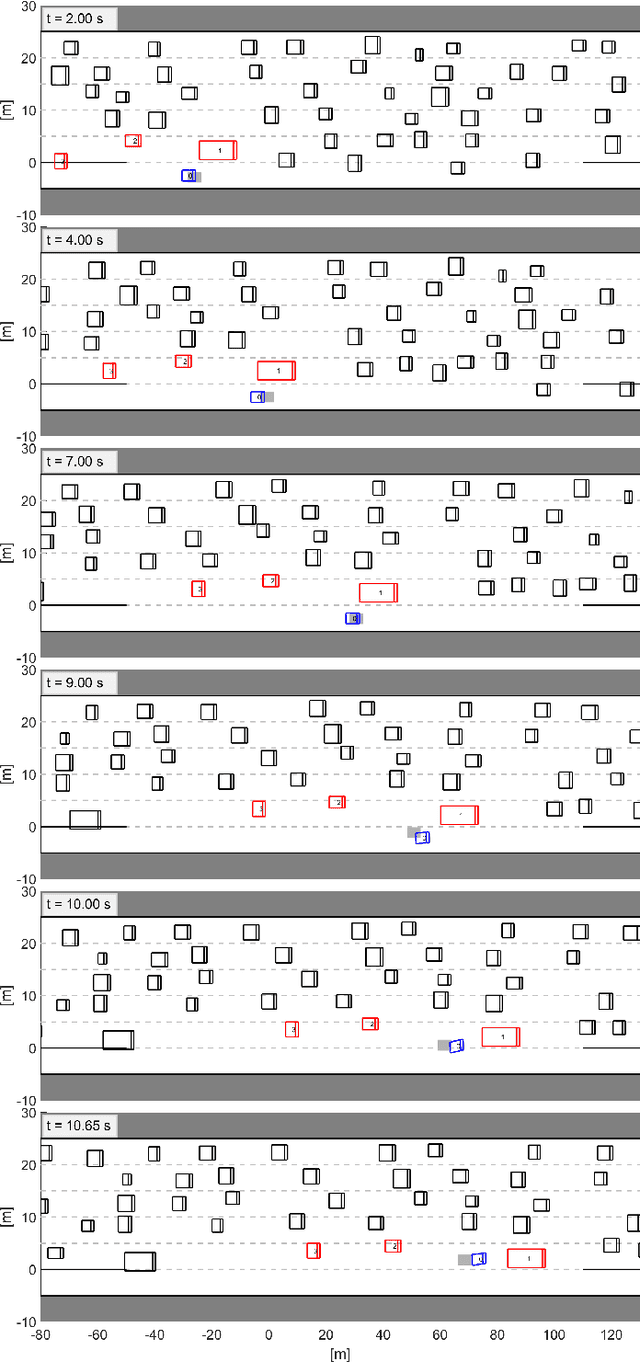
Decision-Making for Autonomous Vehicles with Interaction-Aware Behavioral Prediction and Social-Attention Neural Network
Nov 01, 2023



Autonomous vehicles need to accomplish their tasks while interacting with human drivers in traffic. It is thus crucial to equip autonomous vehicles with artificial reasoning to better comprehend the intentions of the surrounding traffic, thereby facilitating the accomplishments of the tasks. In this work, we propose a behavioral model that encodes drivers' interacting intentions into latent social-psychological parameters. Leveraging a Bayesian filter, we develop a receding-horizon optimization-based controller for autonomous vehicle decision-making which accounts for the uncertainties in the interacting drivers' intentions. For online deployment, we design a neural network architecture based on the attention mechanism which imitates the behavioral model with online estimated parameter priors. We also propose a decision tree search algorithm to solve the decision-making problem online. The proposed behavioral model is then evaluated in terms of its capabilities for real-world trajectory prediction. We further conduct extensive evaluations of the proposed decision-making module, in forced highway merging scenarios, using both simulated environments and real-world traffic datasets. The results demonstrate that our algorithms can complete the forced merging tasks in various traffic conditions while ensuring driving safety.
Interaction-Aware Decision-Making for Autonomous Vehicles in Forced Merging Scenario Leveraging Social Psychology Factors
Sep 25, 2023



Understanding the intention of vehicles in the surrounding traffic is crucial for an autonomous vehicle to successfully accomplish its driving tasks in complex traffic scenarios such as highway forced merging. In this paper, we consider a behavioral model that incorporates both social behaviors and personal objectives of the interacting drivers. Leveraging this model, we develop a receding-horizon control-based decision-making strategy, that estimates online the other drivers' intentions using Bayesian filtering and incorporates predictions of nearby vehicles' behaviors under uncertain intentions. The effectiveness of the proposed decision-making strategy is demonstrated and evaluated based on simulation studies in comparison with a game theoretic controller and a real-world traffic dataset.
Interaction-Aware Trajectory Prediction and Planning for Autonomous Vehicles in Forced Merge Scenarios
Dec 14, 2021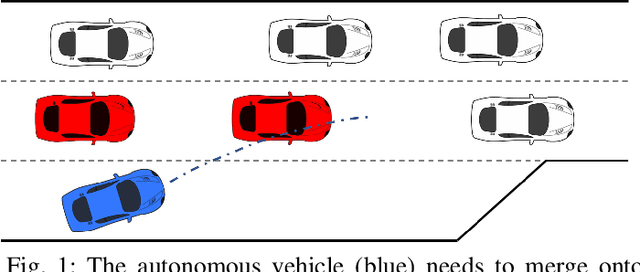
Merging is, in general, a challenging task for both human drivers and autonomous vehicles, especially in dense traffic, because the merging vehicle typically needs to interact with other vehicles to identify or create a gap and safely merge into. In this paper, we consider the problem of autonomous vehicle control for forced merge scenarios. We propose a novel game-theoretic controller, called the Leader-Follower Game Controller (LFGC), in which the interactions between the autonomous ego vehicle and other vehicles with a priori uncertain driving intentions is modeled as a partially observable leader-follower game. The LFGC estimates the other vehicles' intentions online based on observed trajectories, and then predicts their future trajectories and plans the ego vehicle's own trajectory using Model Predictive Control (MPC) to simultaneously achieve probabilistically guaranteed safety and merging objectives. To verify the performance of LFGC, we test it in simulations and with the NGSIM data, where the LFGC demonstrates a high success rate of 97.5% in merging.
Safe Learning Reference Governor for Constrained Systems with Application to Fuel Truck Rollover Avoidance
Jan 22, 2021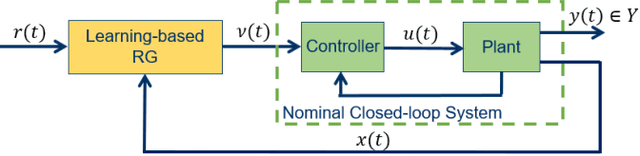
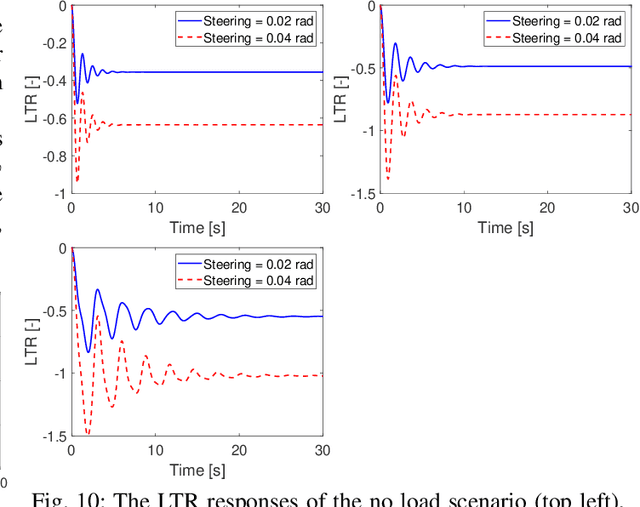
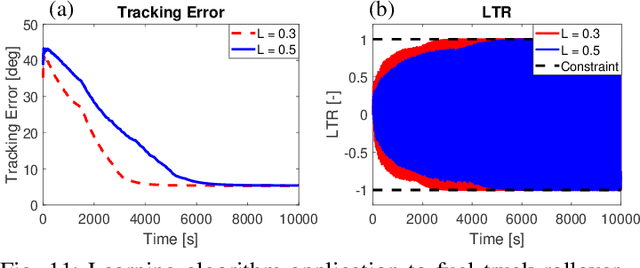
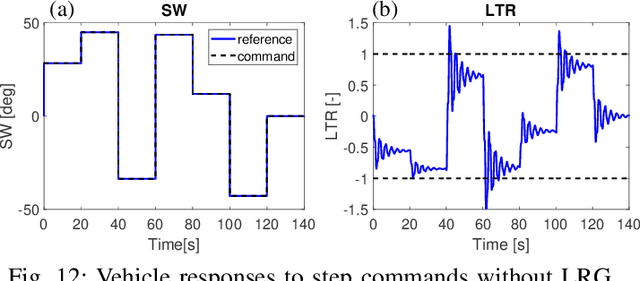
This paper proposes a learning reference governor (LRG) approach to enforce state and control constraints in systems for which an accurate model is unavailable; and this approach enables the reference governor to gradually improve command tracking performance through learning while enforcing the constraints during learning and after learning is completed. The learning can be performed either on a black-box type model of the system or directly on the hardware. After introducing the LRG algorithm and outlining its theoretical properties, this paper investigates LRG application to fuel truck rollover avoidance. Through simulations based on a fuel truck model that accounts for liquid fuel sloshing effects, we show that the proposed LRG can effectively protect fuel trucks from rollover accidents under various operating conditions.