 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl Invariant Sets for Neural Network Dynamical Systems and Recursive Feasibility in Model Predictive Control
May 15, 2025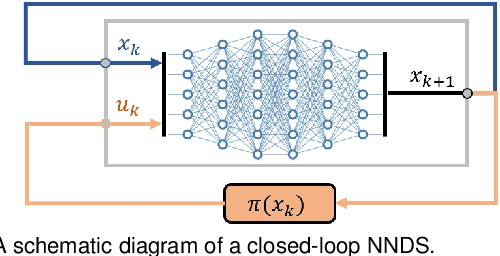
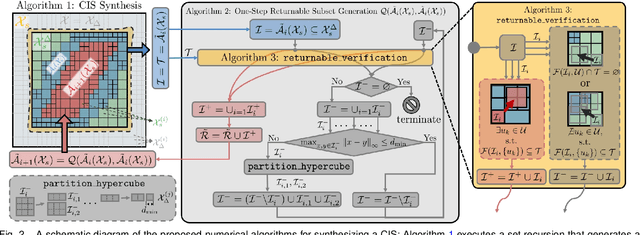
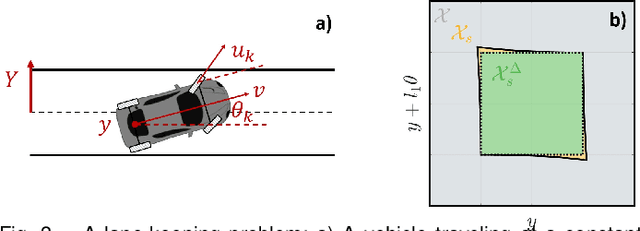
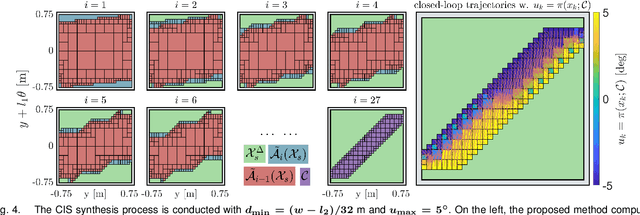
Neural networks are powerful tools for data-driven modeling of complex dynamical systems, enhancing predictive capability for control applications. However, their inherent nonlinearity and black-box nature challenge control designs that prioritize rigorous safety and recursive feasibility guarantees. This paper presents algorithmic methods for synthesizing control invariant sets specifically tailored to neural network based dynamical models. These algorithms employ set recursion, ensuring termination after a finite number of iterations and generating subsets in which closed-loop dynamics are forward invariant, thus guaranteeing perpetual operational safety. Additionally, we propose model predictive control designs that integrate these control invariant sets into mixed-integer optimization, with guaranteed adherence to safety constraints and recursive feasibility at the computational level. We also present a comprehensive theoretical analysis examining the properties and guarantees of the proposed methods. Numerical simulations in an autonomous driving scenario demonstrate the methods' effectiveness in synthesizing control-invariant sets offline and implementing model predictive control online, ensuring safety and recursive feasibility.
A Survey of Reinforcement Learning-Based Motion Planning for Autonomous Driving: Lessons Learned from a Driving Task Perspective
Mar 31, 2025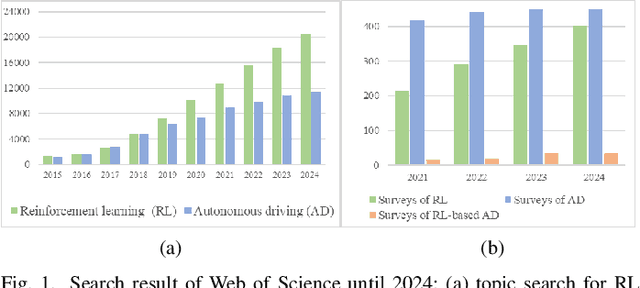
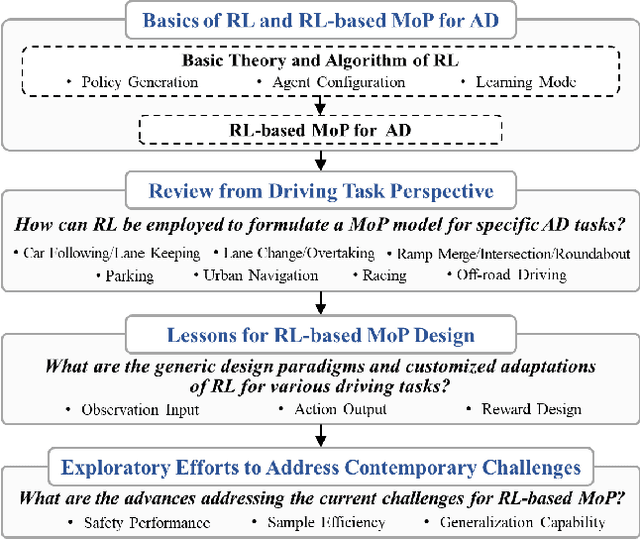
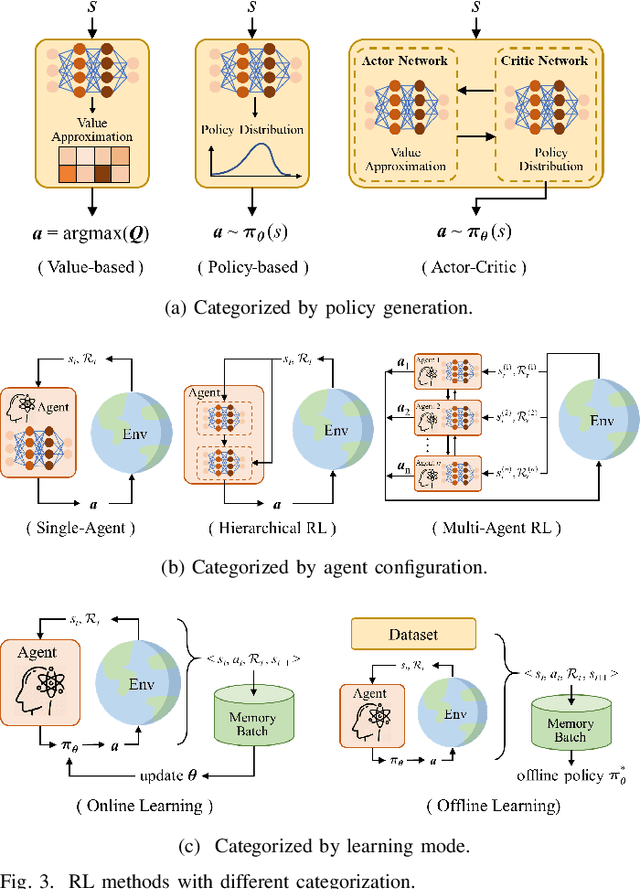
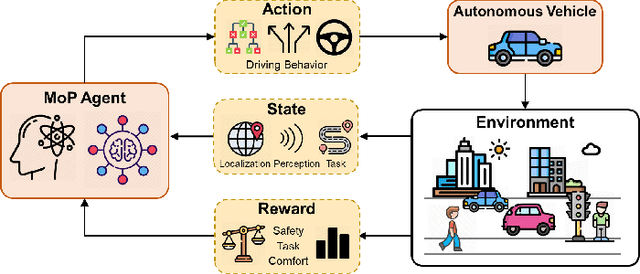
Reinforcement learning (RL), with its ability to explore and optimize policies in complex, dynamic decision-making tasks, has emerged as a promising approach to addressing motion planning (MoP) challenges in autonomous driving (AD). Despite rapid advancements in RL and AD, a systematic description and interpretation of the RL design process tailored to diverse driving tasks remains underdeveloped. This survey provides a comprehensive review of RL-based MoP for AD, focusing on lessons from task-specific perspectives. We first outline the fundamentals of RL methodologies, and then survey their applications in MoP, analyzing scenario-specific features and task requirements to shed light on their influence on RL design choices. Building on this analysis, we summarize key design experiences, extract insights from various driving task applications, and provide guidance for future implementations. Additionally, we examine the frontier challenges in RL-based MoP, review recent efforts to addresse these challenges, and propose strategies for overcoming unresolved issues.
Learning Hamiltonian Dynamics with Bayesian Data Assimilation
Jan 31, 2025



In this paper, we develop a neural network-based approach for time-series prediction in unknown Hamiltonian dynamical systems. Our approach leverages a surrogate model and learns the system dynamics using generalized coordinates (positions) and their conjugate momenta while preserving a constant Hamiltonian. To further enhance long-term prediction accuracy, we introduce an Autoregressive Hamiltonian Neural Network, which incorporates autoregressive prediction errors into the training objective. Additionally, we employ Bayesian data assimilation to refine predictions in real-time using online measurement data. Numerical experiments on a spring-mass system and highly elliptic orbits under gravitational perturbations demonstrate the effectiveness of the proposed method, highlighting its potential for accurate and robust long-term predictions.
Constrained Control for Autonomous Spacecraft Rendezvous: Learning-Based Time Shift Governor
Dec 07, 2024



This paper develops a Time Shift Governor (TSG)-based control scheme to enforce constraints during rendezvous and docking (RD) missions in the setting of the Two-Body problem. As an add-on scheme to the nominal closed-loop system, the TSG generates a time-shifted Chief spacecraft trajectory as a target reference for the Deputy spacecraft. This modification of the commanded reference trajectory ensures that constraints are enforced while the time shift is reduced to zero to effect the rendezvous. Our approach to TSG implementation integrates an LSTM neural network which approximates the time shift parameter as a function of a sequence of past Deputy and Chief spacecraft states. This LSTM neural network is trained offline from simulation data. We report simulation results for RD missions in the Low Earth Orbit (LEO) and on the Molniya orbit to demonstrate the effectiveness of the proposed control scheme. The proposed scheme reduces the time to compute the time shift parameter in most of the scenarios and successfully completes rendezvous missions.
Safe Adaptive Cruise Control Under Perception Uncertainty: A Deep Ensemble and Conformal Tube Model Predictive Control Approach
Dec 05, 2024



Autonomous driving heavily relies on perception systems to interpret the environment for decision-making. To enhance robustness in these safety critical applications, this paper considers a Deep Ensemble of Deep Neural Network regressors integrated with Conformal Prediction to predict and quantify uncertainties. In the Adaptive Cruise Control setting, the proposed method performs state and uncertainty estimation from RGB images, informing the downstream controller of the DNN perception uncertainties. An adaptive cruise controller using Conformal Tube Model Predictive Control is designed to ensure probabilistic safety. Evaluations with a high-fidelity simulator demonstrate the algorithm's effectiveness in speed tracking and safe distance maintaining, including in Out-Of-Distribution scenarios.
CIKAN: Constraint Informed Kolmogorov-Arnold Networks for Autonomous Spacecraft Rendezvous using Time Shift Governor
Dec 04, 2024



The paper considers a Constrained-Informed Neural Network (CINN) approximation for the Time Shift Governor (TSG), which is an add-on scheme to the nominal closed-loop system used to enforce constraints by time-shifting the reference trajectory in spacecraft rendezvous applications. We incorporate Kolmogorov-Arnold Networks (KANs), an emerging architecture in the AI community, as a fundamental component of CINN and propose a Constrained-Informed Kolmogorov-Arnold Network (CIKAN)-based approximation for TSG. We demonstrate the effectiveness of the CIKAN-based TSG through simulations of constrained spacecraft rendezvous missions on highly elliptic orbits and present comparisons between CIKANs, MLP-based CINNs, and the conventional TSG.
Time Shift Governor for Constrained Control of Spacecraft Orbit and Attitude Relative Motion in Bicircular Restricted Four-Body Problem
Jul 15, 2024



This paper considers constrained spacecraft rendezvous and docking (RVD) in the setting of the Bicircular Restricted Four-Body Problem (BCR4BP), while accounting for attitude dynamics. We consider Line of Sight (LoS) cone constraints, thrust limits, thrust direction limits, and approach velocity constraints during RVD missions in a near rectilinear halo orbit (NRHO) in the Sun-Earth-Moon system. To enforce the constraints, the Time Shift Governor (TSG), which uses a time-shifted Chief spacecraft trajectory as a target reference for the Deputy spacecraft, is employed. The time shift is gradually reduced to zero so that the virtual target gradually evolves towards the Chief spacecraft as time goes by, and the RVD mission objective can be achieved. Numerical simulation results are reported to validate the proposed control method.
Autonomous Driving With Perception Uncertainties: Deep-Ensemble Based Adaptive Cruise Control
Mar 22, 2024



Autonomous driving depends on perception systems to understand the environment and to inform downstream decision-making. While advanced perception systems utilizing black-box Deep Neural Networks (DNNs) demonstrate human-like comprehension, their unpredictable behavior and lack of interpretability may hinder their deployment in safety critical scenarios. In this paper, we develop an Ensemble of DNN regressors (Deep Ensemble) that generates predictions with quantification of prediction uncertainties. In the scenario of Adaptive Cruise Control (ACC), we employ the Deep Ensemble to estimate distance headway to the lead vehicle from RGB images and enable the downstream controller to account for the estimation uncertainty. We develop an adaptive cruise controller that utilizes Stochastic Model Predictive Control (MPC) with chance constraints to provide a probabilistic safety guarantee. We evaluate our ACC algorithm using a high-fidelity traffic simulator and a real-world traffic dataset and demonstrate the ability of the proposed approach to effect speed tracking and car following while maintaining a safe distance headway. The out-of-distribution scenarios are also examined.
System-level Safety Guard: Safe Tracking Control through Uncertain Neural Network Dynamics Models
Dec 11, 2023


The Neural Network (NN), as a black-box function approximator, has been considered in many control and robotics applications. However, difficulties in verifying the overall system safety in the presence of uncertainties hinder the modular deployment of NN in safety-critical systems. In this paper, we leverage the NNs as predictive models for trajectory tracking of unknown dynamical systems. We consider controller design in the presence of both intrinsic uncertainty and uncertainties from other system modules. In this setting, we formulate the constrained trajectory tracking problem and show that it can be solved using Mixed-integer Linear Programming (MILP). The proposed MILP-based solution enjoys a provable safety guarantee for the overall system, and the approach is empirically demonstrated in robot navigation and obstacle avoidance through simulations. The demonstration videos are available at https://xiaolisean.github.io/publication/2023-11-01-L4DC2024.
Decision-Making for Autonomous Vehicles with Interaction-Aware Behavioral Prediction and Social-Attention Neural Network
Nov 01, 2023



Autonomous vehicles need to accomplish their tasks while interacting with human drivers in traffic. It is thus crucial to equip autonomous vehicles with artificial reasoning to better comprehend the intentions of the surrounding traffic, thereby facilitating the accomplishments of the tasks. In this work, we propose a behavioral model that encodes drivers' interacting intentions into latent social-psychological parameters. Leveraging a Bayesian filter, we develop a receding-horizon optimization-based controller for autonomous vehicle decision-making which accounts for the uncertainties in the interacting drivers' intentions. For online deployment, we design a neural network architecture based on the attention mechanism which imitates the behavioral model with online estimated parameter priors. We also propose a decision tree search algorithm to solve the decision-making problem online. The proposed behavioral model is then evaluated in terms of its capabilities for real-world trajectory prediction. We further conduct extensive evaluations of the proposed decision-making module, in forced highway merging scenarios, using both simulated environments and real-world traffic datasets. The results demonstrate that our algorithms can complete the forced merging tasks in various traffic conditions while ensuring driving safety.