 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Learning Reference Governor for Constrained Systems with Application to Fuel Truck Rollover Avoidance
Paper and Code
Jan 22, 2021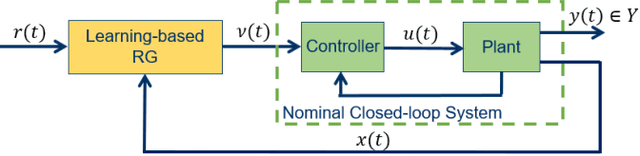
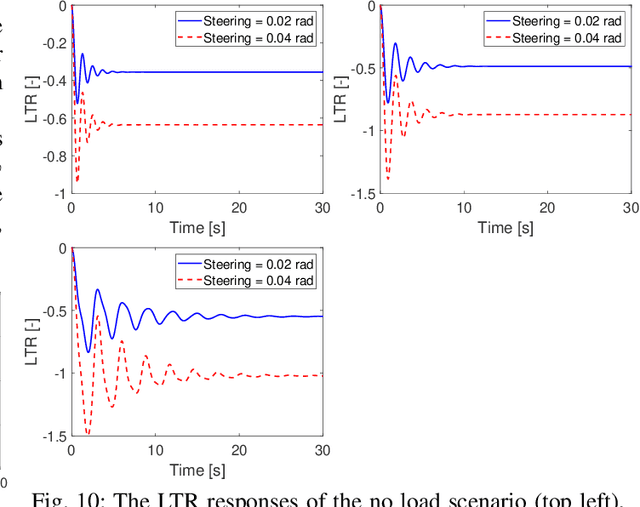
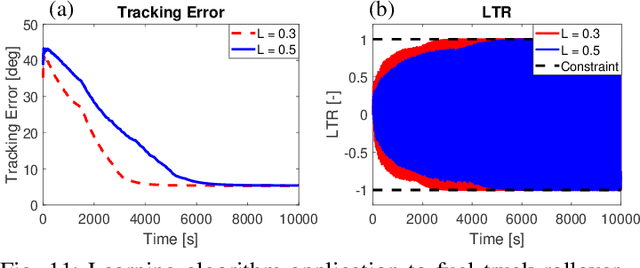
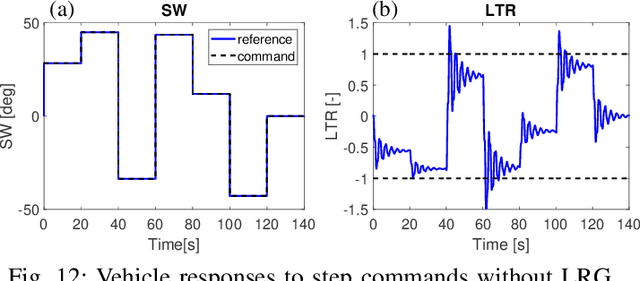
This paper proposes a learning reference governor (LRG) approach to enforce state and control constraints in systems for which an accurate model is unavailable; and this approach enables the reference governor to gradually improve command tracking performance through learning while enforcing the constraints during learning and after learning is completed. The learning can be performed either on a black-box type model of the system or directly on the hardware. After introducing the LRG algorithm and outlining its theoretical properties, this paper investigates LRG application to fuel truck rollover avoidance. Through simulations based on a fuel truck model that accounts for liquid fuel sloshing effects, we show that the proposed LRG can effectively protect fuel trucks from rollover accidents under various operating conditions.