 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeXGrid-Mapping: Explicit Implicit Hybrid Grid Submaps for Efficient Incremental Neural LiDAR Mapping
Dec 24, 2025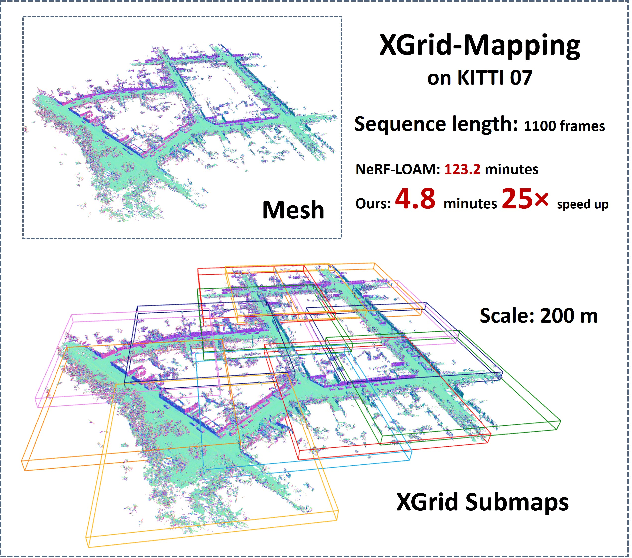
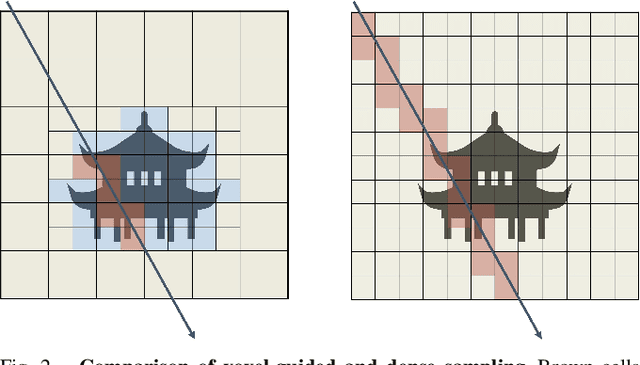
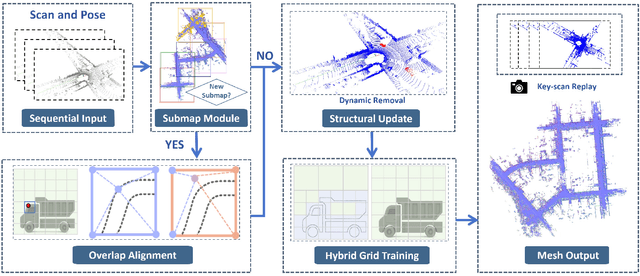
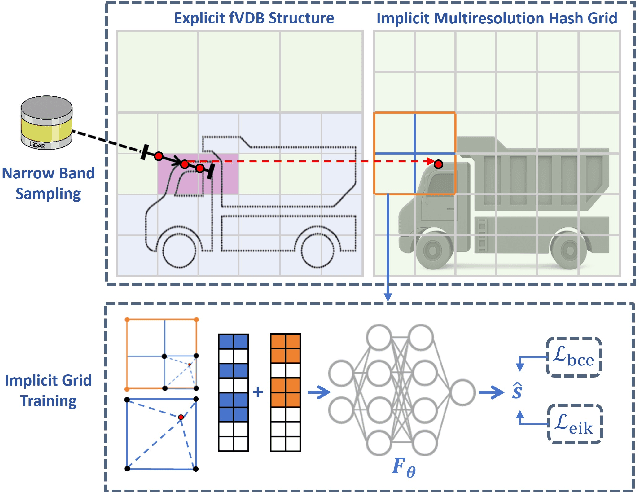
Large-scale incremental mapping is fundamental to the development of robust and reliable autonomous systems, as it underpins incremental environmental understanding with sequential inputs for navigation and decision-making. LiDAR is widely used for this purpose due to its accuracy and robustness. Recently, neural LiDAR mapping has shown impressive performance; however, most approaches rely on dense implicit representations and underutilize geometric structure, while existing voxel-guided methods struggle to achieve real-time performance. To address these challenges, we propose XGrid-Mapping, a hybrid grid framework that jointly exploits explicit and implicit representations for efficient neural LiDAR mapping. Specifically, the strategy combines a sparse grid, providing geometric priors and structural guidance, with an implicit dense grid that enriches scene representation. By coupling the VDB structure with a submap-based organization, the framework reduces computational load and enables efficient incremental mapping on a large scale. To mitigate discontinuities across submaps, we introduce a distillation-based overlap alignment strategy, in which preceding submaps supervise subsequent ones to ensure consistency in overlapping regions. To further enhance robustness and sampling efficiency, we incorporate a dynamic removal module. Extensive experiments show that our approach delivers superior mapping quality while overcoming the efficiency limitations of voxel-guided methods, thereby outperforming existing state-of-the-art mapping methods.
SAIL-Recon: Large SfM by Augmenting Scene Regression with Localization
Aug 25, 2025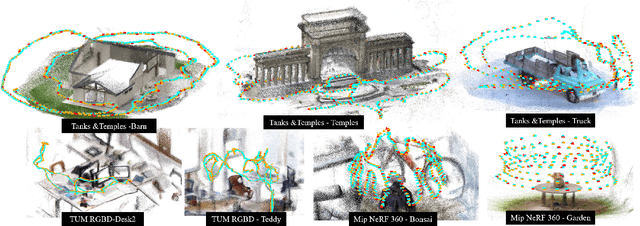
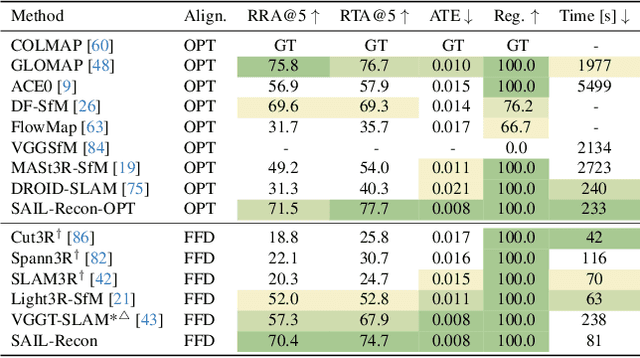
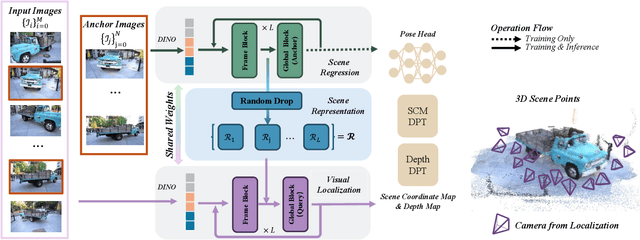
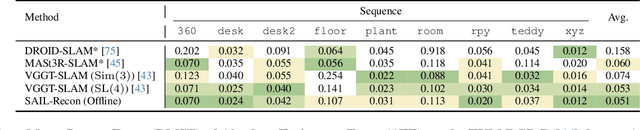
Scene regression methods, such as VGGT, solve the Structure-from-Motion (SfM) problem by directly regressing camera poses and 3D scene structures from input images. They demonstrate impressive performance in handling images under extreme viewpoint changes. However, these methods struggle to handle a large number of input images. To address this problem, we introduce SAIL-Recon, a feed-forward Transformer for large scale SfM, by augmenting the scene regression network with visual localization capabilities. Specifically, our method first computes a neural scene representation from a subset of anchor images. The regression network is then fine-tuned to reconstruct all input images conditioned on this neural scene representation. Comprehensive experiments show that our method not only scales efficiently to large-scale scenes, but also achieves state-of-the-art results on both camera pose estimation and novel view synthesis benchmarks, including TUM-RGBD, CO3Dv2, and Tanks & Temples. We will publish our model and code. Code and models are publicly available at: https://hkust-sail.github.io/ sail-recon/.
Acquire and then Adapt: Squeezing out Text-to-Image Model for Image Restoration
Apr 21, 2025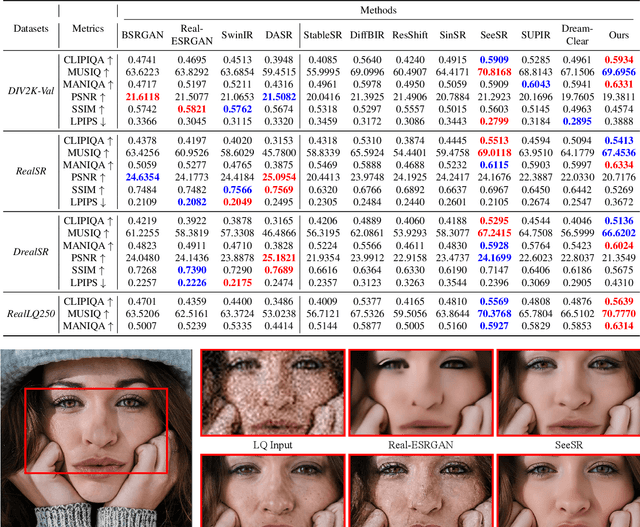
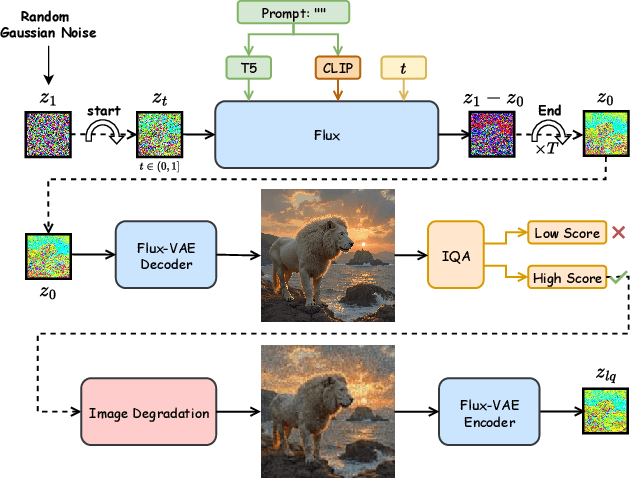
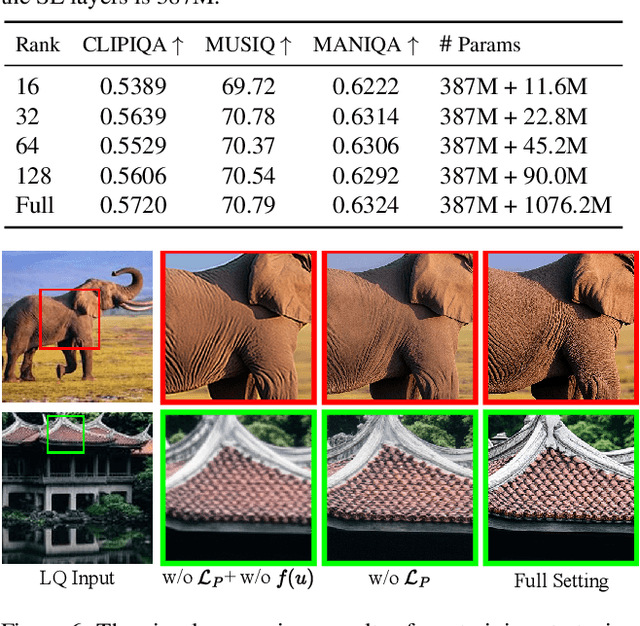
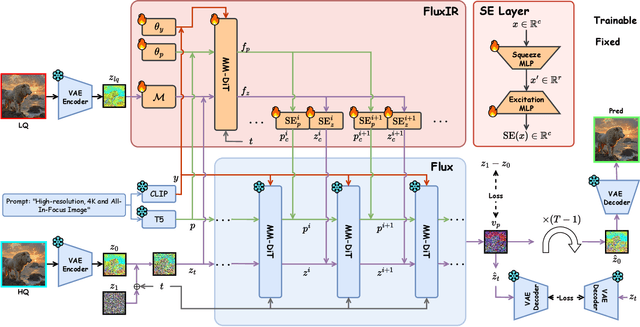
Recently, pre-trained text-to-image (T2I) models have been extensively adopted for real-world image restoration because of their powerful generative prior. However, controlling these large models for image restoration usually requires a large number of high-quality images and immense computational resources for training, which is costly and not privacy-friendly. In this paper, we find that the well-trained large T2I model (i.e., Flux) is able to produce a variety of high-quality images aligned with real-world distributions, offering an unlimited supply of training samples to mitigate the above issue. Specifically, we proposed a training data construction pipeline for image restoration, namely FluxGen, which includes unconditional image generation, image selection, and degraded image simulation. A novel light-weighted adapter (FluxIR) with squeeze-and-excitation layers is also carefully designed to control the large Diffusion Transformer (DiT)-based T2I model so that reasonable details can be restored. Experiments demonstrate that our proposed method enables the Flux model to adapt effectively to real-world image restoration tasks, achieving superior scores and visual quality on both synthetic and real-world degradation datasets - at only about 8.5\% of the training cost compared to current approaches.
DrivingWorld: Constructing World Model for Autonomous Driving via Video GPT
Dec 30, 2024



Recent successes in autoregressive (AR) generation models, such as the GPT series in natural language processing, have motivated efforts to replicate this success in visual tasks. Some works attempt to extend this approach to autonomous driving by building video-based world models capable of generating realistic future video sequences and predicting ego states. However, prior works tend to produce unsatisfactory results, as the classic GPT framework is designed to handle 1D contextual information, such as text, and lacks the inherent ability to model the spatial and temporal dynamics essential for video generation. In this paper, we present DrivingWorld, a GPT-style world model for autonomous driving, featuring several spatial-temporal fusion mechanisms. This design enables effective modeling of both spatial and temporal dynamics, facilitating high-fidelity, long-duration video generation. Specifically, we propose a next-state prediction strategy to model temporal coherence between consecutive frames and apply a next-token prediction strategy to capture spatial information within each frame. To further enhance generalization ability, we propose a novel masking strategy and reweighting strategy for token prediction to mitigate long-term drifting issues and enable precise control. Our work demonstrates the ability to produce high-fidelity and consistent video clips of over 40 seconds in duration, which is over 2 times longer than state-of-the-art driving world models. Experiments show that, in contrast to prior works, our method achieves superior visual quality and significantly more accurate controllable future video generation. Our code is available at https://github.com/YvanYin/DrivingWorld.
DrivingWorld: ConstructingWorld Model for Autonomous Driving via Video GPT
Dec 27, 2024Recent successes in autoregressive (AR) generation models, such as the GPT series in natural language processing, have motivated efforts to replicate this success in visual tasks. Some works attempt to extend this approach to autonomous driving by building video-based world models capable of generating realistic future video sequences and predicting ego states. However, prior works tend to produce unsatisfactory results, as the classic GPT framework is designed to handle 1D contextual information, such as text, and lacks the inherent ability to model the spatial and temporal dynamics essential for video generation. In this paper, we present DrivingWorld, a GPT-style world model for autonomous driving, featuring several spatial-temporal fusion mechanisms. This design enables effective modeling of both spatial and temporal dynamics, facilitating high-fidelity, long-duration video generation. Specifically, we propose a next-state prediction strategy to model temporal coherence between consecutive frames and apply a next-token prediction strategy to capture spatial information within each frame. To further enhance generalization ability, we propose a novel masking strategy and reweighting strategy for token prediction to mitigate long-term drifting issues and enable precise control. Our work demonstrates the ability to produce high-fidelity and consistent video clips of over 40 seconds in duration, which is over 2 times longer than state-of-the-art driving world models. Experiments show that, in contrast to prior works, our method achieves superior visual quality and significantly more accurate controllable future video generation. Our code is available at https://github.com/YvanYin/DrivingWorld.
360Recon: An Accurate Reconstruction Method Based on Depth Fusion from 360 Images
Nov 28, 2024



360-degree images offer a significantly wider field of view compared to traditional pinhole cameras, enabling sparse sampling and dense 3D reconstruction in low-texture environments. This makes them crucial for applications in VR, AR, and related fields. However, the inherent distortion caused by the wide field of view affects feature extraction and matching, leading to geometric consistency issues in subsequent multi-view reconstruction. In this work, we propose 360Recon, an innovative MVS algorithm for ERP images. The proposed spherical feature extraction module effectively mitigates distortion effects, and by combining the constructed 3D cost volume with multi-scale enhanced features from ERP images, our approach achieves high-precision scene reconstruction while preserving local geometric consistency. Experimental results demonstrate that 360Recon achieves state-of-the-art performance and high efficiency in depth estimation and 3D reconstruction on existing public panoramic reconstruction datasets.
Boost 3D Reconstruction using Diffusion-based Monocular Camera Calibration
Nov 26, 2024



In this paper, we present DM-Calib, a diffusion-based approach for estimating pinhole camera intrinsic parameters from a single input image. Monocular camera calibration is essential for many 3D vision tasks. However, most existing methods depend on handcrafted assumptions or are constrained by limited training data, resulting in poor generalization across diverse real-world images. Recent advancements in stable diffusion models, trained on massive data, have shown the ability to generate high-quality images with varied characteristics. Emerging evidence indicates that these models implicitly capture the relationship between camera focal length and image content. Building on this insight, we explore how to leverage the powerful priors of diffusion models for monocular pinhole camera calibration. Specifically, we introduce a new image-based representation, termed Camera Image, which losslessly encodes the numerical camera intrinsics and integrates seamlessly with the diffusion framework. Using this representation, we reformulate the problem of estimating camera intrinsics as the generation of a dense Camera Image conditioned on an input image. By fine-tuning a stable diffusion model to generate a Camera Image from a single RGB input, we can extract camera intrinsics via a RANSAC operation. We further demonstrate that our monocular calibration method enhances performance across various 3D tasks, including zero-shot metric depth estimation, 3D metrology, pose estimation and sparse-view reconstruction. Extensive experiments on multiple public datasets show that our approach significantly outperforms baselines and provides broad benefits to 3D vision tasks. Code is available at https://github.com/JunyuanDeng/DM-Calib.
Suite-IN: Aggregating Motion Features from Apple Suite for Robust Inertial Navigation
Nov 12, 2024



With the rapid development of wearable technology, devices like smartphones, smartwatches, and headphones equipped with IMUs have become essential for applications such as pedestrian positioning. However, traditional pedestrian dead reckoning (PDR) methods struggle with diverse motion patterns, while recent data-driven approaches, though improving accuracy, often lack robustness due to reliance on a single device.In our work, we attempt to enhance the positioning performance using the low-cost commodity IMUs embedded in the wearable devices. We propose a multi-device deep learning framework named Suite-IN, aggregating motion data from Apple Suite for inertial navigation. Motion data captured by sensors on different body parts contains both local and global motion information, making it essential to reduce the negative effects of localized movements and extract global motion representations from multiple devices.
Thermal-NeRF: Neural Radiance Fields from an Infrared Camera
Mar 15, 2024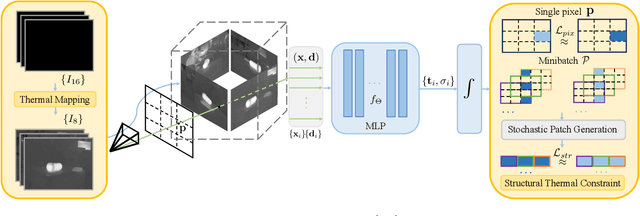
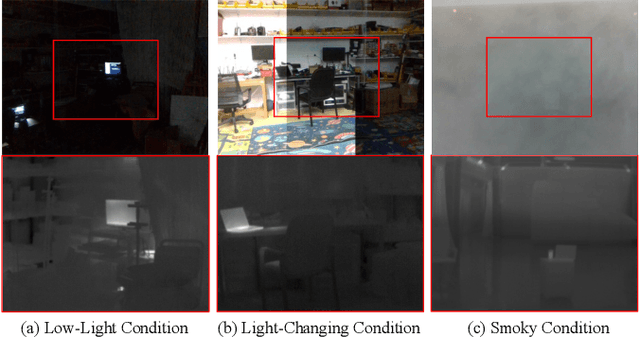
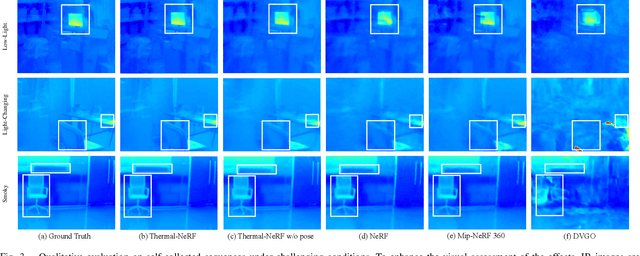

In recent years, Neural Radiance Fields (NeRFs) have demonstrated significant potential in encoding highly-detailed 3D geometry and environmental appearance, positioning themselves as a promising alternative to traditional explicit representation for 3D scene reconstruction. However, the predominant reliance on RGB imaging presupposes ideal lighting conditions: a premise frequently unmet in robotic applications plagued by poor lighting or visual obstructions. This limitation overlooks the capabilities of infrared (IR) cameras, which excel in low-light detection and present a robust alternative under such adverse scenarios. To tackle these issues, we introduce Thermal-NeRF, the first method that estimates a volumetric scene representation in the form of a NeRF solely from IR imaging. By leveraging a thermal mapping and structural thermal constraint derived from the thermal characteristics of IR imaging, our method showcasing unparalleled proficiency in recovering NeRFs in visually degraded scenes where RGB-based methods fall short. We conduct extensive experiments to demonstrate that Thermal-NeRF can achieve superior quality compared to existing methods. Furthermore, we contribute a dataset for IR-based NeRF applications, paving the way for future research in IR NeRF reconstruction.
NeRF-LOAM: Neural Implicit Representation for Large-Scale Incremental LiDAR Odometry and Mapping
Mar 19, 2023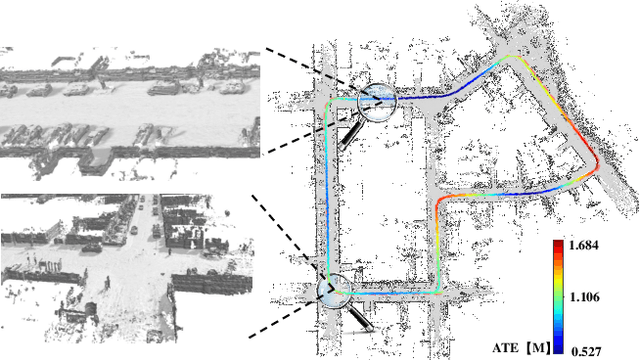

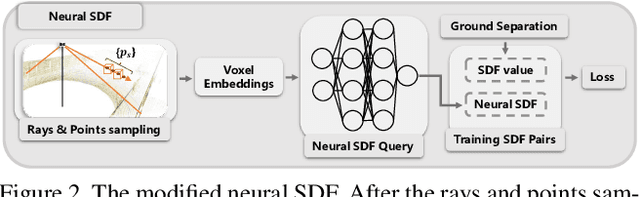

Simultaneously odometry and mapping using LiDAR data is an important task for mobile systems to achieve full autonomy in large-scale environments. However, most existing LiDAR-based methods prioritize tracking quality over reconstruction quality. Although the recently developed neural radiance fields (NeRF) have shown promising advances in implicit reconstruction for indoor environments, the problem of simultaneous odometry and mapping for large-scale scenarios using incremental LiDAR data remains unexplored. To bridge this gap, in this paper, we propose a novel NeRF-based LiDAR odometry and mapping approach, NeRF-LOAM, consisting of three modules neural odometry, neural mapping, and mesh reconstruction. All these modules utilize our proposed neural signed distance function, which separates LiDAR points into ground and non-ground points to reduce Z-axis drift, optimizes odometry and voxel embeddings concurrently, and in the end generates dense smooth mesh maps of the environment. Moreover, this joint optimization allows our NeRF-LOAM to be pre-trained free and exhibit strong generalization abilities when applied to different environments. Extensive evaluations on three publicly available datasets demonstrate that our approach achieves state-of-the-art odometry and mapping performance, as well as a strong generalization in large-scale environments utilizing LiDAR data. Furthermore, we perform multiple ablation studies to validate the effectiveness of our network design. The implementation of our approach will be made available at https://github.com/JunyuanDeng/NeRF-LOAM.