 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScal3R: Scalable Test-Time Training for Large-Scale 3D Reconstruction
Apr 09, 2026This paper addresses the task of large-scale 3D scene reconstruction from long video sequences. Recent feed-forward reconstruction models have shown promising results by directly regressing 3D geometry from RGB images without explicit 3D priors or geometric constraints. However, these methods often struggle to maintain reconstruction accuracy and consistency over long sequences due to limited memory capacity and the inability to effectively capture global contextual cues. In contrast, humans can naturally exploit the global understanding of the scene to inform local perception. Motivated by this, we propose a novel neural global context representation that efficiently compresses and retains long-range scene information, enabling the model to leverage extensive contextual cues for enhanced reconstruction accuracy and consistency. The context representation is realized through a set of lightweight neural sub-networks that are rapidly adapted during test time via self-supervised objectives, which substantially increases memory capacity without incurring significant computational overhead. The experiments on multiple large-scale benchmarks, including the KITTI Odometry~\cite{Geiger2012CVPR} and Oxford Spires~\cite{tao2025spires} datasets, demonstrate the effectiveness of our approach in handling ultra-large scenes, achieving leading pose accuracy and state-of-the-art 3D reconstruction accuracy while maintaining efficiency. Code is available at https://zju3dv.github.io/scal3r.
Composing Driving Worlds through Disentangled Control for Adversarial Scenario Generation
Mar 13, 2026A major challenge in autonomous driving is the "long tail" of safety-critical edge cases, which often emerge from unusual combinations of common traffic elements. Synthesizing these scenarios is crucial, yet current controllable generative models provide incomplete or entangled guidance, preventing the independent manipulation of scene structure, object identity, and ego actions. We introduce CompoSIA, a compositional driving video simulator that disentangles these traffic factors, enabling fine-grained control over diverse adversarial driving scenarios. To support controllable identity replacement of scene elements, we propose a noise-level identity injection, allowing pose-agnostic identity generation across diverse element poses, all from a single reference image. Furthermore, a hierarchical dual-branch action control mechanism is introduced to improve action controllability. Such disentangled control enables adversarial scenario synthesis-systematically combining safe elements into dangerous configurations that entangled generators cannot produce. Extensive comparisons demonstrate superior controllable generation quality over state-of-the-art baselines, with a 17% improvement in FVD for identity editing and reductions of 30% and 47% in rotation and translation errors for action control. Furthermore, downstream stress-testing reveals substantial planner failures: across editing modalities, the average collision rate of 3s increases by 173%.
LongStream: Long-Sequence Streaming Autoregressive Visual Geometry
Feb 13, 2026Long-sequence streaming 3D reconstruction remains a significant open challenge. Existing autoregressive models often fail when processing long sequences. They typically anchor poses to the first frame, which leads to attention decay, scale drift, and extrapolation errors. We introduce LongStream, a novel gauge-decoupled streaming visual geometry model for metric-scale scene reconstruction across thousands of frames. Our approach is threefold. First, we discard the first-frame anchor and predict keyframe-relative poses. This reformulates long-range extrapolation into a constant-difficulty local task. Second, we introduce orthogonal scale learning. This method fully disentangles geometry from scale estimation to suppress drift. Finally, we solve Transformer cache issues such as attention-sink reliance and long-term KV-cache contamination. We propose cache-consistent training combined with periodic cache refresh. This approach suppresses attention degradation over ultra-long sequences and reduces the gap between training and inference. Experiments show LongStream achieves state-of-the-art performance. It delivers stable, metric-scale reconstruction over kilometer-scale sequences at 18 FPS. Project Page: https://3dagentworld.github.io/longstream/
SAIL-Recon: Large SfM by Augmenting Scene Regression with Localization
Aug 25, 2025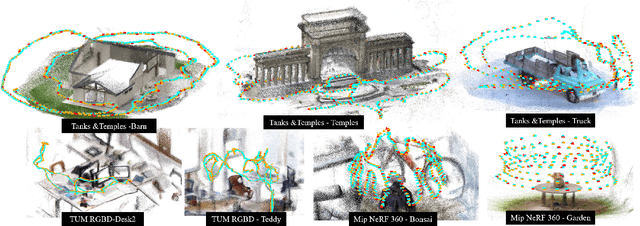
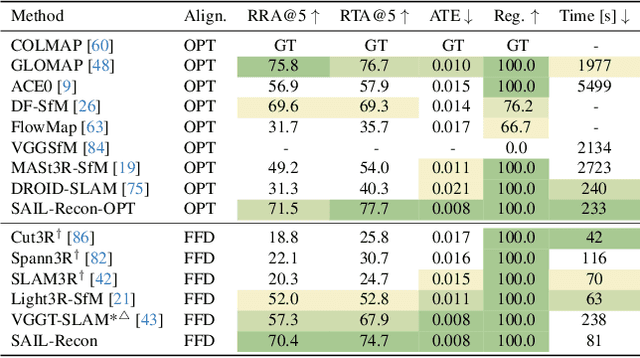
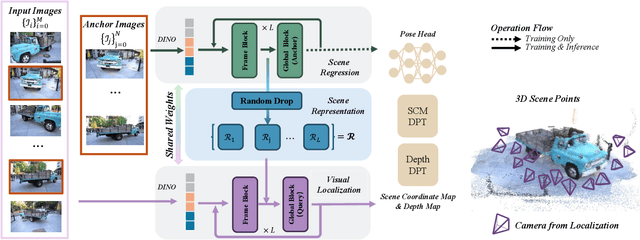
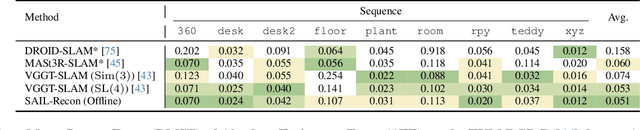
Scene regression methods, such as VGGT, solve the Structure-from-Motion (SfM) problem by directly regressing camera poses and 3D scene structures from input images. They demonstrate impressive performance in handling images under extreme viewpoint changes. However, these methods struggle to handle a large number of input images. To address this problem, we introduce SAIL-Recon, a feed-forward Transformer for large scale SfM, by augmenting the scene regression network with visual localization capabilities. Specifically, our method first computes a neural scene representation from a subset of anchor images. The regression network is then fine-tuned to reconstruct all input images conditioned on this neural scene representation. Comprehensive experiments show that our method not only scales efficiently to large-scale scenes, but also achieves state-of-the-art results on both camera pose estimation and novel view synthesis benchmarks, including TUM-RGBD, CO3Dv2, and Tanks & Temples. We will publish our model and code. Code and models are publicly available at: https://hkust-sail.github.io/ sail-recon/.
Boost 3D Reconstruction using Diffusion-based Monocular Camera Calibration
Nov 26, 2024



In this paper, we present DM-Calib, a diffusion-based approach for estimating pinhole camera intrinsic parameters from a single input image. Monocular camera calibration is essential for many 3D vision tasks. However, most existing methods depend on handcrafted assumptions or are constrained by limited training data, resulting in poor generalization across diverse real-world images. Recent advancements in stable diffusion models, trained on massive data, have shown the ability to generate high-quality images with varied characteristics. Emerging evidence indicates that these models implicitly capture the relationship between camera focal length and image content. Building on this insight, we explore how to leverage the powerful priors of diffusion models for monocular pinhole camera calibration. Specifically, we introduce a new image-based representation, termed Camera Image, which losslessly encodes the numerical camera intrinsics and integrates seamlessly with the diffusion framework. Using this representation, we reformulate the problem of estimating camera intrinsics as the generation of a dense Camera Image conditioned on an input image. By fine-tuning a stable diffusion model to generate a Camera Image from a single RGB input, we can extract camera intrinsics via a RANSAC operation. We further demonstrate that our monocular calibration method enhances performance across various 3D tasks, including zero-shot metric depth estimation, 3D metrology, pose estimation and sparse-view reconstruction. Extensive experiments on multiple public datasets show that our approach significantly outperforms baselines and provides broad benefits to 3D vision tasks. Code is available at https://github.com/JunyuanDeng/DM-Calib.
Focal and Efficient IOU Loss for Accurate Bounding Box Regression
Jan 20, 2021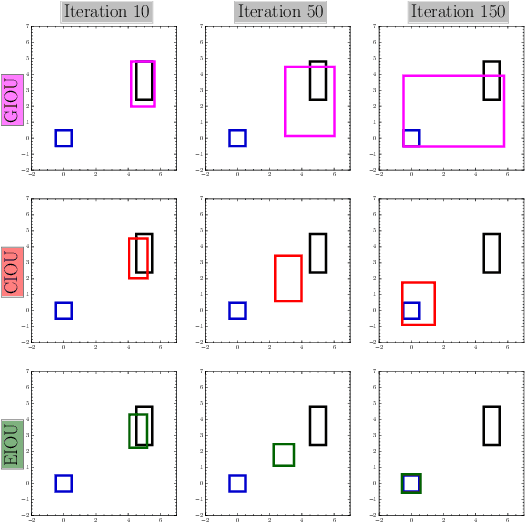
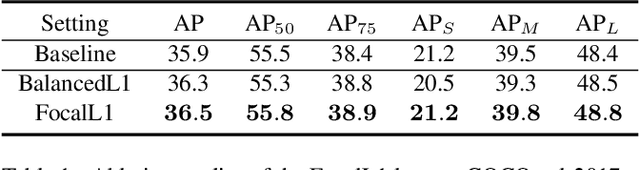
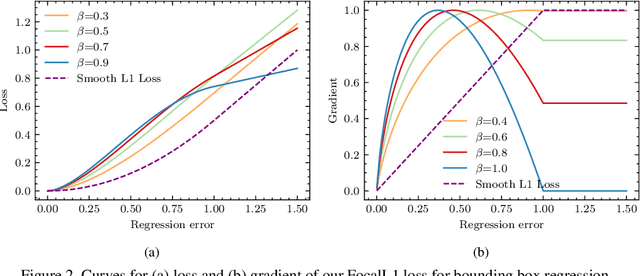
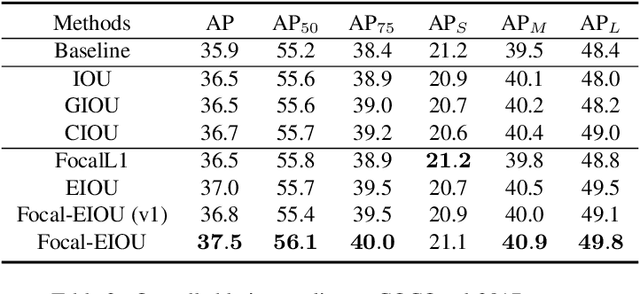
In object detection, bounding box regression (BBR) is a crucial step that determines the object localization performance. However, we find that most previous loss functions for BBR have two main drawbacks: (i) Both $\ell_n$-norm and IOU-based loss functions are inefficient to depict the objective of BBR, which leads to slow convergence and inaccurate regression results. (ii) Most of the loss functions ignore the imbalance problem in BBR that the large number of anchor boxes which have small overlaps with the target boxes contribute most to the optimization of BBR. To mitigate the adverse effects caused thereby, we perform thorough studies to exploit the potential of BBR losses in this paper. Firstly, an Efficient Intersection over Union (EIOU) loss is proposed, which explicitly measures the discrepancies of three geometric factors in BBR, i.e., the overlap area, the central point and the side length. After that, we state the Effective Example Mining (EEM) problem and propose a regression version of focal loss to make the regression process focus on high-quality anchor boxes. Finally, the above two parts are combined to obtain a new loss function, namely Focal-EIOU loss. Extensive experiments on both synthetic and real datasets are performed. Notable superiorities on both the convergence speed and the localization accuracy can be achieved over other BBR losses.
High-level Semantic Feature Detection: A New Perspective for Pedestrian Detection
Apr 23, 2019
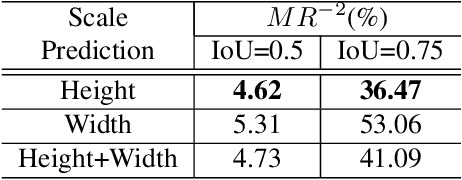
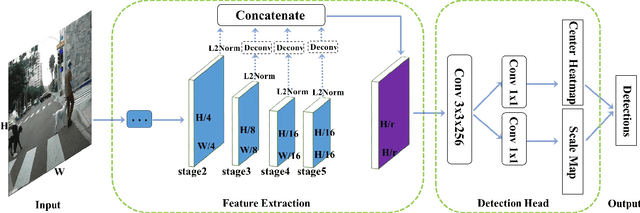
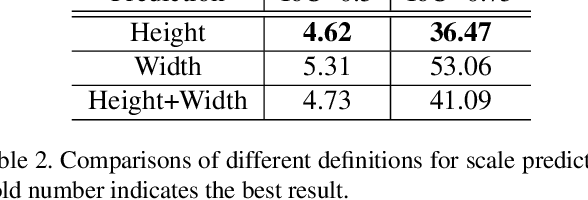
Object detection generally requires sliding-window classifiers in tradition or anchor-based predictions in modern deep learning approaches. However, either of these approaches requires tedious configurations in windows or anchors. In this paper, taking pedestrian detection as an example, we provide a new perspective where detecting objects is motivated as a high-level semantic feature detection task. Like edges, corners, blobs and other feature detectors, the proposed detector scans for feature points all over the image, for which the convolution is naturally suited. However, unlike these traditional low-level features, the proposed detector goes for a higher-level abstraction, that is, we are looking for central points where there are pedestrians, and modern deep models are already capable of such a high-level semantic abstraction. Besides, like blob detection, we also predict the scales of the pedestrian points, which is also a straightforward convolution. Therefore, in this paper, pedestrian detection is simplified as a straightforward center and scale prediction task through convolutions. This way, the proposed method enjoys an anchor-free setting. Though structurally simple, it presents competitive accuracy and good speed on challenging pedestrian detection benchmarks, and hence leading to a new attractive pedestrian detector. Code and models will be available at \url{https://github.com/liuwei16/CSP}.
LaneNet: Real-Time Lane Detection Networks for Autonomous Driving
Jul 04, 2018
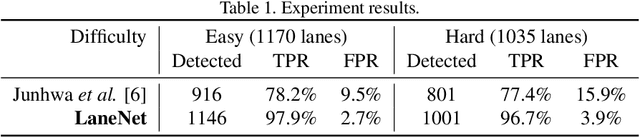


Lane detection is to detect lanes on the road and provide the accurate location and shape of each lane. It severs as one of the key techniques to enable modern assisted and autonomous driving systems. However, several unique properties of lanes challenge the detection methods. The lack of distinctive features makes lane detection algorithms tend to be confused by other objects with similar local appearance. Moreover, the inconsistent number of lanes on a road as well as diverse lane line patterns, e.g. solid, broken, single, double, merging, and splitting lines further hamper the performance. In this paper, we propose a deep neural network based method, named LaneNet, to break down the lane detection into two stages: lane edge proposal and lane line localization. Stage one uses a lane edge proposal network for pixel-wise lane edge classification, and the lane line localization network in stage two then detects lane lines based on lane edge proposals. Please note that the goal of our LaneNet is built to detect lane line only, which introduces more difficulties on suppressing the false detections on the similar lane marks on the road like arrows and characters. Despite all the difficulties, our lane detection is shown to be robust to both highway and urban road scenarios method without relying on any assumptions on the lane number or the lane line patterns. The high running speed and low computational cost endow our LaneNet the capability of being deployed on vehicle-based systems. Experiments validate that our LaneNet consistently delivers outstanding performances on real world traffic scenarios.