 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLaneNet: Real-Time Lane Detection Networks for Autonomous Driving
Paper and Code

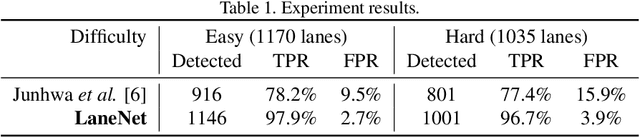


Lane detection is to detect lanes on the road and provide the accurate location and shape of each lane. It severs as one of the key techniques to enable modern assisted and autonomous driving systems. However, several unique properties of lanes challenge the detection methods. The lack of distinctive features makes lane detection algorithms tend to be confused by other objects with similar local appearance. Moreover, the inconsistent number of lanes on a road as well as diverse lane line patterns, e.g. solid, broken, single, double, merging, and splitting lines further hamper the performance. In this paper, we propose a deep neural network based method, named LaneNet, to break down the lane detection into two stages: lane edge proposal and lane line localization. Stage one uses a lane edge proposal network for pixel-wise lane edge classification, and the lane line localization network in stage two then detects lane lines based on lane edge proposals. Please note that the goal of our LaneNet is built to detect lane line only, which introduces more difficulties on suppressing the false detections on the similar lane marks on the road like arrows and characters. Despite all the difficulties, our lane detection is shown to be robust to both highway and urban road scenarios method without relying on any assumptions on the lane number or the lane line patterns. The high running speed and low computational cost endow our LaneNet the capability of being deployed on vehicle-based systems. Experiments validate that our LaneNet consistently delivers outstanding performances on real world traffic scenarios.