 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeXGrid-Mapping: Explicit Implicit Hybrid Grid Submaps for Efficient Incremental Neural LiDAR Mapping
Dec 24, 2025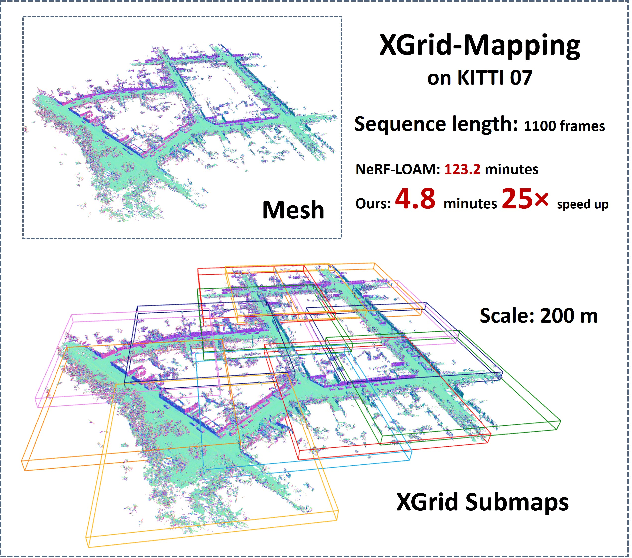
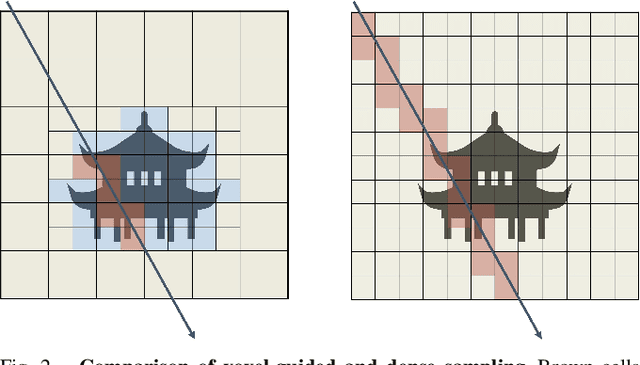
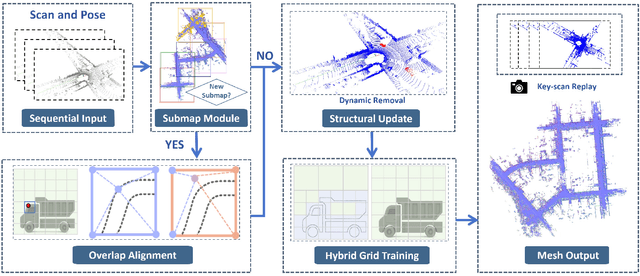
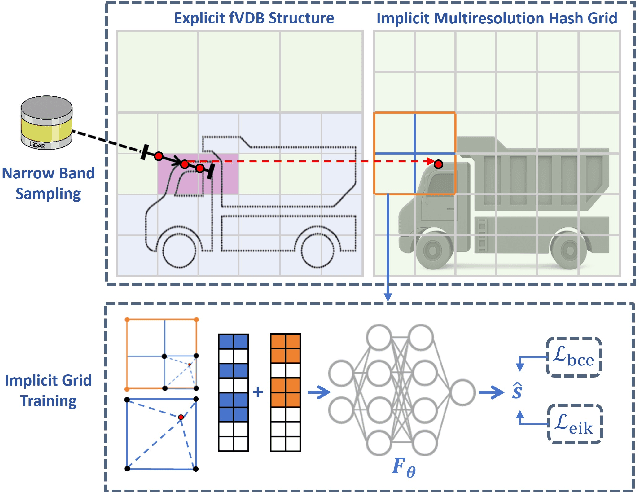
Large-scale incremental mapping is fundamental to the development of robust and reliable autonomous systems, as it underpins incremental environmental understanding with sequential inputs for navigation and decision-making. LiDAR is widely used for this purpose due to its accuracy and robustness. Recently, neural LiDAR mapping has shown impressive performance; however, most approaches rely on dense implicit representations and underutilize geometric structure, while existing voxel-guided methods struggle to achieve real-time performance. To address these challenges, we propose XGrid-Mapping, a hybrid grid framework that jointly exploits explicit and implicit representations for efficient neural LiDAR mapping. Specifically, the strategy combines a sparse grid, providing geometric priors and structural guidance, with an implicit dense grid that enriches scene representation. By coupling the VDB structure with a submap-based organization, the framework reduces computational load and enables efficient incremental mapping on a large scale. To mitigate discontinuities across submaps, we introduce a distillation-based overlap alignment strategy, in which preceding submaps supervise subsequent ones to ensure consistency in overlapping regions. To further enhance robustness and sampling efficiency, we incorporate a dynamic removal module. Extensive experiments show that our approach delivers superior mapping quality while overcoming the efficiency limitations of voxel-guided methods, thereby outperforming existing state-of-the-art mapping methods.
360Recon: An Accurate Reconstruction Method Based on Depth Fusion from 360 Images
Nov 28, 2024



360-degree images offer a significantly wider field of view compared to traditional pinhole cameras, enabling sparse sampling and dense 3D reconstruction in low-texture environments. This makes them crucial for applications in VR, AR, and related fields. However, the inherent distortion caused by the wide field of view affects feature extraction and matching, leading to geometric consistency issues in subsequent multi-view reconstruction. In this work, we propose 360Recon, an innovative MVS algorithm for ERP images. The proposed spherical feature extraction module effectively mitigates distortion effects, and by combining the constructed 3D cost volume with multi-scale enhanced features from ERP images, our approach achieves high-precision scene reconstruction while preserving local geometric consistency. Experimental results demonstrate that 360Recon achieves state-of-the-art performance and high efficiency in depth estimation and 3D reconstruction on existing public panoramic reconstruction datasets.