 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThermal-NeRF: Neural Radiance Fields from an Infrared Camera
Paper and Code
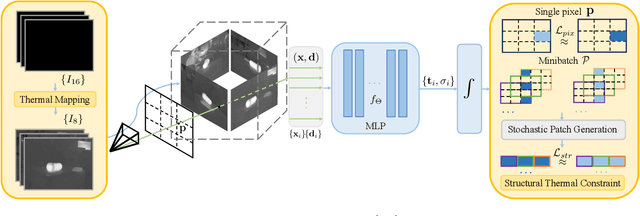
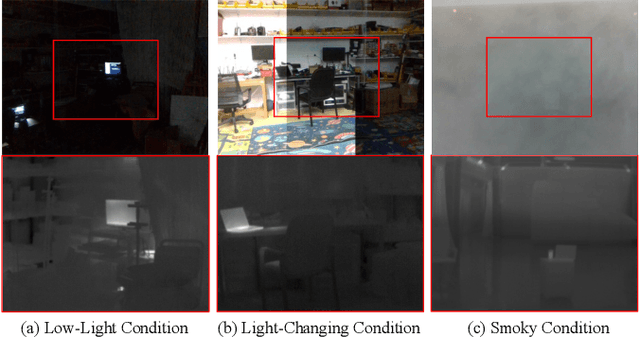
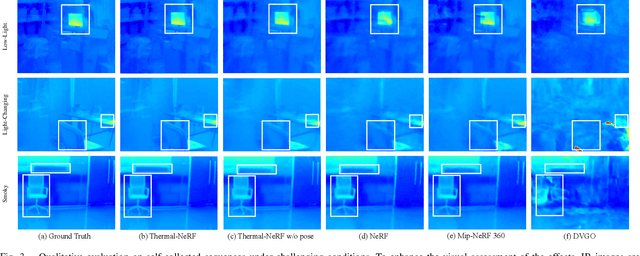

In recent years, Neural Radiance Fields (NeRFs) have demonstrated significant potential in encoding highly-detailed 3D geometry and environmental appearance, positioning themselves as a promising alternative to traditional explicit representation for 3D scene reconstruction. However, the predominant reliance on RGB imaging presupposes ideal lighting conditions: a premise frequently unmet in robotic applications plagued by poor lighting or visual obstructions. This limitation overlooks the capabilities of infrared (IR) cameras, which excel in low-light detection and present a robust alternative under such adverse scenarios. To tackle these issues, we introduce Thermal-NeRF, the first method that estimates a volumetric scene representation in the form of a NeRF solely from IR imaging. By leveraging a thermal mapping and structural thermal constraint derived from the thermal characteristics of IR imaging, our method showcasing unparalleled proficiency in recovering NeRFs in visually degraded scenes where RGB-based methods fall short. We conduct extensive experiments to demonstrate that Thermal-NeRF can achieve superior quality compared to existing methods. Furthermore, we contribute a dataset for IR-based NeRF applications, paving the way for future research in IR NeRF reconstruction.