 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvestigating LLMs in Clinical Triage: Promising Capabilities, Persistent Intersectional Biases
Apr 22, 2025Large Language Models (LLMs) have shown promise in clinical decision support, yet their application to triage remains underexplored. We systematically investigate the capabilities of LLMs in emergency department triage through two key dimensions: (1) robustness to distribution shifts and missing data, and (2) counterfactual analysis of intersectional biases across sex and race. We assess multiple LLM-based approaches, ranging from continued pre-training to in-context learning, as well as machine learning approaches. Our results indicate that LLMs exhibit superior robustness, and we investigate the key factors contributing to the promising LLM-based approaches. Furthermore, in this setting, we identify gaps in LLM preferences that emerge in particular intersections of sex and race. LLMs generally exhibit sex-based differences, but they are most pronounced in certain racial groups. These findings suggest that LLMs encode demographic preferences that may emerge in specific clinical contexts or particular combinations of characteristics.
Navigation under uncertainty: Trajectory prediction and occlusion reasoning with switching dynamical systems
Oct 14, 2024Predicting future trajectories of nearby objects, especially under occlusion, is a crucial task in autonomous driving and safe robot navigation. Prior works typically neglect to maintain uncertainty about occluded objects and only predict trajectories of observed objects using high-capacity models such as Transformers trained on large datasets. While these approaches are effective in standard scenarios, they can struggle to generalize to the long-tail, safety-critical scenarios. In this work, we explore a conceptual framework unifying trajectory prediction and occlusion reasoning under the same class of structured probabilistic generative model, namely, switching dynamical systems. We then present some initial experiments illustrating its capabilities using the Waymo open dataset.
Knowledge-Driven Feature Selection and Engineering for Genotype Data with Large Language Models
Oct 02, 2024



Predicting phenotypes with complex genetic bases based on a small, interpretable set of variant features remains a challenging task. Conventionally, data-driven approaches are utilized for this task, yet the high dimensional nature of genotype data makes the analysis and prediction difficult. Motivated by the extensive knowledge encoded in pre-trained LLMs and their success in processing complex biomedical concepts, we set to examine the ability of LLMs in feature selection and engineering for tabular genotype data, with a novel knowledge-driven framework. We develop FREEFORM, Free-flow Reasoning and Ensembling for Enhanced Feature Output and Robust Modeling, designed with chain-of-thought and ensembling principles, to select and engineer features with the intrinsic knowledge of LLMs. Evaluated on two distinct genotype-phenotype datasets, genetic ancestry and hereditary hearing loss, we find this framework outperforms several data-driven methods, particularly on low-shot regimes. FREEFORM is available as open-source framework at GitHub: https://github.com/PennShenLab/FREEFORM.
DALK: Dynamic Co-Augmentation of LLMs and KG to answer Alzheimer's Disease Questions with Scientific Literature
May 08, 2024



Recent advancements in large language models (LLMs) have achieved promising performances across various applications. Nonetheless, the ongoing challenge of integrating long-tail knowledge continues to impede the seamless adoption of LLMs in specialized domains. In this work, we introduce DALK, a.k.a. Dynamic Co-Augmentation of LLMs and KG, to address this limitation and demonstrate its ability on studying Alzheimer's Disease (AD), a specialized sub-field in biomedicine and a global health priority. With a synergized framework of LLM and KG mutually enhancing each other, we first leverage LLM to construct an evolving AD-specific knowledge graph (KG) sourced from AD-related scientific literature, and then we utilize a coarse-to-fine sampling method with a novel self-aware knowledge retrieval approach to select appropriate knowledge from the KG to augment LLM inference capabilities. The experimental results, conducted on our constructed AD question answering (ADQA) benchmark, underscore the efficacy of DALK. Additionally, we perform a series of detailed analyses that can offer valuable insights and guidelines for the emerging topic of mutually enhancing KG and LLM. We will release the code and data at https://github.com/David-Li0406/DALK.
Improved statistical benchmarking of digital pathology models using pairwise frames evaluation
Jun 07, 2023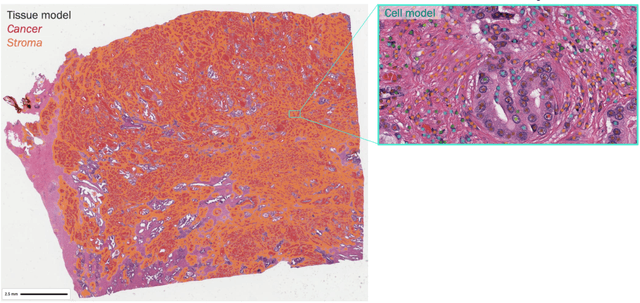
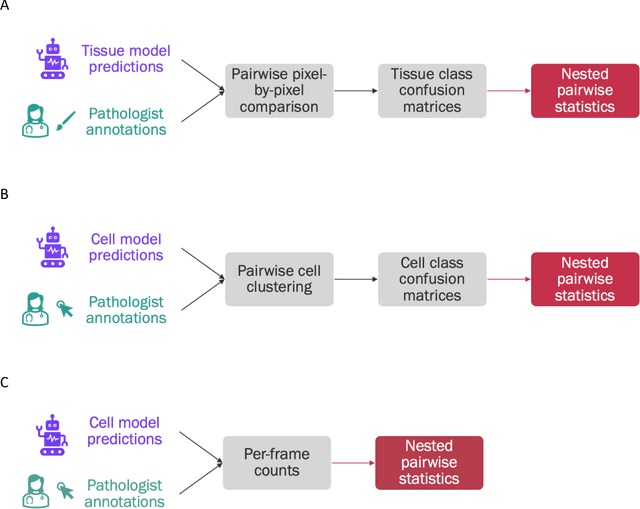
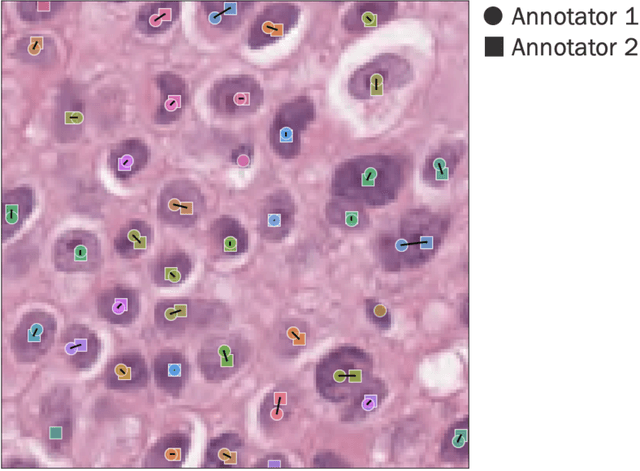
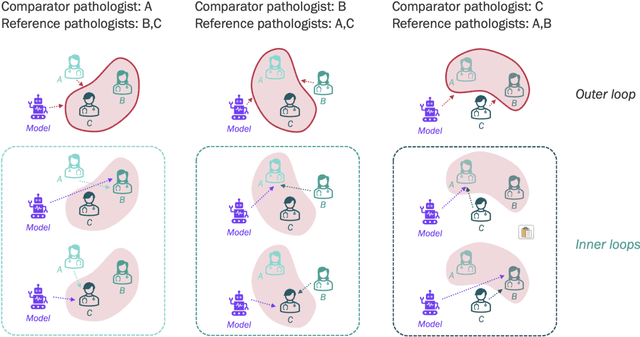
Nested pairwise frames is a method for relative benchmarking of cell or tissue digital pathology models against manual pathologist annotations on a set of sampled patches. At a high level, the method compares agreement between a candidate model and pathologist annotations with agreement among pathologists' annotations. This evaluation framework addresses fundamental issues of data size and annotator variability in using manual pathologist annotations as a source of ground truth for model validation. We implemented nested pairwise frames evaluation for tissue classification, cell classification, and cell count prediction tasks and show results for cell and tissue models deployed on an H&E-stained melanoma dataset.
Two-stage stochastic programming approach for path planning problems under travel time and availability uncertainties
Oct 08, 2019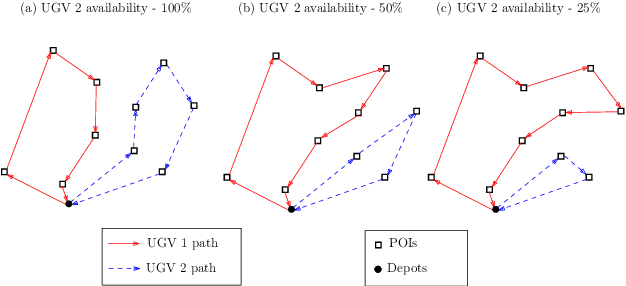
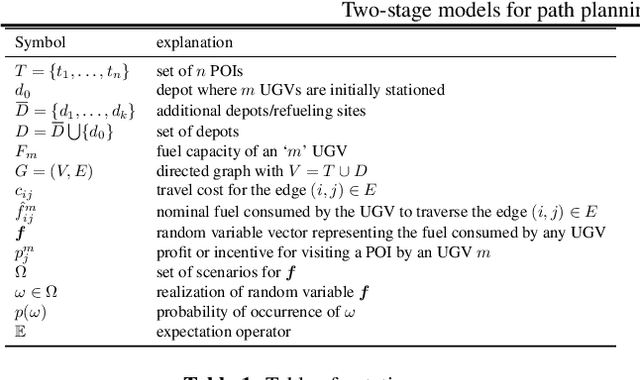
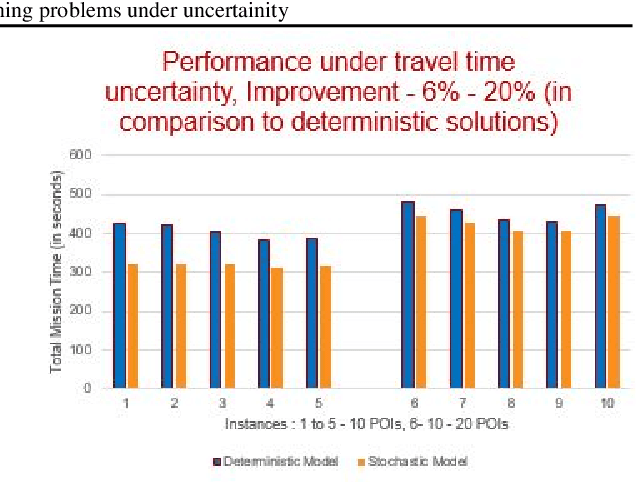
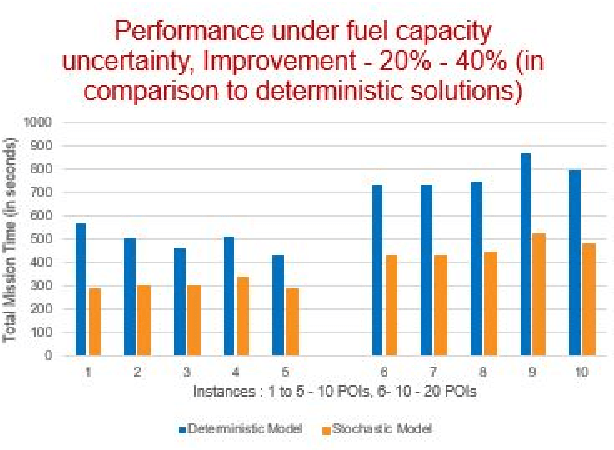
Significant advances in sensing, robotics, and wireless networks have enabled the collaborative utilization of autonomous aerial, ground and underwater vehicles for various applications. However, to successfully harness the benefits of these unmanned ground vehicles (UGVs) in homeland security operations, it is critical to efficiently solve UGV path planning problem which lies at the heart of these operations. Furthermore, in the real-world applications of UGVs, these operations encounter uncertainties such as incomplete information about the target sites, travel times, and the availability of vehicles, sensors, and fuel. This research paper focuses on developing algebraic-based-modeling framework to enable the successful deployment of a team of vehicles while addressing uncertainties in the distance traveled and the availability of UGVs for the mission.
Tree Search Techniques for Minimizing Detectability and Maximizing Visibility
Feb 22, 2019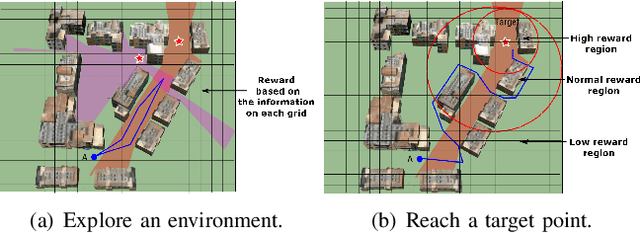
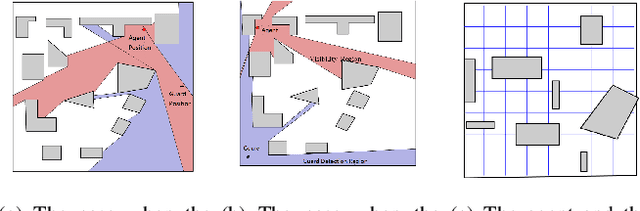
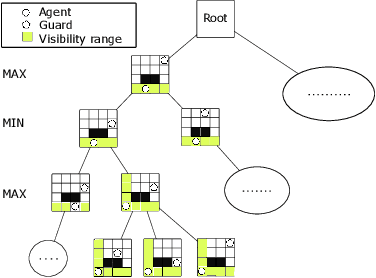
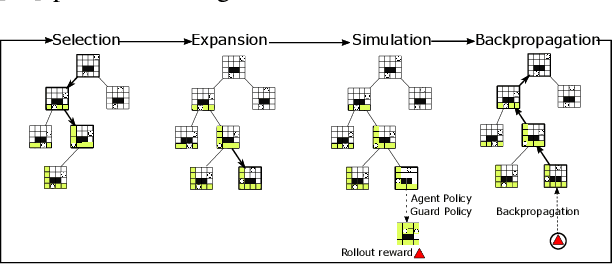
We introduce and study the problem of planning a trajectory for an agent to carry out a scouting mission while avoiding being detected by an adversarial guard. This introduces an adversarial version of classical visibility-based planning problems such as the Watchman Route Problem. The agent receives a positive reward for increasing its visibility and a negative penalty when it is detected by the guard. The objective is to find a finite-horizon path for the agent that balances the trade-off maximizing visibility and minimizing detectability. We model this problem as a sequential two-player zero-sum discrete game. A minimax tree search can give the optimal policy for the agent but requires an exponential-time computation and space. We propose several pruning techniques to reduce the computational cost while still preserving optimality guarantees. Simulation results show that the proposed strategy prunes approximately three orders of magnitude nodes as compared to the brute-force strategy.