 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNavigation under uncertainty: Trajectory prediction and occlusion reasoning with switching dynamical systems
Oct 14, 2024Predicting future trajectories of nearby objects, especially under occlusion, is a crucial task in autonomous driving and safe robot navigation. Prior works typically neglect to maintain uncertainty about occluded objects and only predict trajectories of observed objects using high-capacity models such as Transformers trained on large datasets. While these approaches are effective in standard scenarios, they can struggle to generalize to the long-tail, safety-critical scenarios. In this work, we explore a conceptual framework unifying trajectory prediction and occlusion reasoning under the same class of structured probabilistic generative model, namely, switching dynamical systems. We then present some initial experiments illustrating its capabilities using the Waymo open dataset.
Active Inference in Contextual Multi-Armed Bandits for Autonomous Robotic Exploration
Aug 07, 2024



Autonomous selection of optimal options for data collection from multiple alternatives is challenging in uncertain environments. When secondary information about options is accessible, such problems can be framed as contextual multi-armed bandits (CMABs). Neuro-inspired active inference has gained interest for its ability to balance exploration and exploitation using the expected free energy objective function. Unlike previous studies that showed the effectiveness of active inference based strategy for CMABs using synthetic data, this study aims to apply active inference to realistic scenarios, using a simulated mineralogical survey site selection problem. Hyperspectral data from AVIRIS-NG at Cuprite, Nevada, serves as contextual information for predicting outcome probabilities, while geologists' mineral labels represent outcomes. Monte Carlo simulations assess the robustness of active inference against changing expert preferences. Results show that active inference requires fewer iterations than standard bandit approaches with real-world noisy and biased data, and performs better when outcome preferences vary online by adapting the selection strategy to align with expert shifts.
Online Pareto-Optimal Decision-Making for Complex Tasks using Active Inference
Jun 17, 2024When a robot autonomously performs a complex task, it frequently must balance competing objectives while maintaining safety. This becomes more difficult in uncertain environments with stochastic outcomes. Enhancing transparency in the robot's behavior and aligning with user preferences are also crucial. This paper introduces a novel framework for multi-objective reinforcement learning that ensures safe task execution, optimizes trade-offs between objectives, and adheres to user preferences. The framework has two main layers: a multi-objective task planner and a high-level selector. The planning layer generates a set of optimal trade-off plans that guarantee satisfaction of a temporal logic task. The selector uses active inference to decide which generated plan best complies with user preferences and aids learning. Operating iteratively, the framework updates a parameterized learning model based on collected data. Case studies and benchmarks on both manipulation and mobile robots show that our framework outperforms other methods and (i) learns multiple optimal trade-offs, (ii) adheres to a user preference, and (iii) allows the user to adjust the balance between (i) and (ii).
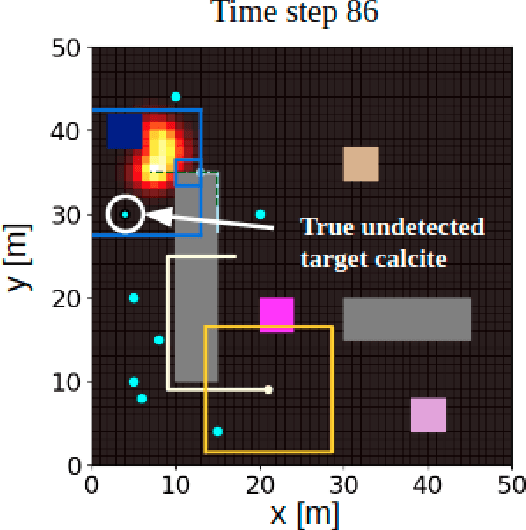
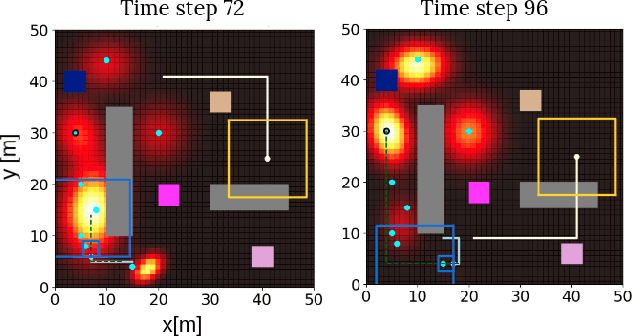
Observation-Augmented Contextual Multi-Armed Bandits for Robotic Exploration with Uncertain Semantic Data
Dec 19, 2023



For robotic decision-making under uncertainty, the balance between exploitation and exploration of available options must be carefully taken into account. In this study, we introduce a new variant of contextual multi-armed bandits called observation-augmented CMABs (OA-CMABs) wherein a decision-making agent can utilize extra outcome observations from an external information source. CMABs model the expected option outcomes as a function of context features and hidden parameters, which are inferred from previous option outcomes. In OA-CMABs, external observations are also a function of context features and thus provide additional evidence about the hidden parameters. Yet, if an external information source is error-prone, the resulting posterior updates can harm decision-making performance unless the presence of errors is considered. To this end, we propose a robust Bayesian inference process for OA-CMABs that is based on the concept of probabilistic data validation. Our approach handles complex mixture model parameter priors and hybrid observation likelihoods for semantic data sources, allowing us to develop validation algorithms based on recently develop probabilistic semantic data association techniques. Furthermore, to more effectively cope with the combined sources of uncertainty in OA-CMABs, we derive a new active inference algorithm for option selection based on expected free energy minimization. This generalizes previous work on active inference for bandit-based robotic decision-making by accounting for faulty observations and non-Gaussian inference. Our approaches are demonstrated on a simulated asynchronous search site selection problem for space exploration. The results show that even if incorrect observations are provided by external information sources, efficient decision-making and robust parameter inference are still achieved in a wide variety of experimental conditions.
Active Inference for Autonomous Decision-Making with Contextual Multi-Armed Bandits
Sep 19, 2022

In autonomous robotic decision-making under uncertainty, the tradeoff between exploitation and exploration of available options must be considered. If secondary information associated with options can be utilized, such decision-making problems can often be formulated as a contextual multi-armed bandits (CMABs). In this study, we apply active inference, which has been actively studied in the field of neuroscience in recent years, as an alternative action selection strategy for CMABs. Unlike conventional action selection strategies, it is possible to rigorously evaluate the uncertainty of each option when calculating the expected free energy (EFE) associated with the decision agent's probabilistic model, as derived from the free-energy principle. We specifically address the case where a categorical observation likelihood function is used, such that EFE values are analytically intractable. We introduce new approximation methods for computing the EFE based on variational and Laplace approximations. Extensive simulation study results demonstrate that, compared to other strategies, active inference generally requires far fewer iterations to identify optimal options and generally achieves superior cumulative regret, for relatively low extra computational cost.
Probabilistic Semantic Data Association for Collaborative Human-Robot Sensing
Oct 18, 2021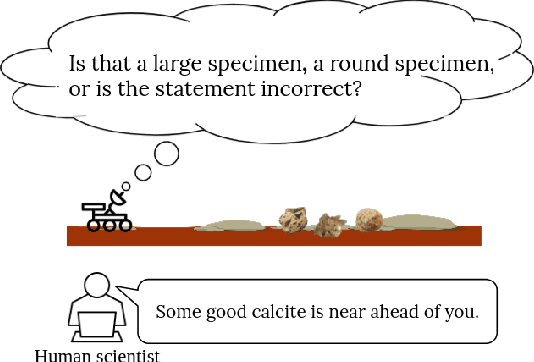

In collaborative human-robot semantic sensing problems, e.g. for scientific exploration, robots could potentially overtrust information given by a human partner, resulting in suboptimal state estimation and poor team performance. When humans cannot be treated as oracles, robots need to update state beliefs to correctly account for possible discrepancies between human semantic observations and the actual world states which lead to those observations. This work develops strategies for rigorous online calculation of probabilistic semantic data association (PSDA) probabilities for semantic likelihoods in general settings, unlike previous work which developed naive or heuristic approximations for specific settings. The new PSDA method is incorporated into a hybrid Bayesian data fusion scheme which uses Gaussian mixture priors for object states and softmax functions for semantic human sensor observation likelihoods, and is demonstrated in Monte Carlo simulations of collaborative multi-object search missions featuring a range of relevant human sensing characteristics (e.g. false detection rate). It is shown that PSDA leads to robust estimation of observation association probabilities under a wide range of conditions whenever semantic human sensor data contain significant target reference ambiguities for autonomous object search and localization.