 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTwo-stage stochastic programming approach for path planning problems under travel time and availability uncertainties
Paper and Code
Oct 08, 2019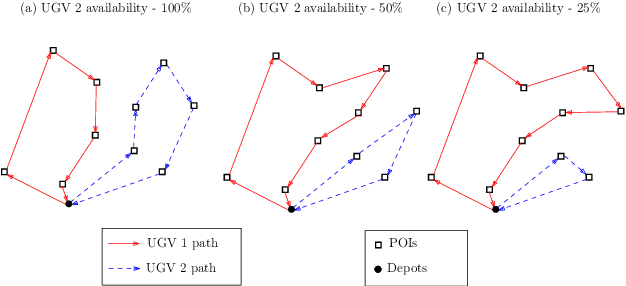
Significant advances in sensing, robotics, and wireless networks have enabled the collaborative utilization of autonomous aerial, ground and underwater vehicles for various applications. However, to successfully harness the benefits of these unmanned ground vehicles (UGVs) in homeland security operations, it is critical to efficiently solve UGV path planning problem which lies at the heart of these operations. Furthermore, in the real-world applications of UGVs, these operations encounter uncertainties such as incomplete information about the target sites, travel times, and the availability of vehicles, sensors, and fuel. This research paper focuses on developing algebraic-based-modeling framework to enable the successful deployment of a team of vehicles while addressing uncertainties in the distance traveled and the availability of UGVs for the mission.