 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient algorithms for autonomous electric vehicles' min-max routing problem
Aug 07, 2020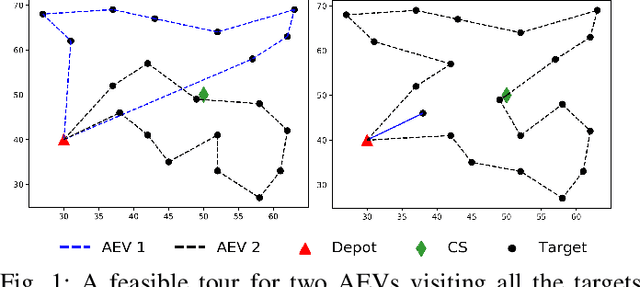
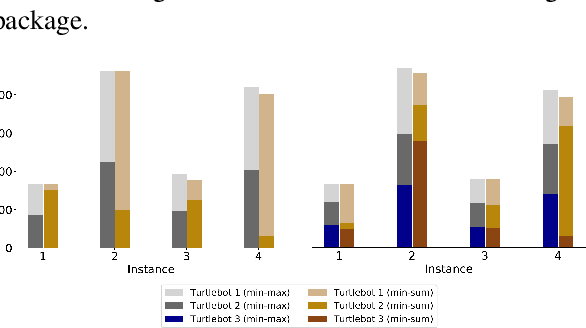
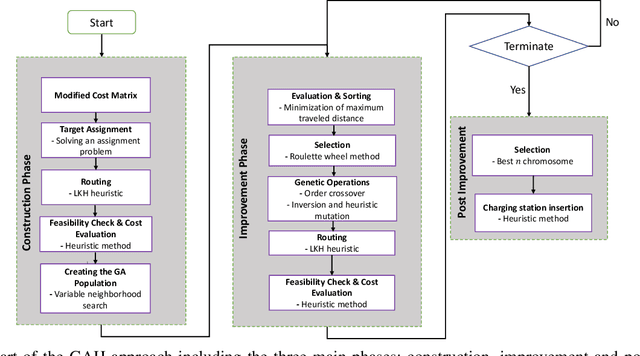
Increase in greenhouse gases emission from the transportation sector has led companies and government to elevate and support the production of electric vehicles. The natural synergy between increased support for electric and emergence of autonomous vehicles possibly can relieve the limitations regarding access to charging infrastructure, time management, and range anxiety. In this work, a fleet of Autonomous Electric Vehicles (AEV) is considered for transportation and logistic capabilities with limited battery capacity and scarce charging station availability are considered while planning to avoid inefficient routing strategies. We introduce a min-max autonomous electric vehicle routing problem (AEVRP) where the maximum distance traveled by any AEV is minimized while considering charging stations for recharging. We propose a genetic algorithm based meta-heuristic that can efficiently solve a variety of instances. Extensive computational results, sensitivity analysis, and data-driven simulation implemented with the robot operating system (ROS) middleware are performed to corroborate the efficiency of the proposed approach, both quantitatively and qualitatively.
Two-stage stochastic programming approach for path planning problems under travel time and availability uncertainties
Oct 08, 2019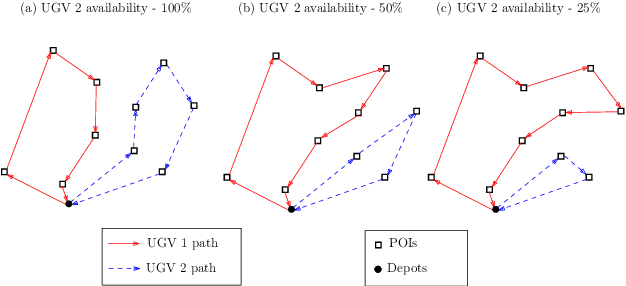
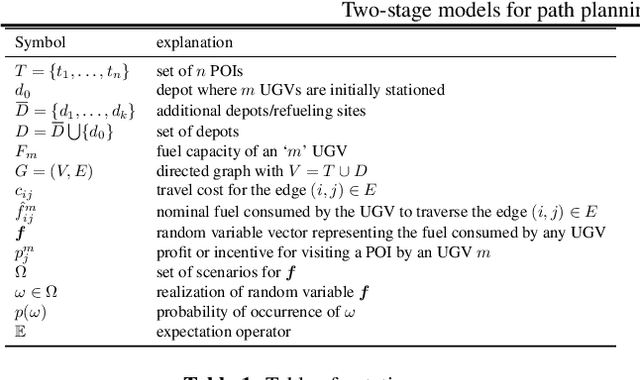
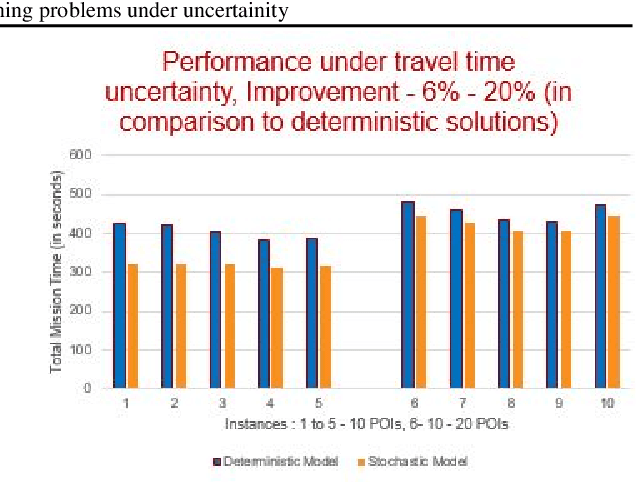
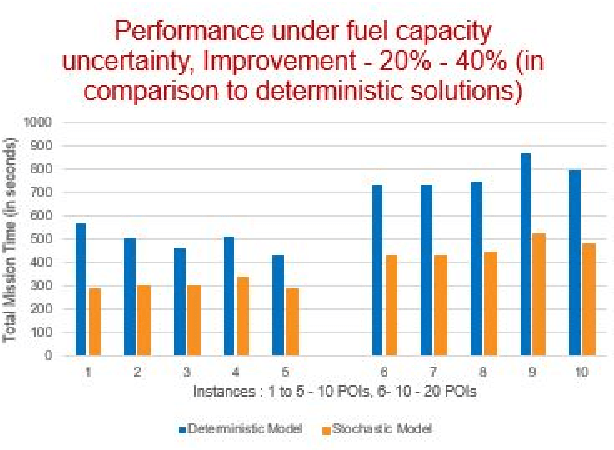
Significant advances in sensing, robotics, and wireless networks have enabled the collaborative utilization of autonomous aerial, ground and underwater vehicles for various applications. However, to successfully harness the benefits of these unmanned ground vehicles (UGVs) in homeland security operations, it is critical to efficiently solve UGV path planning problem which lies at the heart of these operations. Furthermore, in the real-world applications of UGVs, these operations encounter uncertainties such as incomplete information about the target sites, travel times, and the availability of vehicles, sensors, and fuel. This research paper focuses on developing algebraic-based-modeling framework to enable the successful deployment of a team of vehicles while addressing uncertainties in the distance traveled and the availability of UGVs for the mission.
Path Planning for Multiple Heterogeneous Unmanned Vehicles with Uncertain Service Times
Feb 24, 2017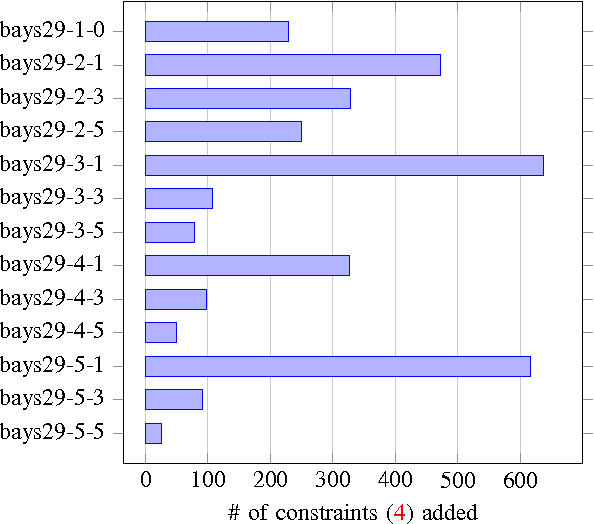
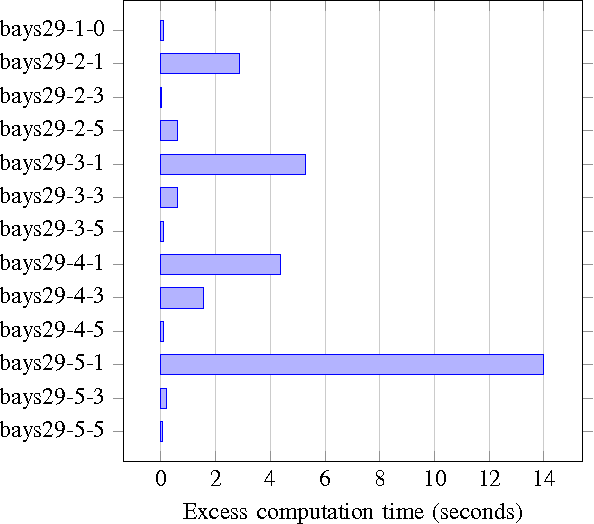
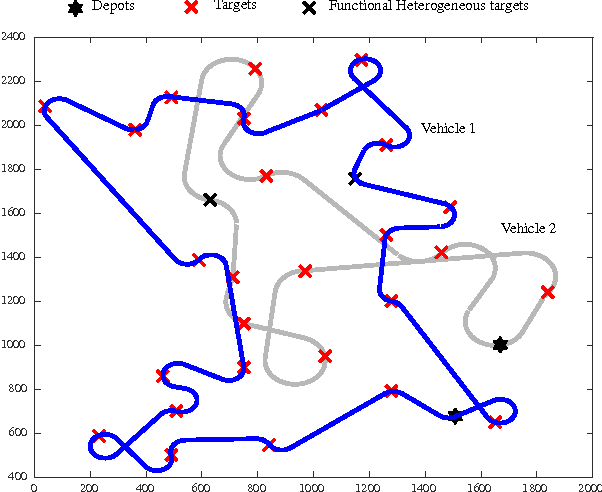
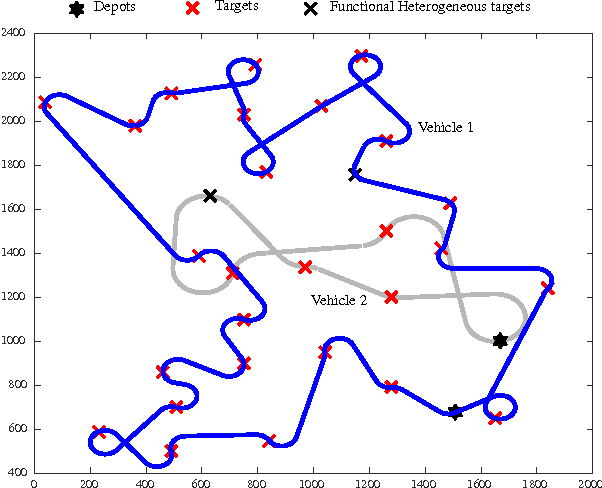
This article presents a framework and develops a formulation to solve a path planning problem for multiple heterogeneous Unmanned Vehicles (UVs) with uncertain service times for each vehicle--target pair. The vehicles incur a penalty proportional to the duration of their total service time in excess of a preset constant. The vehicles differ in their motion constraints and are located at distinct depots at the start of the mission. The vehicles may also be equipped with disparate sensors. The objective is to find a tour for each vehicle that starts and ends at its respective depot such that every target is visited and serviced by some vehicle while minimizing the sum of the total travel distance and the expected penalty incurred by all the vehicles. We formulate the problem as a two-stage stochastic program with recourse, present the theoretical properties of the formulation and advantages of using such a formulation, as opposed to a deterministic expected value formulation, to solve the problem. Extensive numerical simulations also corroborate the effectiveness of the proposed approach.