 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStackelberg Games with $k$-Submodular Function under Distributional Risk-Receptiveness and Robustness
Jun 18, 2024



We study submodular optimization in adversarial context, applicable to machine learning problems such as feature selection using data susceptible to uncertainties and attacks. We focus on Stackelberg games between an attacker (or interdictor) and a defender where the attacker aims to minimize the defender's objective of maximizing a $k$-submodular function. We allow uncertainties arising from the success of attacks and inherent data noise, and address challenges due to incomplete knowledge of the probability distribution of random parameters. Specifically, we introduce Distributionally Risk-Averse $k$-Submodular Interdiction Problem (DRA $k$-SIP) and Distributionally Risk-Receptive $k$-Submodular Interdiction Problem (DRR $k$-SIP) along with finitely convergent exact algorithms for solving them. The DRA $k$-SIP solution allows risk-averse interdictor to develop robust strategies for real-world uncertainties. Conversely, DRR $k$-SIP solution suggests aggressive tactics for attackers, willing to embrace (distributional) risk to inflict maximum damage, identifying critical vulnerable components, which can be used for the defender's defensive strategies. The optimal values derived from both DRA $k$-SIP and DRR $k$-SIP offer a confidence interval-like range for the expected value of the defender's objective function, capturing distributional ambiguity. We conduct computational experiments using instances of feature selection and sensor placement problems, and Wisconsin breast cancer data and synthetic data, respectively.
Logic Constrained Pointer Networks for Interpretable Textual Similarity
Jul 15, 2020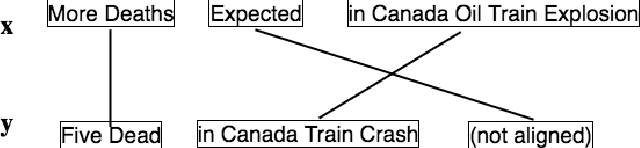
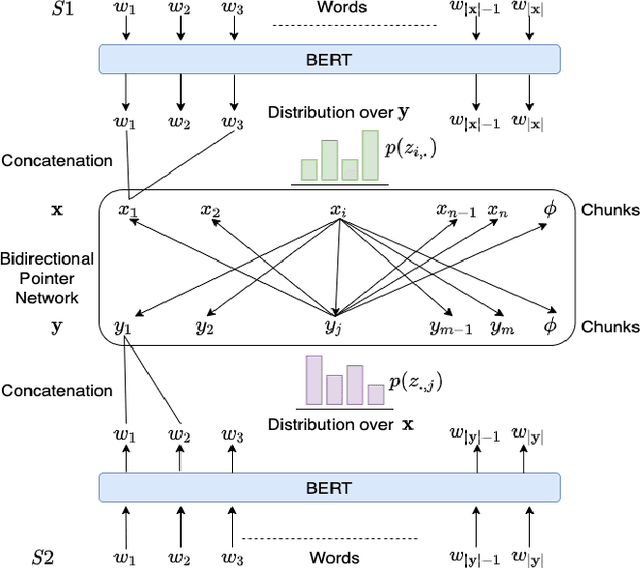
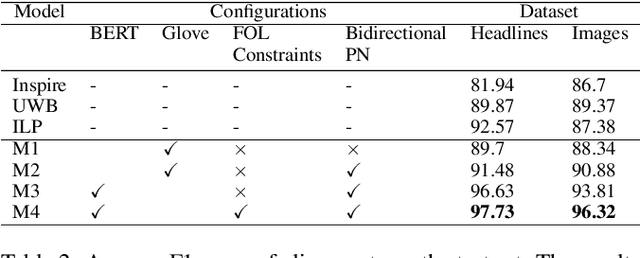
Systematically discovering semantic relationships in text is an important and extensively studied area in Natural Language Processing, with various tasks such as entailment, semantic similarity, etc. Decomposability of sentence-level scores via subsequence alignments has been proposed as a way to make models more interpretable. We study the problem of aligning components of sentences leading to an interpretable model for semantic textual similarity. In this paper, we introduce a novel pointer network based model with a sentinel gating function to align constituent chunks, which are represented using BERT. We improve this base model with a loss function to equally penalize misalignments in both sentences, ensuring the alignments are bidirectional. Finally, to guide the network with structured external knowledge, we introduce first-order logic constraints based on ConceptNet and syntactic knowledge. The model achieves an F1 score of 97.73 and 96.32 on the benchmark SemEval datasets for the chunk alignment task, showing large improvements over the existing solutions. Source code is available at https://github.com/manishb89/interpretable_sentence_similarity
* Accepted at IJCAI 2020 Main Track. Sole copyright holder is IJCAI, all rights reserved. Available at https://www.ijcai.org/Proceedings/2020/333
Two-stage stochastic programming approach for path planning problems under travel time and availability uncertainties
Oct 08, 2019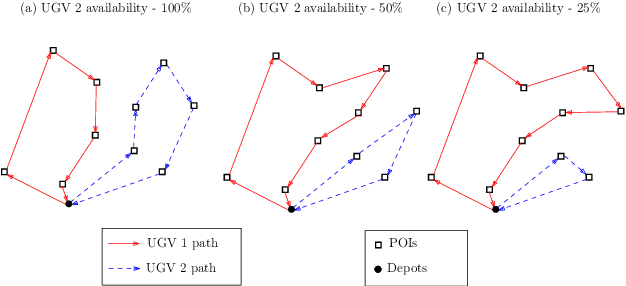
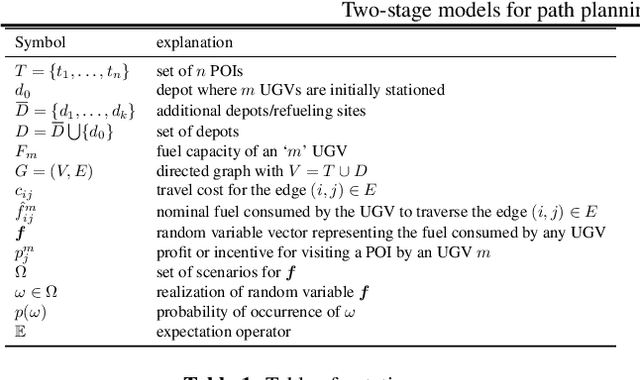
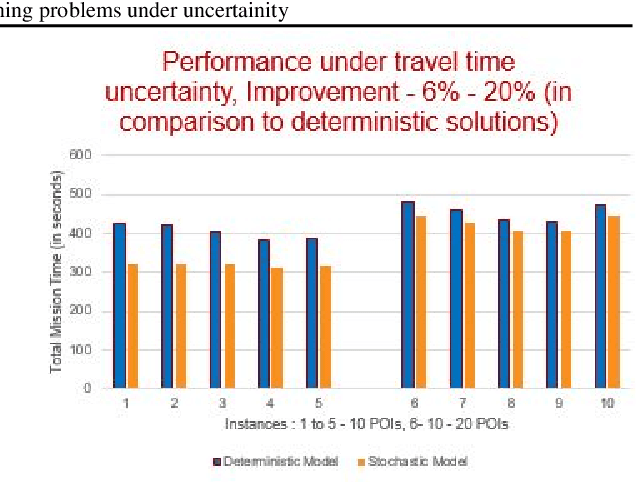
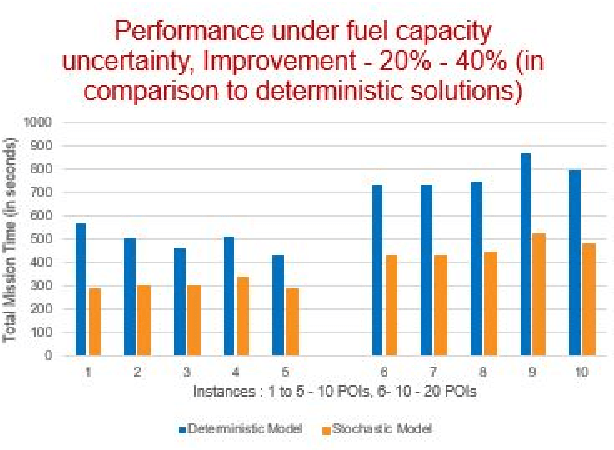
Significant advances in sensing, robotics, and wireless networks have enabled the collaborative utilization of autonomous aerial, ground and underwater vehicles for various applications. However, to successfully harness the benefits of these unmanned ground vehicles (UGVs) in homeland security operations, it is critical to efficiently solve UGV path planning problem which lies at the heart of these operations. Furthermore, in the real-world applications of UGVs, these operations encounter uncertainties such as incomplete information about the target sites, travel times, and the availability of vehicles, sensors, and fuel. This research paper focuses on developing algebraic-based-modeling framework to enable the successful deployment of a team of vehicles while addressing uncertainties in the distance traveled and the availability of UGVs for the mission.