 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Training Superintelligent Software Agents through Self-Play SWE-RL
Dec 21, 2025While current software agents powered by large language models (LLMs) and agentic reinforcement learning (RL) can boost programmer productivity, their training data (e.g., GitHub issues and pull requests) and environments (e.g., pass-to-pass and fail-to-pass tests) heavily depend on human knowledge or curation, posing a fundamental barrier to superintelligence. In this paper, we present Self-play SWE-RL (SSR), a first step toward training paradigms for superintelligent software agents. Our approach takes minimal data assumptions, only requiring access to sandboxed repositories with source code and installed dependencies, with no need for human-labeled issues or tests. Grounded in these real-world codebases, a single LLM agent is trained via reinforcement learning in a self-play setting to iteratively inject and repair software bugs of increasing complexity, with each bug formally specified by a test patch rather than a natural language issue description. On the SWE-bench Verified and SWE-Bench Pro benchmarks, SSR achieves notable self-improvement (+10.4 and +7.8 points, respectively) and consistently outperforms the human-data baseline over the entire training trajectory, despite being evaluated on natural language issues absent from self-play. Our results, albeit early, suggest a path where agents autonomously gather extensive learning experiences from real-world software repositories, ultimately enabling superintelligent systems that exceed human capabilities in understanding how systems are constructed, solving novel challenges, and autonomously creating new software from scratch.
The KoLMogorov Test: Compression by Code Generation
Mar 18, 2025Compression is at the heart of intelligence. A theoretically optimal way to compress any sequence of data is to find the shortest program that outputs that sequence and then halts. However, such 'Kolmogorov compression' is uncomputable, and code generating LLMs struggle to approximate this theoretical ideal, as it requires reasoning, planning and search capabilities beyond those of current models. In this work, we introduce the KoLMogorov-Test (KT), a compression-as-intelligence test for code generating LLMs. In KT a model is presented with a sequence of data at inference time, and asked to generate the shortest program that produces the sequence. We identify several benefits of KT for both evaluation and training: an essentially infinite number of problem instances of varying difficulty is readily available, strong baselines already exist, the evaluation metric (compression) cannot be gamed, and pretraining data contamination is highly unlikely. To evaluate current models, we use audio, text, and DNA data, as well as sequences produced by random synthetic programs. Current flagship models perform poorly - both GPT4-o and Llama-3.1-405B struggle on our natural and synthetic sequences. On our synthetic distribution, we are able to train code generation models with lower compression rates than previous approaches. Moreover, we show that gains on synthetic data generalize poorly to real data, suggesting that new innovations are necessary for additional gains on KT.
What Makes Large Language Models Reason in (Multi-Turn) Code Generation?
Oct 10, 2024



Prompting techniques such as chain-of-thought have established themselves as a popular vehicle for improving the outputs of large language models (LLMs). For code generation, however, their exact mechanics and efficacy are under-explored. We thus investigate the effects of a wide range of prompting strategies with a focus on automatic re-prompting over multiple turns and computational requirements. After systematically decomposing reasoning, instruction, and execution feedback prompts, we conduct an extensive grid search on the competitive programming benchmarks CodeContests and TACO for multiple LLM families and sizes (Llama 3.0 and 3.1, 8B, 70B, 405B, and GPT-4o). Our study reveals strategies that consistently improve performance across all models with small and large sampling budgets. We then show how finetuning with such an optimal configuration allows models to internalize the induced reasoning process and obtain improvements in performance and scalability for multi-turn code generation.
RLEF: Grounding Code LLMs in Execution Feedback with Reinforcement Learning
Oct 02, 2024


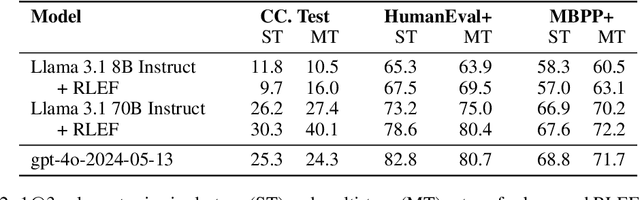
Large language models (LLMs) deployed as agents solve user-specified tasks over multiple steps while keeping the required manual engagement to a minimum. Crucially, such LLMs need to ground their generations in any feedback obtained to reliably achieve desired outcomes. We propose an end-to-end reinforcement learning method for teaching models to leverage execution feedback in the realm of code synthesis, where state-of-the-art LLMs struggle to improve code iteratively compared to independent sampling. We benchmark on competitive programming tasks, where we achieve new start-of-the art results with both small (8B parameters) and large (70B) models while reducing the amount of samples required by an order of magnitude. Our analysis of inference-time behavior demonstrates that our method produces LLMs that effectively leverage automatic feedback over multiple steps.
Meta Large Language Model Compiler: Foundation Models of Compiler Optimization
Jun 27, 2024



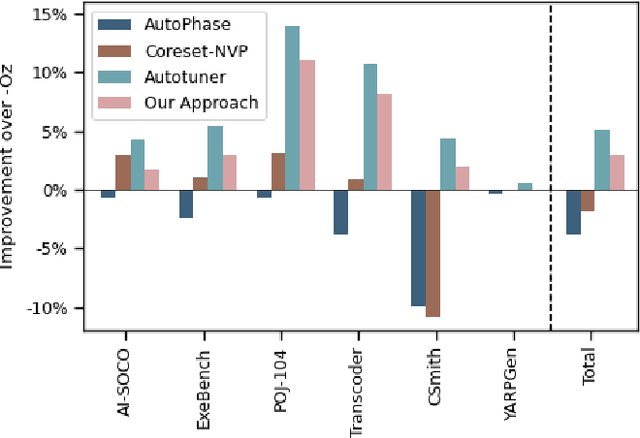
Large Language Models (LLMs) have demonstrated remarkable capabilities across a variety of software engineering and coding tasks. However, their application in the domain of code and compiler optimization remains underexplored. Training LLMs is resource-intensive, requiring substantial GPU hours and extensive data collection, which can be prohibitive. To address this gap, we introduce Meta Large Language Model Compiler (LLM Compiler), a suite of robust, openly available, pre-trained models specifically designed for code optimization tasks. Built on the foundation of Code Llama, LLM Compiler enhances the understanding of compiler intermediate representations (IRs), assembly language, and optimization techniques. The model has been trained on a vast corpus of 546 billion tokens of LLVM-IR and assembly code and has undergone instruction fine-tuning to interpret compiler behavior. LLM Compiler is released under a bespoke commercial license to allow wide reuse and is available in two sizes: 7 billion and 13 billion parameters. We also present fine-tuned versions of the model, demonstrating its enhanced capabilities in optimizing code size and disassembling from x86_64 and ARM assembly back into LLVM-IR. These achieve 77% of the optimising potential of an autotuning search, and 45% disassembly round trip (14% exact match). This release aims to provide a scalable, cost-effective foundation for further research and development in compiler optimization by both academic researchers and industry practitioners.
The Larger the Better? Improved LLM Code-Generation via Budget Reallocation
Mar 31, 2024



It is a common belief that large language models (LLMs) are better than smaller-sized ones. However, larger models also require significantly more time and compute during inference. This begs the question: what happens when both models operate under the same budget? (e.g., compute, run-time). To address this question, we analyze code generation LLMs of various sizes and make comparisons such as running a 70B model once vs. generating five outputs from a 13B model and selecting one. Our findings reveal that, in a standard unit-test setup, the repeated use of smaller models can yield consistent improvements, with gains of up to 15% across five tasks. On the other hand, in scenarios where unit-tests are unavailable, a ranking-based selection of candidates from the smaller model falls short of the performance of a single output from larger ones. Our results highlight the potential of using smaller models instead of larger ones, and the importance of studying approaches for ranking LLM outputs.
Large Language Models for Compiler Optimization
Sep 11, 2023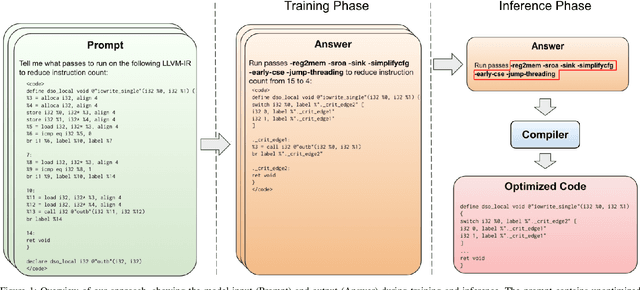
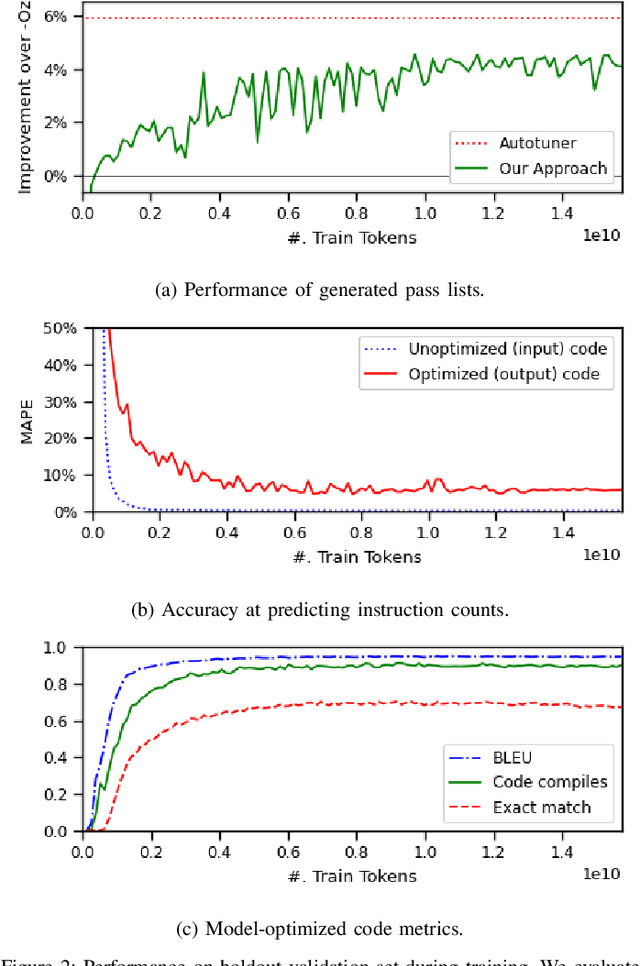
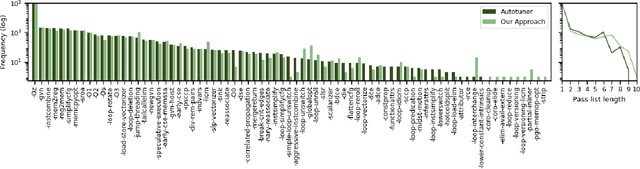
We explore the novel application of Large Language Models to code optimization. We present a 7B-parameter transformer model trained from scratch to optimize LLVM assembly for code size. The model takes as input unoptimized assembly and outputs a list of compiler options to best optimize the program. Crucially, during training, we ask the model to predict the instruction counts before and after optimization, and the optimized code itself. These auxiliary learning tasks significantly improve the optimization performance of the model and improve the model's depth of understanding. We evaluate on a large suite of test programs. Our approach achieves a 3.0% improvement in reducing instruction counts over the compiler, outperforming two state-of-the-art baselines that require thousands of compilations. Furthermore, the model shows surprisingly strong code reasoning abilities, generating compilable code 91% of the time and perfectly emulating the output of the compiler 70% of the time.
Code Llama: Open Foundation Models for Code
Aug 25, 2023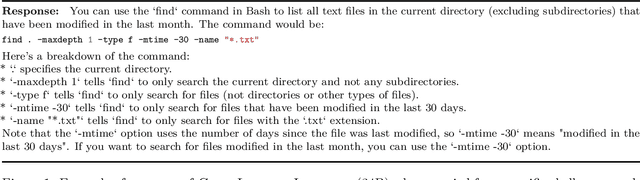
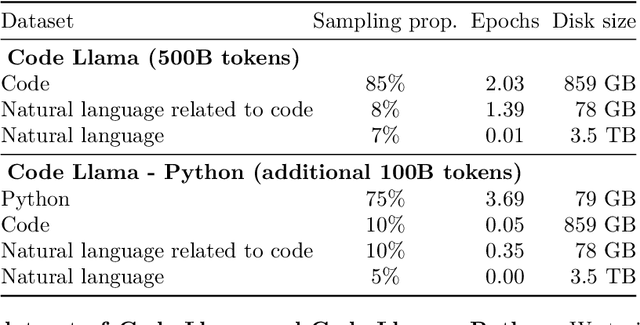
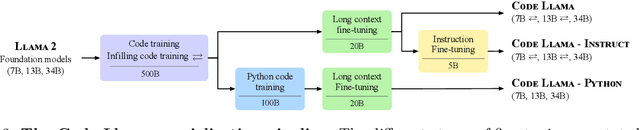
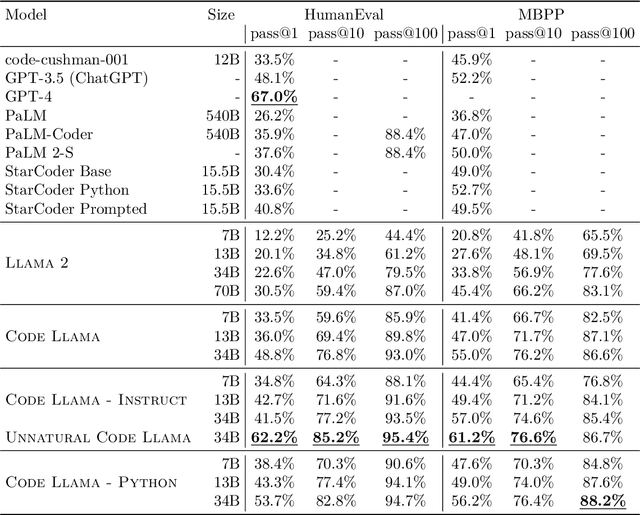
We release Code Llama, a family of large language models for code based on Llama 2 providing state-of-the-art performance among open models, infilling capabilities, support for large input contexts, and zero-shot instruction following ability for programming tasks. We provide multiple flavors to cover a wide range of applications: foundation models (Code Llama), Python specializations (Code Llama - Python), and instruction-following models (Code Llama - Instruct) with 7B, 13B and 34B parameters each. All models are trained on sequences of 16k tokens and show improvements on inputs with up to 100k tokens. 7B and 13B Code Llama and Code Llama - Instruct variants support infilling based on surrounding content. Code Llama reaches state-of-the-art performance among open models on several code benchmarks, with scores of up to 53% and 55% on HumanEval and MBPP, respectively. Notably, Code Llama - Python 7B outperforms Llama 2 70B on HumanEval and MBPP, and all our models outperform every other publicly available model on MultiPL-E. We release Code Llama under a permissive license that allows for both research and commercial use.
Leveraging Demonstrations with Latent Space Priors
Oct 26, 2022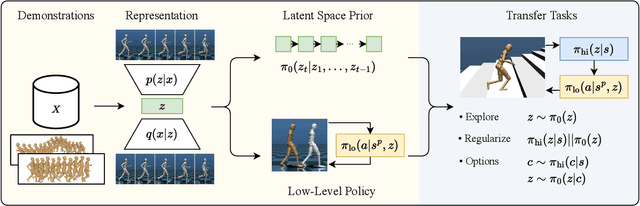
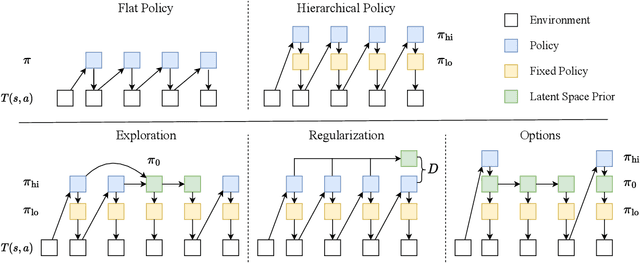
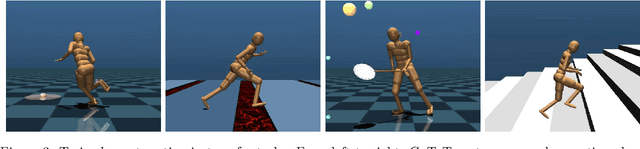
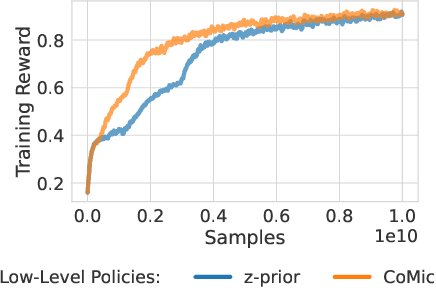
Demonstrations provide insight into relevant state or action space regions, bearing great potential to boost the efficiency and practicality of reinforcement learning agents. In this work, we propose to leverage demonstration datasets by combining skill learning and sequence modeling. Starting with a learned joint latent space, we separately train a generative model of demonstration sequences and an accompanying low-level policy. The sequence model forms a latent space prior over plausible demonstration behaviors to accelerate learning of high-level policies. We show how to acquire such priors from state-only motion capture demonstrations and explore several methods for integrating them into policy learning on transfer tasks. Our experimental results confirm that latent space priors provide significant gains in learning speed and final performance in a set of challenging sparse-reward environments with a complex, simulated humanoid. Videos, source code and pre-trained models are available at the corresponding project website at https://facebookresearch.github.io/latent-space-priors .
Hierarchical Skills for Efficient Exploration
Oct 20, 2021



In reinforcement learning, pre-trained low-level skills have the potential to greatly facilitate exploration. However, prior knowledge of the downstream task is required to strike the right balance between generality (fine-grained control) and specificity (faster learning) in skill design. In previous work on continuous control, the sensitivity of methods to this trade-off has not been addressed explicitly, as locomotion provides a suitable prior for navigation tasks, which have been of foremost interest. In this work, we analyze this trade-off for low-level policy pre-training with a new benchmark suite of diverse, sparse-reward tasks for bipedal robots. We alleviate the need for prior knowledge by proposing a hierarchical skill learning framework that acquires skills of varying complexity in an unsupervised manner. For utilization on downstream tasks, we present a three-layered hierarchical learning algorithm to automatically trade off between general and specific skills as required by the respective task. In our experiments, we show that our approach performs this trade-off effectively and achieves better results than current state-of-the-art methods for end- to-end hierarchical reinforcement learning and unsupervised skill discovery. Code and videos are available at https://facebookresearch.github.io/hsd3 .