 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoSchemaKG: Autonomous Knowledge Graph Construction through Dynamic Schema Induction from Web-Scale Corpora
May 29, 2025
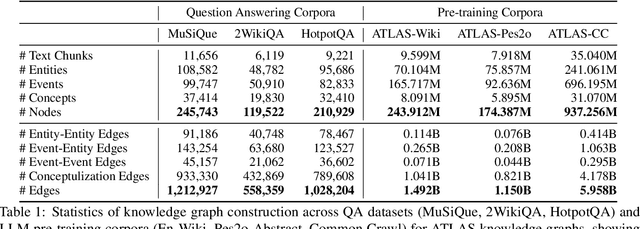
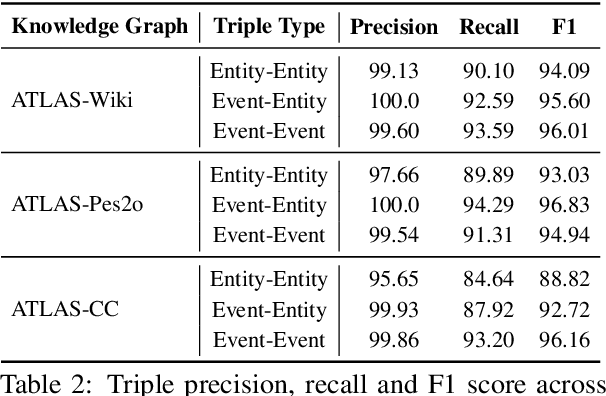

We present AutoSchemaKG, a framework for fully autonomous knowledge graph construction that eliminates the need for predefined schemas. Our system leverages large language models to simultaneously extract knowledge triples and induce comprehensive schemas directly from text, modeling both entities and events while employing conceptualization to organize instances into semantic categories. Processing over 50 million documents, we construct ATLAS (Automated Triple Linking And Schema induction), a family of knowledge graphs with 900+ million nodes and 5.9 billion edges. This approach outperforms state-of-the-art baselines on multi-hop QA tasks and enhances LLM factuality. Notably, our schema induction achieves 95\% semantic alignment with human-crafted schemas with zero manual intervention, demonstrating that billion-scale knowledge graphs with dynamically induced schemas can effectively complement parametric knowledge in large language models.
SimADFuzz: Simulation-Feedback Fuzz Testing for Autonomous Driving Systems
Dec 18, 2024

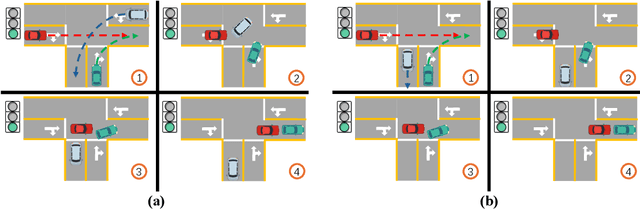

Autonomous driving systems (ADS) have achieved remarkable progress in recent years. However, ensuring their safety and reliability remains a critical challenge due to the complexity and uncertainty of driving scenarios. In this paper, we focus on simulation testing for ADS, where generating diverse and effective testing scenarios is a central task. Existing fuzz testing methods face limitations, such as overlooking the temporal and spatial dynamics of scenarios and failing to leverage simulation feedback (e.g., speed, acceleration and heading) to guide scenario selection and mutation. To address these issues, we propose SimADFuzz, a novel framework designed to generate high-quality scenarios that reveal violations in ADS behavior. Specifically, SimADFuzz employs violation prediction models, which evaluate the likelihood of ADS violations, to optimize scenario selection. Moreover, SimADFuzz proposes distance-guided mutation strategies to enhance interactions among vehicles in offspring scenarios, thereby triggering more edge-case behaviors of vehicles. Comprehensive experiments demonstrate that SimADFuzz outperforms state-of-the-art fuzzers by identifying 32 more unique violations, including 4 reproducible cases of vehicle-vehicle and vehicle-pedestrian collisions. These results demonstrate SimADFuzz's effectiveness in enhancing the robustness and safety of autonomous driving systems.
A Robust Anchor-based Method for Multi-Camera Pedestrian Localization
Oct 25, 2024



This paper addresses the problem of vision-based pedestrian localization, which estimates a pedestrian's location using images and camera parameters. In practice, however, calibrated camera parameters often deviate from the ground truth, leading to inaccuracies in localization. To address this issue, we propose an anchor-based method that leverages fixed-position anchors to reduce the impact of camera parameter errors. We provide a theoretical analysis that demonstrates the robustness of our approach. Experiments conducted on simulated, real-world, and public datasets show that our method significantly improves localization accuracy and remains resilient to noise in camera parameters, compared to methods without anchors.
Recent Advances in Data-driven Intelligent Control for Wireless Communication: A Comprehensive Survey
Aug 06, 2024The advent of next-generation wireless communication systems heralds an era characterized by high data rates, low latency, massive connectivity, and superior energy efficiency. These systems necessitate innovative and adaptive strategies for resource allocation and device behavior control in wireless networks. Traditional optimization-based methods have been found inadequate in meeting the complex demands of these emerging systems. As the volume of data continues to escalate, the integration of data-driven methods has become indispensable for enabling adaptive and intelligent control mechanisms in future wireless communication systems. This comprehensive survey explores recent advancements in data-driven methodologies applied to wireless communication networks. It focuses on developments over the past five years and their application to various control objectives within wireless cyber-physical systems. It encompasses critical areas such as link adaptation, user scheduling, spectrum allocation, beam management, power control, and the co-design of communication and control systems. We provide an in-depth exploration of the technical underpinnings that support these data-driven approaches, including the algorithms, models, and frameworks developed to enhance network performance and efficiency. We also examine the challenges that current data-driven algorithms face, particularly in the context of the dynamic and heterogeneous nature of next-generation wireless networks. The paper provides a critical analysis of these challenges and offers insights into potential solutions and future research directions. This includes discussing the adaptability, integration with 6G, and security of data-driven methods in the face of increasing network complexity and data volume.
Distributed Average Consensus via Noisy and Non-Coherent Over-the-Air Aggregation
Mar 11, 2024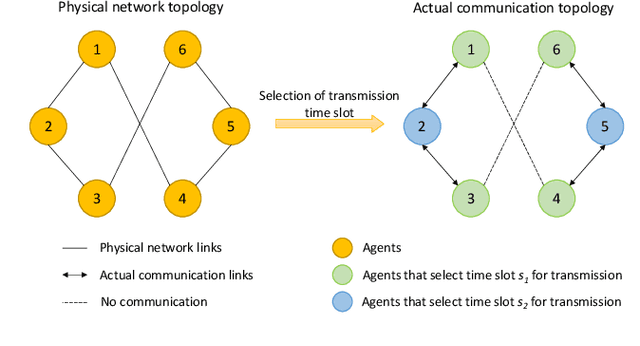
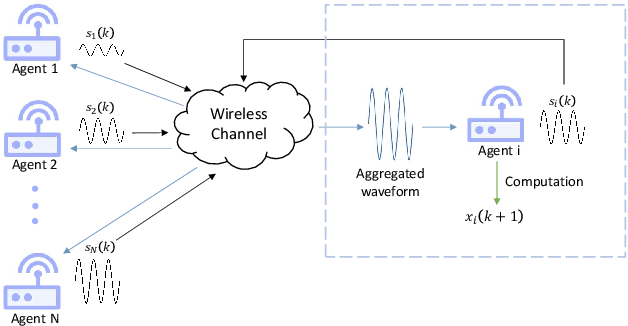
Over-the-air aggregation has attracted widespread attention for its potential advantages in task-oriented applications, such as distributed sensing, learning, and consensus. In this paper, we develop a communication-efficient distributed average consensus protocol by utilizing over-the-air aggregation, which exploits the superposition property of wireless channels rather than combat it. Noisy channels and non-coherent transmission are taken into account, and only half-duplex transceivers are required. We prove that the system can achieve average consensus in mean square and even almost surely under the proposed protocol. Furthermore, we extend the analysis to the scenarios with time-varying topology. Numerical simulation shows the effectiveness of the proposed protocol.
Over-the-air Federated Policy Gradient
Oct 25, 2023
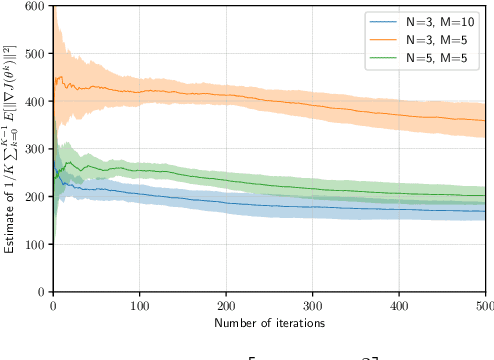
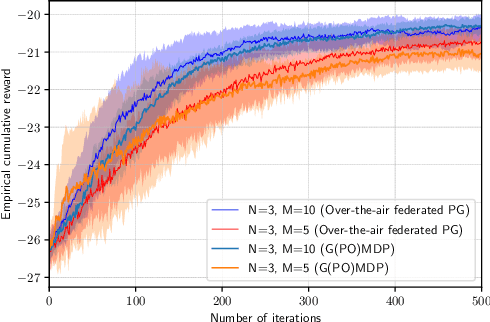
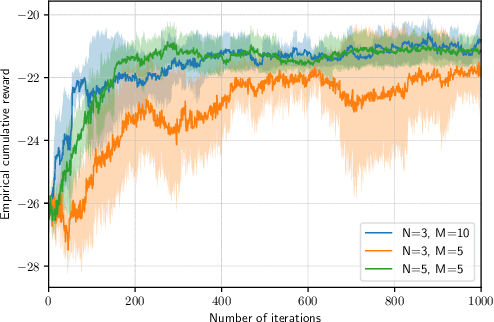
In recent years, over-the-air aggregation has been widely considered in large-scale distributed learning, optimization, and sensing. In this paper, we propose the over-the-air federated policy gradient algorithm, where all agents simultaneously broadcast an analog signal carrying local information to a common wireless channel, and a central controller uses the received aggregated waveform to update the policy parameters. We investigate the effect of noise and channel distortion on the convergence of the proposed algorithm, and establish the complexities of communication and sampling for finding an $\epsilon$-approximate stationary point. Finally, we present some simulation results to show the effectiveness of the algorithm.
Prototypical Model with Novel Information-theoretic Loss Function for Generalized Zero Shot Learning
Dec 06, 2021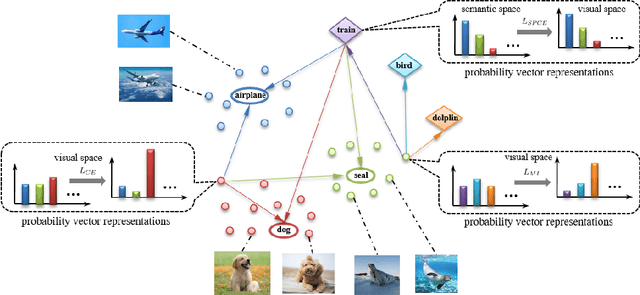
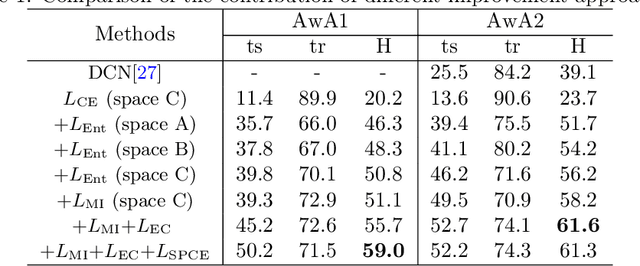
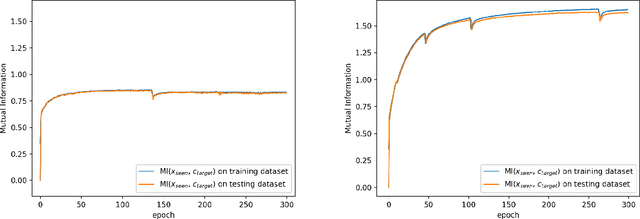

Generalized zero shot learning (GZSL) is still a technical challenge of deep learning as it has to recognize both source and target classes without data from target classes. To preserve the semantic relation between source and target classes when only trained with data from source classes, we address the quantification of the knowledge transfer and semantic relation from an information-theoretic viewpoint. To this end, we follow the prototypical model and format the variables of concern as a probability vector. Leveraging on the proposed probability vector representation, the information measurement such as mutual information and entropy, can be effectively evaluated with simple closed forms. We discuss the choice of common embedding space and distance function when using the prototypical model. Then We propose three information-theoretic loss functions for deterministic GZSL model: a mutual information loss to bridge seen data and target classes; an uncertainty-aware entropy constraint loss to prevent overfitting when using seen data to learn the embedding of target classes; a semantic preserving cross entropy loss to preserve the semantic relation when mapping the semantic representations to the common space. Simulation shows that, as a deterministic model, our proposed method obtains state of the art results on GZSL benchmark datasets. We achieve 21%-64% improvements over the baseline model -- deep calibration network (DCN) and for the first time demonstrate a deterministic model can perform as well as generative ones. Moreover, our proposed model is compatible with generative models. Simulation studies show that by incorporating with f-CLSWGAN, we obtain comparable results compared with advanced generative models.