 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Fourth Monocular Depth Estimation Challenge
Apr 24, 2025


This paper presents the results of the fourth edition of the Monocular Depth Estimation Challenge (MDEC), which focuses on zero-shot generalization to the SYNS-Patches benchmark, a dataset featuring challenging environments in both natural and indoor settings. In this edition, we revised the evaluation protocol to use least-squares alignment with two degrees of freedom to support disparity and affine-invariant predictions. We also revised the baselines and included popular off-the-shelf methods: Depth Anything v2 and Marigold. The challenge received a total of 24 submissions that outperformed the baselines on the test set; 10 of these included a report describing their approach, with most leading methods relying on affine-invariant predictions. The challenge winners improved the 3D F-Score over the previous edition's best result, raising it from 22.58% to 23.05%.
Recent Advances in Data-driven Intelligent Control for Wireless Communication: A Comprehensive Survey
Aug 06, 2024The advent of next-generation wireless communication systems heralds an era characterized by high data rates, low latency, massive connectivity, and superior energy efficiency. These systems necessitate innovative and adaptive strategies for resource allocation and device behavior control in wireless networks. Traditional optimization-based methods have been found inadequate in meeting the complex demands of these emerging systems. As the volume of data continues to escalate, the integration of data-driven methods has become indispensable for enabling adaptive and intelligent control mechanisms in future wireless communication systems. This comprehensive survey explores recent advancements in data-driven methodologies applied to wireless communication networks. It focuses on developments over the past five years and their application to various control objectives within wireless cyber-physical systems. It encompasses critical areas such as link adaptation, user scheduling, spectrum allocation, beam management, power control, and the co-design of communication and control systems. We provide an in-depth exploration of the technical underpinnings that support these data-driven approaches, including the algorithms, models, and frameworks developed to enhance network performance and efficiency. We also examine the challenges that current data-driven algorithms face, particularly in the context of the dynamic and heterogeneous nature of next-generation wireless networks. The paper provides a critical analysis of these challenges and offers insights into potential solutions and future research directions. This includes discussing the adaptability, integration with 6G, and security of data-driven methods in the face of increasing network complexity and data volume.
DINO-SD: Champion Solution for ICRA 2024 RoboDepth Challenge
May 27, 2024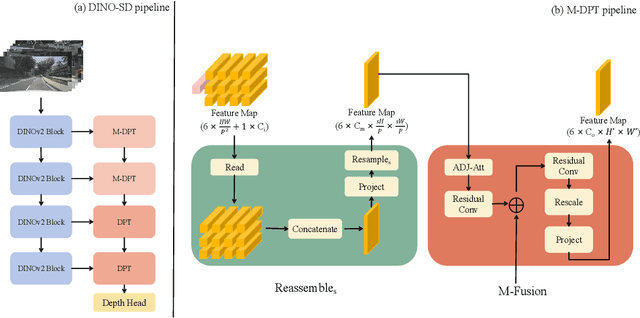

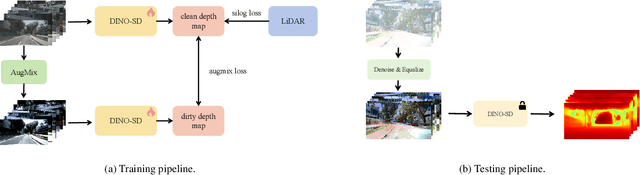
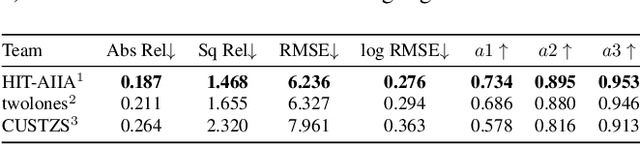
Surround-view depth estimation is a crucial task aims to acquire the depth maps of the surrounding views. It has many applications in real world scenarios such as autonomous driving, AR/VR and 3D reconstruction, etc. However, given that most of the data in the autonomous driving dataset is collected in daytime scenarios, this leads to poor depth model performance in the face of out-of-distribution(OoD) data. While some works try to improve the robustness of depth model under OoD data, these methods either require additional training data or lake generalizability. In this report, we introduce the DINO-SD, a novel surround-view depth estimation model. Our DINO-SD does not need additional data and has strong robustness. Our DINO-SD get the best performance in the track4 of ICRA 2024 RoboDepth Challenge.
The RoboDrive Challenge: Drive Anytime Anywhere in Any Condition
May 14, 2024



In the realm of autonomous driving, robust perception under out-of-distribution conditions is paramount for the safe deployment of vehicles. Challenges such as adverse weather, sensor malfunctions, and environmental unpredictability can severely impact the performance of autonomous systems. The 2024 RoboDrive Challenge was crafted to propel the development of driving perception technologies that can withstand and adapt to these real-world variabilities. Focusing on four pivotal tasks -- BEV detection, map segmentation, semantic occupancy prediction, and multi-view depth estimation -- the competition laid down a gauntlet to innovate and enhance system resilience against typical and atypical disturbances. This year's challenge consisted of five distinct tracks and attracted 140 registered teams from 93 institutes across 11 countries, resulting in nearly one thousand submissions evaluated through our servers. The competition culminated in 15 top-performing solutions, which introduced a range of innovative approaches including advanced data augmentation, multi-sensor fusion, self-supervised learning for error correction, and new algorithmic strategies to enhance sensor robustness. These contributions significantly advanced the state of the art, particularly in handling sensor inconsistencies and environmental variability. Participants, through collaborative efforts, pushed the boundaries of current technologies, showcasing their potential in real-world scenarios. Extensive evaluations and analyses provided insights into the effectiveness of these solutions, highlighting key trends and successful strategies for improving the resilience of driving perception systems. This challenge has set a new benchmark in the field, providing a rich repository of techniques expected to guide future research in this field.
Stealing Stable Diffusion Prior for Robust Monocular Depth Estimation
Mar 08, 2024Monocular depth estimation is a crucial task in computer vision. While existing methods have shown impressive results under standard conditions, they often face challenges in reliably performing in scenarios such as low-light or rainy conditions due to the absence of diverse training data. This paper introduces a novel approach named Stealing Stable Diffusion (SSD) prior for robust monocular depth estimation. The approach addresses this limitation by utilizing stable diffusion to generate synthetic images that mimic challenging conditions. Additionally, a self-training mechanism is introduced to enhance the model's depth estimation capability in such challenging environments. To enhance the utilization of the stable diffusion prior further, the DINOv2 encoder is integrated into the depth model architecture, enabling the model to leverage rich semantic priors and improve its scene understanding. Furthermore, a teacher loss is introduced to guide the student models in acquiring meaningful knowledge independently, thus reducing their dependency on the teacher models. The effectiveness of the approach is evaluated on nuScenes and Oxford RobotCar, two challenging public datasets, with the results showing the efficacy of the method. Source code and weights are available at: https://github.com/hitcslj/SSD.