 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHarnessing the Power of Vibration Motors to Develop Miniature Untethered Robotic Fishes
Jan 09, 2025



Miniature underwater robots play a crucial role in the exploration and development of marine resources, particularly in confined spaces and high-pressure deep-sea environments. This study presents the design, optimization, and performance of a miniature robotic fish, powered by the oscillation of bio-inspired fins. These fins feature a rigid-flexible hybrid structure and use an eccentric rotating mass (ERM) vibration motor as the excitation source to generate high-frequency unidirectional oscillations that induce acoustic streaming for propulsion. The drive mechanism, powered by miniature ERM vibration motors, eliminates the need for complex mechanical drive systems, enabling complete isolation of the entire drive system from the external environment and facilitating the miniaturization of the robotic fish. A compact, untethered robotic fish, measuring 85*60*45 mm^3, is equipped with three bio-inspired fins located at the pectoral and caudal positions. Experimental results demonstrate that the robotic fish achieves a maximum forward swimming speed of 1.36 body lengths (BL) per second powered by all fins and minimum turning radius of 0.6 BL when powered by a single fin. These results underscore the significance of employing the ERM vibration motor in advancing the development of highly maneuverable, miniature untethered underwater robots for various marine exploration tasks.
Distributed Average Consensus via Noisy and Non-Coherent Over-the-Air Aggregation
Mar 11, 2024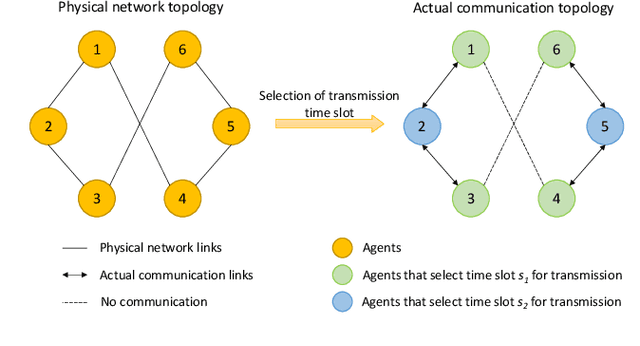
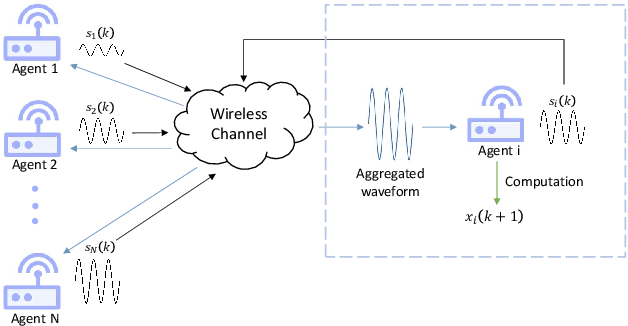
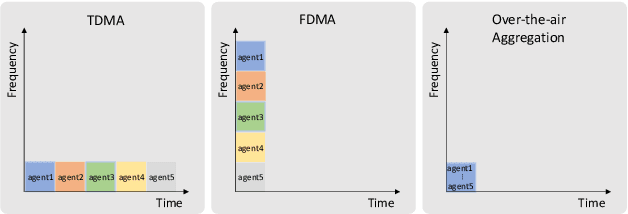
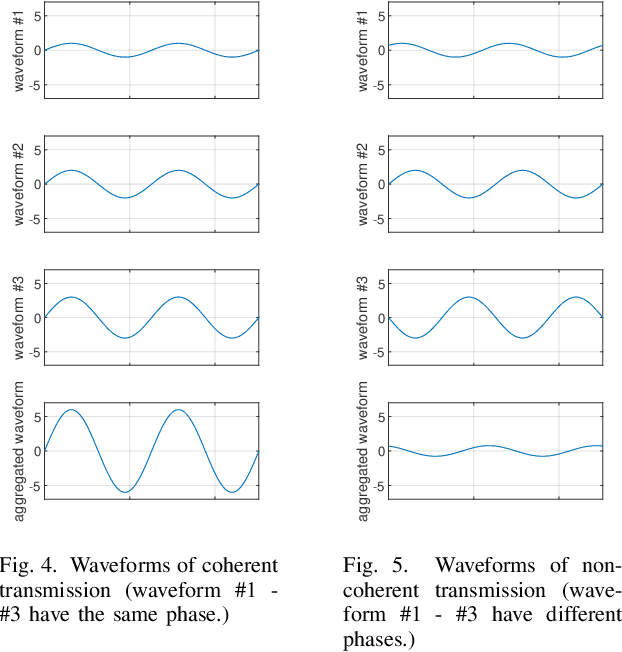
Over-the-air aggregation has attracted widespread attention for its potential advantages in task-oriented applications, such as distributed sensing, learning, and consensus. In this paper, we develop a communication-efficient distributed average consensus protocol by utilizing over-the-air aggregation, which exploits the superposition property of wireless channels rather than combat it. Noisy channels and non-coherent transmission are taken into account, and only half-duplex transceivers are required. We prove that the system can achieve average consensus in mean square and even almost surely under the proposed protocol. Furthermore, we extend the analysis to the scenarios with time-varying topology. Numerical simulation shows the effectiveness of the proposed protocol.
Branch and Bound in Mixed Integer Linear Programming Problems: A Survey of Techniques and Trends
Nov 05, 2021

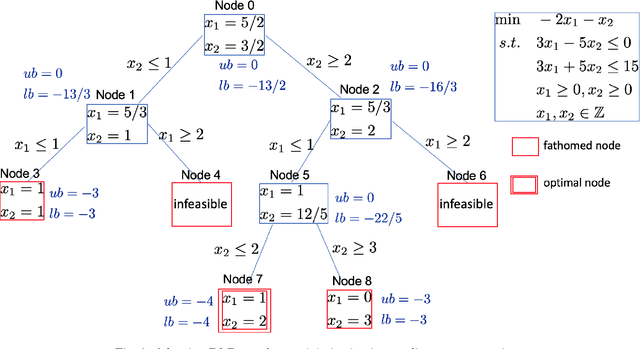
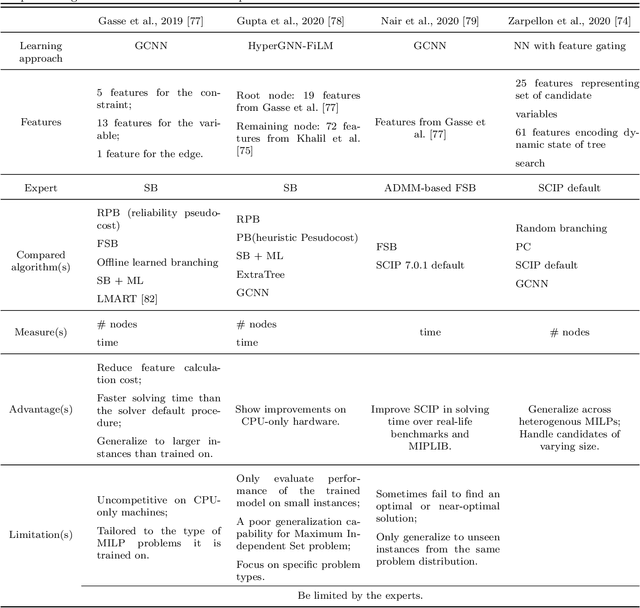
In this paper, we surveyed the existing literature studying different approaches and algorithms for the four critical components in the general branch and bound (B&B) algorithm, namely, branching variable selection, node selection, node pruning, and cutting-plane selection. However, the complexity of the B&B algorithm always grows exponentially with respect to the increase of the decision variable dimensions. In order to improve the speed of B&B algorithms, learning techniques have been introduced in this algorithm recently. We further surveyed how machine learning can be used to improve the four critical components in B&B algorithms. In general, a supervised learning method helps to generate a policy that mimics an expert but significantly improves the speed. An unsupervised learning method helps choose different methods based on the features. In addition, models trained with reinforcement learning can beat the expert policy, given enough training and a supervised initialization. Detailed comparisons between different algorithms have been summarized in our survey. Finally, we discussed some future research directions to accelerate and improve the algorithms further in the literature.