 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemCovert: Secure and Covert Video Transmission via Deep Semantic-Level Hiding
Dec 23, 2025Video semantic communication, praised for its transmission efficiency, still faces critical challenges related to privacy leakage. Traditional security techniques like steganography and encryption are challenging to apply since they are not inherently robust against semantic-level transformations and abstractions. Moreover, the temporal continuity of video enables framewise statistical modeling over extended periods, which increases the risk of exposing distributional anomalies and reconstructing hidden content. To address these challenges, we propose SemCovert, a deep semantic-level hiding framework for secure and covert video transmission. SemCovert introduces a pair of co-designed models, namely the semantic hiding model and the secret semantic extractor, which are seamlessly integrated into the semantic communication pipeline. This design enables authorized receivers to reliably recover hidden information, while keeping it imperceptible to regular users. To further improve resistance to analysis, we introduce a randomized semantic hiding strategy, which breaks the determinism of embedding and introduces unpredictable distribution patterns. The experimental results demonstrate that SemCovert effectively mitigates potential eavesdropping and detection risks while reliably concealing secret videos during transmission. Meanwhile, video quality suffers only minor degradation, preserving transmission fidelity. These results confirm SemCovert's effectiveness in enabling secure and covert transmission without compromising semantic communication performance.
Stealthy Dual-Trigger Backdoors: Attacking Prompt Tuning in LM-Empowered Graph Foundation Models
Oct 16, 2025The emergence of graph foundation models (GFMs), particularly those incorporating language models (LMs), has revolutionized graph learning and demonstrated remarkable performance on text-attributed graphs (TAGs). However, compared to traditional GNNs, these LM-empowered GFMs introduce unique security vulnerabilities during the unsecured prompt tuning phase that remain understudied in current research. Through empirical investigation, we reveal a significant performance degradation in traditional graph backdoor attacks when operating in attribute-inaccessible constrained TAG systems without explicit trigger node attribute optimization. To address this, we propose a novel dual-trigger backdoor attack framework that operates at both text-level and struct-level, enabling effective attacks without explicit optimization of trigger node text attributes through the strategic utilization of a pre-established text pool. Extensive experimental evaluations demonstrate that our attack maintains superior clean accuracy while achieving outstanding attack success rates, including scenarios with highly concealed single-trigger nodes. Our work highlights critical backdoor risks in web-deployed LM-empowered GFMs and contributes to the development of more robust supervision mechanisms for open-source platforms in the era of foundation models.
Gaussian Primitive Optimized Deformable Retinal Image Registration
Aug 23, 2025



Deformable retinal image registration is notoriously difficult due to large homogeneous regions and sparse but critical vascular features, which cause limited gradient signals in standard learning-based frameworks. In this paper, we introduce Gaussian Primitive Optimization (GPO), a novel iterative framework that performs structured message passing to overcome these challenges. After an initial coarse alignment, we extract keypoints at salient anatomical structures (e.g., major vessels) to serve as a minimal set of descriptor-based control nodes (DCN). Each node is modelled as a Gaussian primitive with trainable position, displacement, and radius, thus adapting its spatial influence to local deformation scales. A K-Nearest Neighbors (KNN) Gaussian interpolation then blends and propagates displacement signals from these information-rich nodes to construct a globally coherent displacement field; focusing interpolation on the top (K) neighbors reduces computational overhead while preserving local detail. By strategically anchoring nodes in high-gradient regions, GPO ensures robust gradient flow, mitigating vanishing gradient signal in textureless areas. The framework is optimized end-to-end via a multi-term loss that enforces both keypoint consistency and intensity alignment. Experiments on the FIRE dataset show that GPO reduces the target registration error from 6.2\,px to ~2.4\,px and increases the AUC at 25\,px from 0.770 to 0.938, substantially outperforming existing methods. The source code can be accessed via https://github.com/xintian-99/GPOreg.
AuditVotes: A Framework Towards More Deployable Certified Robustness for Graph Neural Networks
Mar 29, 2025Despite advancements in Graph Neural Networks (GNNs), adaptive attacks continue to challenge their robustness. Certified robustness based on randomized smoothing has emerged as a promising solution, offering provable guarantees that a model's predictions remain stable under adversarial perturbations within a specified range. However, existing methods face a critical trade-off between accuracy and robustness, as achieving stronger robustness requires introducing greater noise into the input graph. This excessive randomization degrades data quality and disrupts prediction consistency, limiting the practical deployment of certifiably robust GNNs in real-world scenarios where both accuracy and robustness are essential. To address this challenge, we propose \textbf{AuditVotes}, the first framework to achieve both high clean accuracy and certifiably robust accuracy for GNNs. It integrates randomized smoothing with two key components, \underline{au}gmentation and con\underline{dit}ional smoothing, aiming to improve data quality and prediction consistency. The augmentation, acting as a pre-processing step, de-noises the randomized graph, significantly improving data quality and clean accuracy. The conditional smoothing, serving as a post-processing step, employs a filtering function to selectively count votes, thereby filtering low-quality predictions and improving voting consistency. Extensive experimental results demonstrate that AuditVotes significantly enhances clean accuracy, certified robustness, and empirical robustness while maintaining high computational efficiency. Notably, compared to baseline randomized smoothing, AuditVotes improves clean accuracy by $437.1\%$ and certified accuracy by $409.3\%$ when the attacker can arbitrarily insert $20$ edges on the Cora-ML datasets, representing a substantial step toward deploying certifiably robust GNNs in real-world applications.
Splats in Splats: Embedding Invisible 3D Watermark within Gaussian Splatting
Dec 04, 2024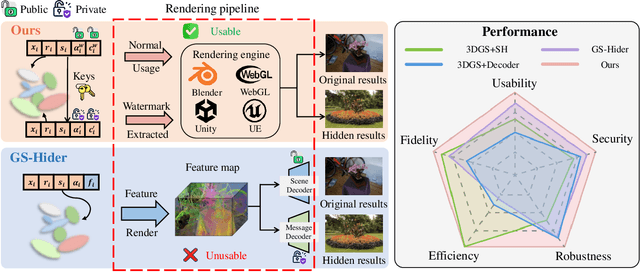
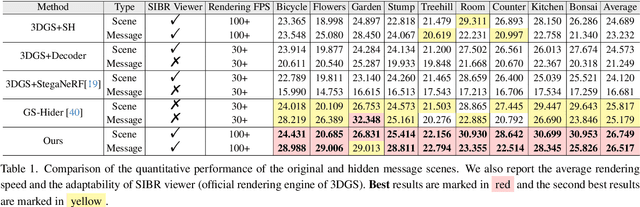
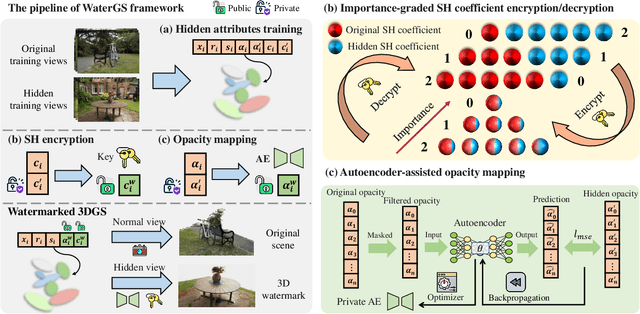
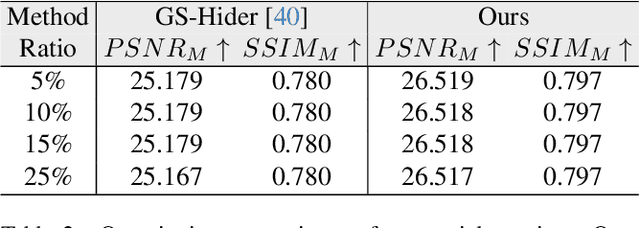
3D Gaussian splatting (3DGS) has demonstrated impressive 3D reconstruction performance with explicit scene representations. Given the widespread application of 3DGS in 3D reconstruction and generation tasks, there is an urgent need to protect the copyright of 3DGS assets. However, existing copyright protection techniques for 3DGS overlook the usability of 3D assets, posing challenges for practical deployment. Here we describe WaterGS, the first 3DGS watermarking framework that embeds 3D content in 3DGS itself without modifying any attributes of the vanilla 3DGS. To achieve this, we take a deep insight into spherical harmonics (SH) and devise an importance-graded SH coefficient encryption strategy to embed the hidden SH coefficients. Furthermore, we employ a convolutional autoencoder to establish a mapping between the original Gaussian primitives' opacity and the hidden Gaussian primitives' opacity. Extensive experiments indicate that WaterGS significantly outperforms existing 3D steganography techniques, with 5.31% higher scene fidelity and 3X faster rendering speed, while ensuring security, robustness, and user experience. Codes and data will be released at https://water-gs.github.io.
Collaborative AI in Sentiment Analysis: System Architecture, Data Prediction and Deployment Strategies
Oct 23, 2024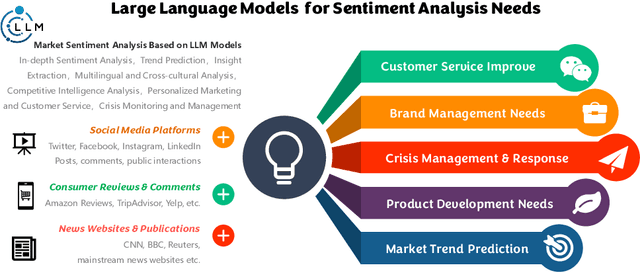
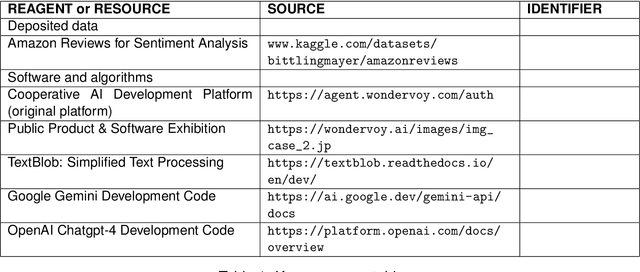
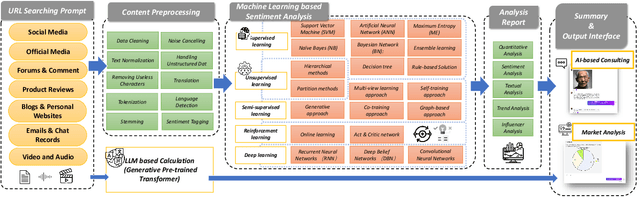
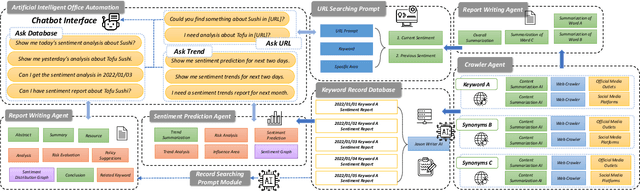
The advancement of large language model (LLM) based artificial intelligence technologies has been a game-changer, particularly in sentiment analysis. This progress has enabled a shift from highly specialized research environments to practical, widespread applications within the industry. However, integrating diverse AI models for processing complex multimodal data and the associated high costs of feature extraction presents significant challenges. Motivated by the marketing oriented software development +needs, our study introduces a collaborative AI framework designed to efficiently distribute and resolve tasks across various AI systems to address these issues. Initially, we elucidate the key solutions derived from our development process, highlighting the role of generative AI models like \emph{chatgpt}, \emph{google gemini} in simplifying intricate sentiment analysis tasks into manageable, phased objectives. Furthermore, we present a detailed case study utilizing our collaborative AI system in edge and cloud, showcasing its effectiveness in analyzing sentiments across diverse online media channels.
Defense-as-a-Service: Black-box Shielding against Backdoored Graph Models
Oct 07, 2024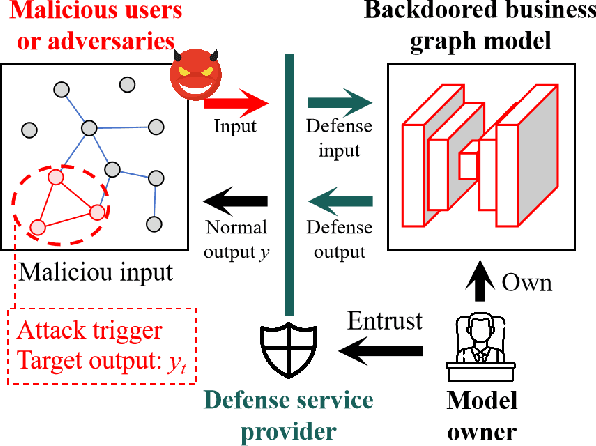
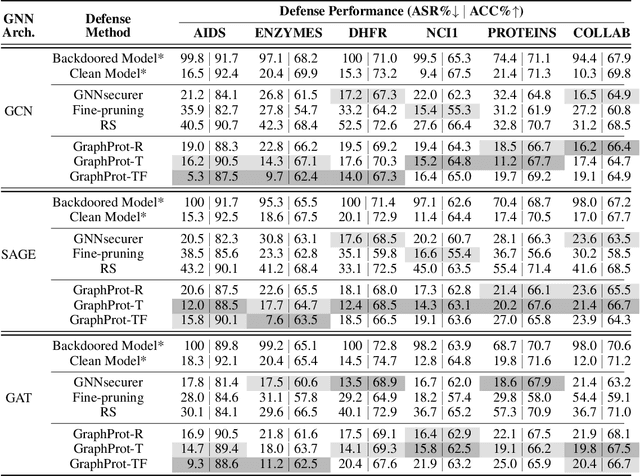
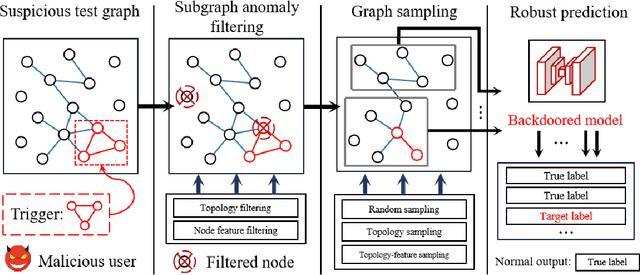

With the trend of large graph learning models, business owners tend to employ a model provided by a third party to deliver business services to users. However, these models might be backdoored, and malicious users can submit trigger-embedded inputs to manipulate the model predictions. Current graph backdoor defenses have several limitations: 1) depending on model-related details, 2) requiring additional model fine-tuning, and 3) relying upon extra explainability tools, all of which are infeasible under stringent privacy policies. To address those limitations, we propose GraphProt, which allows resource-constrained business owners to rely on third parties to avoid backdoor attacks on GNN-based graph classifiers. Our GraphProt is model-agnostic and only relies on the input graph. The key insight is to leverage subgraph information for prediction, thereby mitigating backdoor effects induced by triggers. GraphProt comprises two components: clustering-based trigger elimination and robust subgraph ensemble. Specifically, we first propose feature-topology clustering that aims to remove most of the anomalous subgraphs (triggers). Moreover, we design subgraph sampling strategies based on feature-topology clustering to build a robust classifier via majority vote. Experimental results across three backdoor attacks and six benchmark datasets demonstrate that GraphProt significantly reduces the backdoor attack success rate while preserving the model accuracy on regular graph classification tasks.
SFR-GNN: Simple and Fast Robust GNNs against Structural Attacks
Sep 01, 2024



Graph Neural Networks (GNNs) have demonstrated commendable performance for graph-structured data. Yet, GNNs are often vulnerable to adversarial structural attacks as embedding generation relies on graph topology. Existing efforts are dedicated to purifying the maliciously modified structure or applying adaptive aggregation, thereby enhancing the robustness against adversarial structural attacks. It is inevitable for a defender to consume heavy computational costs due to lacking prior knowledge about modified structures. To this end, we propose an efficient defense method, called Simple and Fast Robust Graph Neural Network (SFR-GNN), supported by mutual information theory. The SFR-GNN first pre-trains a GNN model using node attributes and then fine-tunes it over the modified graph in the manner of contrastive learning, which is free of purifying modified structures and adaptive aggregation, thus achieving great efficiency gains. Consequently, SFR-GNN exhibits a 24%--162% speedup compared to advanced robust models, demonstrating superior robustness for node classification tasks.
MemWarp: Discontinuity-Preserving Cardiac Registration with Memorized Anatomical Filters
Jul 10, 2024Many existing learning-based deformable image registration methods impose constraints on deformation fields to ensure they are globally smooth and continuous. However, this assumption does not hold in cardiac image registration, where different anatomical regions exhibit asymmetric motions during respiration and movements due to sliding organs within the chest. Consequently, such global constraints fail to accommodate local discontinuities across organ boundaries, potentially resulting in erroneous and unrealistic displacement fields. In this paper, we address this issue with MemWarp, a learning framework that leverages a memory network to store prototypical information tailored to different anatomical regions. MemWarp is different from earlier approaches in two main aspects: firstly, by decoupling feature extraction from similarity matching in moving and fixed images, it facilitates more effective utilization of feature maps; secondly, despite its capability to preserve discontinuities, it eliminates the need for segmentation masks during model inference. In experiments on a publicly available cardiac dataset, our method achieves considerable improvements in registration accuracy and producing realistic deformations, outperforming state-of-the-art methods with a remarkable 7.1\% Dice score improvement over the runner-up semi-supervised method. Source code will be available at https://github.com/tinymilky/Mem-Warp.
OpticGAI: Generative AI-aided Deep Reinforcement Learning for Optical Networks Optimization
Jun 22, 2024



Deep Reinforcement Learning (DRL) is regarded as a promising tool for optical network optimization. However, the flexibility and efficiency of current DRL-based solutions for optical network optimization require further improvement. Currently, generative models have showcased their significant performance advantages across various domains. In this paper, we introduce OpticGAI, the AI-generated policy design paradigm for optical networks. In detail, it is implemented as a novel DRL framework that utilizes generative models to learn the optimal policy network. Furthermore, we assess the performance of OpticGAI on two NP-hard optical network problems, Routing and Wavelength Assignment (RWA) and dynamic Routing, Modulation, and Spectrum Allocation (RMSA), to show the feasibility of the AI-generated policy paradigm. Simulation results have shown that OpticGAI achieves the highest reward and the lowest blocking rate of both RWA and RMSA problems. OpticGAI poses a promising direction for future research on generative AI-enhanced flexible optical network optimization.