 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLyapunov Stability-Aware Stackelberg Game for Low-Altitude Economy: A Control-Oriented Pruning-Based DRL Approach
Feb 01, 2026With the rapid expansion of the low-altitude economy, Unmanned Aerial Vehicles (UAVs) serve as pivotal aerial base stations supporting diverse services from users, ranging from latency-sensitive critical missions to bandwidth-intensive data streaming. However, the efficacy of such heterogeneous networks is often compromised by the conflict between limited onboard resources and stringent stability requirements. Moving beyond traditional throughput-centric designs, we propose a Sensing-Communication-Computing-Control closed-loop framework that explicitly models the impact of communication latency on physical control stability. To guarantee mission reliability, we leverage the Lyapunov stability theory to derive an intrinsic mapping between the state evolution of the control system and communication constraints, transforming abstract stability requirements into quantifiable resource boundaries. Then, we formulate the resource allocation problem as a Stackelberg game, where UAVs (as leaders) dynamically price resources to balance load and ensure stability, while users (as followers) optimize requests based on service urgency. Furthermore, addressing the prohibitive computational overhead of standard Deep Reinforcement Learning (DRL) on energy-constrained edge platforms, we propose a novel and lightweight pruning-based Proximal Policy Optimization (PPO) algorithm. By integrating a dynamic structured pruning mechanism, the proposed algorithm significantly compresses the neural network scale during training, enabling the UAV to rapidly approximate the game equilibrium with minimal inference latency. Simulation results demonstrate that the proposed scheme effectively secures control loop stability while maximizing system utility in dynamic low-altitude environments.
Diffusion-based Auction Mechanism for Efficient Resource Management in 6G-enabled Vehicular Metaverses
Nov 01, 2024The rise of 6G-enable Vehicular Metaverses is transforming the automotive industry by integrating immersive, real-time vehicular services through ultra-low latency and high bandwidth connectivity. In 6G-enable Vehicular Metaverses, vehicles are represented by Vehicle Twins (VTs), which serve as digital replicas of physical vehicles to support real-time vehicular applications such as large Artificial Intelligence (AI) model-based Augmented Reality (AR) navigation, called VT tasks. VT tasks are resource-intensive and need to be offloaded to ground Base Stations (BSs) for fast processing. However, high demand for VT tasks and limited resources of ground BSs, pose significant resource allocation challenges, particularly in densely populated urban areas like intersections. As a promising solution, Unmanned Aerial Vehicles (UAVs) act as aerial edge servers to dynamically assist ground BSs in handling VT tasks, relieving resource pressure on ground BSs. However, due to high mobility of UAVs, there exists information asymmetry regarding VT task demands between UAVs and ground BSs, resulting in inefficient resource allocation of UAVs. To address these challenges, we propose a learning-based Modified Second-Bid (MSB) auction mechanism to optimize resource allocation between ground BSs and UAVs by accounting for VT task latency and accuracy. Moreover, we design a diffusion-based reinforcement learning algorithm to optimize the price scaling factor, maximizing the total surplus of resource providers and minimizing VT task latency. Finally, simulation results demonstrate that the proposed diffusion-based MSB auction outperforms traditional baselines, providing better resource distribution and enhanced service quality for vehicular users.
Multi-attribute Auction-based Resource Allocation for Twins Migration in Vehicular Metaverses: A GPT-based DRL Approach
Jun 08, 2024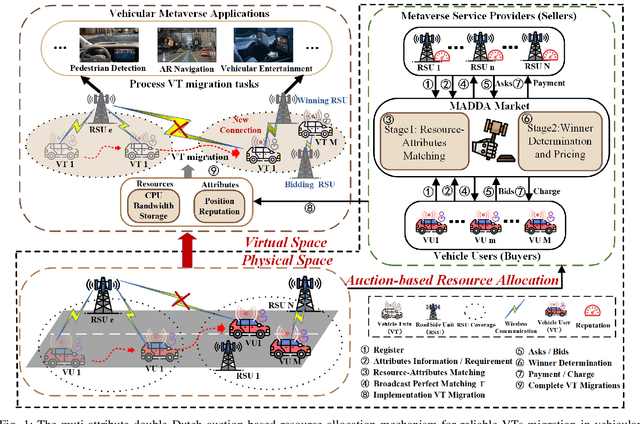
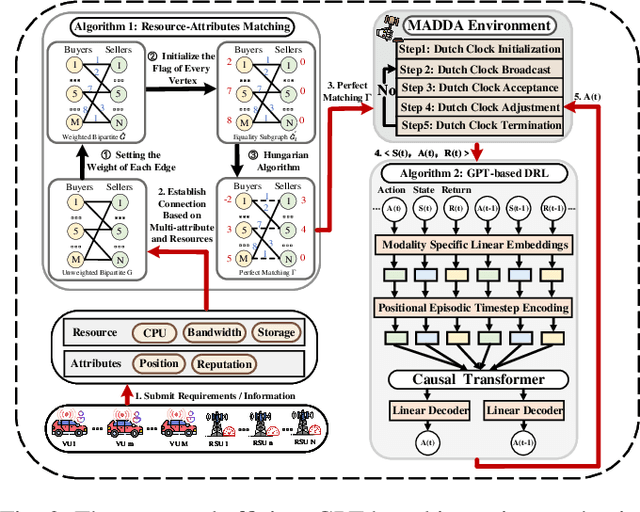
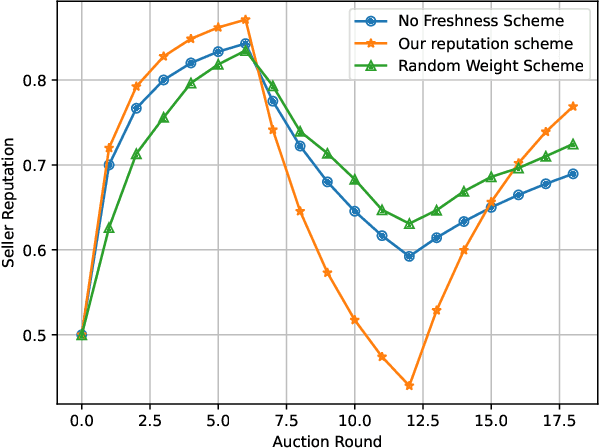
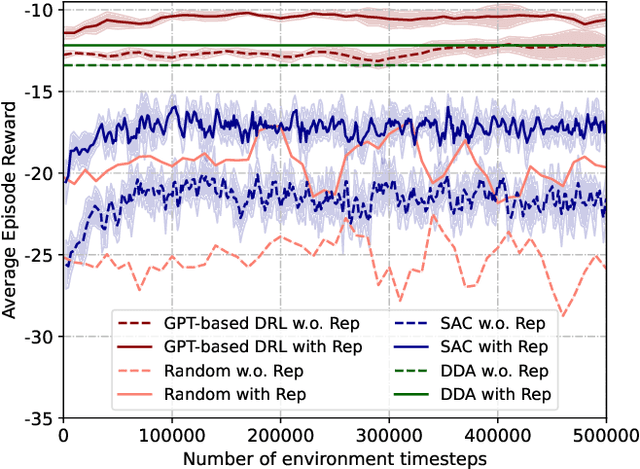
Vehicular Metaverses are developed to enhance the modern automotive industry with an immersive and safe experience among connected vehicles and roadside infrastructures, e.g., RoadSide Units (RSUs). For seamless synchronization with virtual spaces, Vehicle Twins (VTs) are constructed as digital representations of physical entities. However, resource-intensive VTs updating and high mobility of vehicles require intensive computation, communication, and storage resources, especially for their migration among RSUs with limited coverages. To address these issues, we propose an attribute-aware auction-based mechanism to optimize resource allocation during VTs migration by considering both price and non-monetary attributes, e.g., location and reputation. In this mechanism, we propose a two-stage matching for vehicular users and Metaverse service providers in multi-attribute resource markets. First, the resource attributes matching algorithm obtains the resource attributes perfect matching, namely, buyers and sellers can participate in a double Dutch auction (DDA). Then, we train a DDA auctioneer using a generative pre-trained transformer (GPT)-based deep reinforcement learning (DRL) algorithm to adjust the auction clocks efficiently during the auction process. We compare the performance of social welfare and auction information exchange costs with state-of-the-art baselines under different settings. Simulation results show that our proposed GPT-based DRL auction schemes have better performance than others.
Diffusion-based Reinforcement Learning for Dynamic UAV-assisted Vehicle Twins Migration in Vehicular Metaverses
Jun 08, 2024



Air-ground integrated networks can relieve communication pressure on ground transportation networks and provide 6G-enabled vehicular Metaverses services offloading in remote areas with sparse RoadSide Units (RSUs) coverage and downtown areas where users have a high demand for vehicular services. Vehicle Twins (VTs) are the digital twins of physical vehicles to enable more immersive and realistic vehicular services, which can be offloaded and updated on RSU, to manage and provide vehicular Metaverses services to passengers and drivers. The high mobility of vehicles and the limited coverage of RSU signals necessitate VT migration to ensure service continuity when vehicles leave the signal coverage of RSUs. However, uneven VT task migration might overload some RSUs, which might result in increased service latency, and thus impactive immersive experiences for users. In this paper, we propose a dynamic Unmanned Aerial Vehicle (UAV)-assisted VT migration framework in air-ground integrated networks, where UAVs act as aerial edge servers to assist ground RSUs during VT task offloading. In this framework, we propose a diffusion-based Reinforcement Learning (RL) algorithm, which can efficiently make immersive VT migration decisions in UAV-assisted vehicular networks. To balance the workload of RSUs and improve VT migration quality, we design a novel dynamic path planning algorithm based on a heuristic search strategy for UAVs. Simulation results show that the diffusion-based RL algorithm with UAV-assisted performs better than other baseline schemes.