 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-Driven Learning-Based Physical Layer Authentication for Mobile Wi-Fi Devices
Mar 20, 2026The rise of wireless technologies has made the Internet of Things (IoT) ubiquitous, but the broadcast nature of wireless communications exposes IoT to authentication risks. Physical layer authentication (PLA) offers a promising solution by leveraging unique characteristics of wireless channels. As a common approach in PLA, hypothesis testing yields a theoretically optimal Neyman-Pearson (NP) detector, but its reliance on channel statistics limits its practicality in real-world scenarios. In contrast, deep learning-based PLA approaches are practical but tend to be not optimal. To address these challenges, we proposed a learning-based PLA scheme driven by hypothesis testing and conducted extensive simulations and experimental evaluations using Wi-Fi. Specifically, we incorporated conditional statistical models into the hypothesis testing framework to derive a theoretically optimal NP detector. Building on this, we developed LiteNP-Net, a lightweight neural network driven by the NP detector. Simulation results demonstrated that LiteNP-Net could approach the performance of the NP detector even without prior knowledge of the channel statistics. To further assess its effectiveness in practical environments, we deployed an experimental testbed using Wi-Fi IoT development kits in various real-world scenarios. Experimental results demonstrated that the LiteNP-Net outperformed the conventional correlation-based method as well as state-of-the-art Siamese-based methods.
Channel Prediction-Based Physical Layer Authentication under Consecutive Spoofing Attacks
Mar 20, 2026Wireless networks are highly vulnerable to spoofing attacks, especially when attackers transmit consecutive spoofing packets. Conventional physical layer authentication (PLA) methods have mostly focused on single-packet spoofing attack. However, under consecutive spoofing attacks, they become ineffective due to channel evolution caused by device mobility and channel fading. To address this challenge, we propose a channel prediction-based PLA framework. Specifically, a Transformer-based channel prediction module is employed to predict legitimate CSI measurements during spoofing interval, and the input of channel prediction module is adaptively updated with predicted or observed CSI measurements based on the authentication decision to ensure robustness against sustained spoofing. Simulation results under Rayleigh fading channels demonstrate that the proposed approach achieves low prediction error and significantly higher authentication accuracy than conventional benchmark, maintaining robustness even under extended spoofing attacks.
To What Extent Do Token-Level Representations from Pathology Foundation Models Improve Dense Prediction?
Feb 03, 2026Pathology foundation models (PFMs) have rapidly advanced and are becoming a common backbone for downstream clinical tasks, offering strong transferability across tissues and institutions. However, for dense prediction (e.g., segmentation), practical deployment still lacks a clear, reproducible understanding of how different PFMs behave across datasets and how adaptation choices affect performance and stability. We present PFM-DenseBench, a large-scale benchmark for dense pathology prediction, evaluating 17 PFMs across 18 public segmentation datasets. Under a unified protocol, we systematically assess PFMs with multiple adaptation and fine-tuning strategies, and derive insightful, practice-oriented findings on when and why different PFMs and tuning choices succeed or fail across heterogeneous datasets. We release containers, configs, and dataset cards to enable reproducible evaluation and informed PFM selection for real-world dense pathology tasks. Project Website: https://m4a1tastegood.github.io/PFM-DenseBench
On-the-fly Large-scale 3D Reconstruction from Multi-Camera Rigs
Dec 09, 2025Recent advances in 3D Gaussian Splatting (3DGS) have enabled efficient free-viewpoint rendering and photorealistic scene reconstruction. While on-the-fly extensions of 3DGS have shown promise for real-time reconstruction from monocular RGB streams, they often fail to achieve complete 3D coverage due to the limited field of view (FOV). Employing a multi-camera rig fundamentally addresses this limitation. In this paper, we present the first on-the-fly 3D reconstruction framework for multi-camera rigs. Our method incrementally fuses dense RGB streams from multiple overlapping cameras into a unified Gaussian representation, achieving drift-free trajectory estimation and efficient online reconstruction. We propose a hierarchical camera initialization scheme that enables coarse inter-camera alignment without calibration, followed by a lightweight multi-camera bundle adjustment that stabilizes trajectories while maintaining real-time performance. Furthermore, we introduce a redundancy-free Gaussian sampling strategy and a frequency-aware optimization scheduler to reduce the number of Gaussian primitives and the required optimization iterations, thereby maintaining both efficiency and reconstruction fidelity. Our method reconstructs hundreds of meters of 3D scenes within just 2 minutes using only raw multi-camera video streams, demonstrating unprecedented speed, robustness, and Fidelity for on-the-fly 3D scene reconstruction.
Practical Physical Layer Authentication for Mobile Scenarios Using a Synthetic Dataset Enhanced Deep Learning Approach
Aug 28, 2025The Internet of Things (IoT) is ubiquitous thanks to the rapid development of wireless technologies. However, the broadcast nature of wireless transmissions results in great vulnerability to device authentication. Physical layer authentication emerges as a promising approach by exploiting the unique channel characteristics. However, a practical scheme applicable to dynamic channel variations is still missing. In this paper, we proposed a deep learning-based physical layer channel state information (CSI) authentication for mobile scenarios and carried out comprehensive simulation and experimental evaluation using IEEE 802.11n. Specifically, a synthetic training dataset was generated based on the WLAN TGn channel model and the autocorrelation and the distance correlation of the channel, which can significantly reduce the overhead of manually collecting experimental datasets. A convolutional neural network (CNN)-based Siamese network was exploited to learn the temporal and spatial correlation between the CSI pair and output a score to measure their similarity. We adopted a synergistic methodology involving both simulation and experimental evaluation. The experimental testbed consisted of WiFi IoT development kits and a few typical scenarios were specifically considered. Both simulation and experimental evaluation demonstrated excellent generalization performance of our proposed deep learning-based approach and excellent authentication performance. Demonstrated by our practical measurement results, our proposed scheme improved the area under the curve (AUC) by 0.03 compared to the fully connected network-based (FCN-based) Siamese model and by 0.06 compared to the correlation-based benchmark algorithm.
Splats in Splats: Embedding Invisible 3D Watermark within Gaussian Splatting
Dec 04, 2024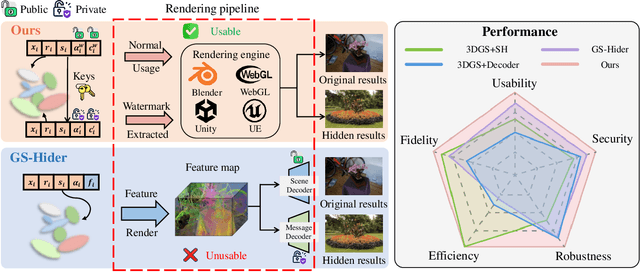
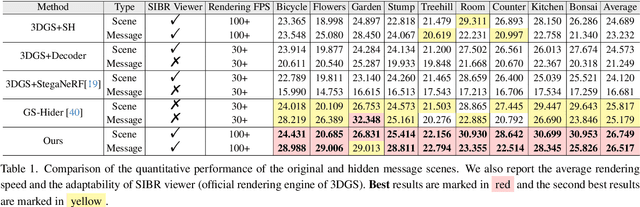
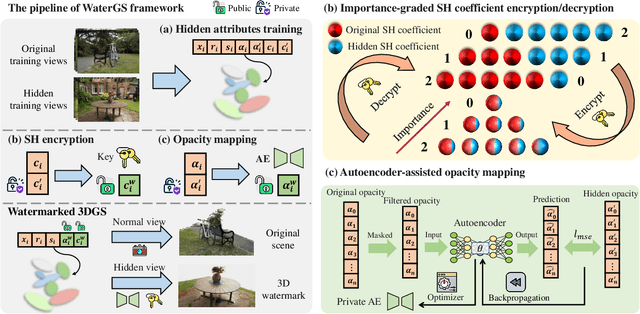
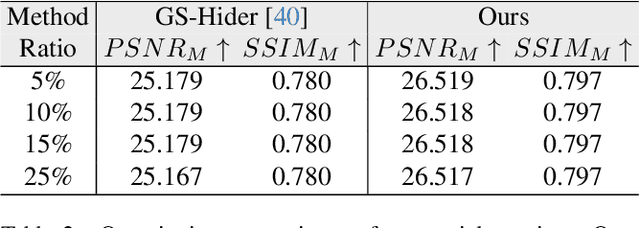
3D Gaussian splatting (3DGS) has demonstrated impressive 3D reconstruction performance with explicit scene representations. Given the widespread application of 3DGS in 3D reconstruction and generation tasks, there is an urgent need to protect the copyright of 3DGS assets. However, existing copyright protection techniques for 3DGS overlook the usability of 3D assets, posing challenges for practical deployment. Here we describe WaterGS, the first 3DGS watermarking framework that embeds 3D content in 3DGS itself without modifying any attributes of the vanilla 3DGS. To achieve this, we take a deep insight into spherical harmonics (SH) and devise an importance-graded SH coefficient encryption strategy to embed the hidden SH coefficients. Furthermore, we employ a convolutional autoencoder to establish a mapping between the original Gaussian primitives' opacity and the hidden Gaussian primitives' opacity. Extensive experiments indicate that WaterGS significantly outperforms existing 3D steganography techniques, with 5.31% higher scene fidelity and 3X faster rendering speed, while ensuring security, robustness, and user experience. Codes and data will be released at https://water-gs.github.io.
PRTGS: Precomputed Radiance Transfer of Gaussian Splats for Real-Time High-Quality Relighting
Aug 07, 2024We proposed Precomputed RadianceTransfer of GaussianSplats (PRTGS), a real-time high-quality relighting method for Gaussian splats in low-frequency lighting environments that captures soft shadows and interreflections by precomputing 3D Gaussian splats' radiance transfer. Existing studies have demonstrated that 3D Gaussian splatting (3DGS) outperforms neural fields' efficiency for dynamic lighting scenarios. However, the current relighting method based on 3DGS still struggles to compute high-quality shadow and indirect illumination in real time for dynamic light, leading to unrealistic rendering results. We solve this problem by precomputing the expensive transport simulations required for complex transfer functions like shadowing, the resulting transfer functions are represented as dense sets of vectors or matrices for every Gaussian splat. We introduce distinct precomputing methods tailored for training and rendering stages, along with unique ray tracing and indirect lighting precomputation techniques for 3D Gaussian splats to accelerate training speed and compute accurate indirect lighting related to environment light. Experimental analyses demonstrate that our approach achieves state-of-the-art visual quality while maintaining competitive training times and allows high-quality real-time (30+ fps) relighting for dynamic light and relatively complex scenes at 1080p resolution.
SpikeGS: Reconstruct 3D scene via fast-moving bio-inspired sensors
Jul 04, 2024
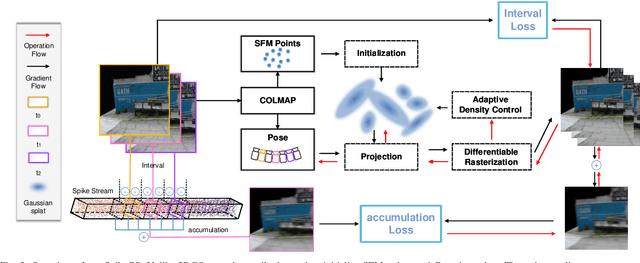

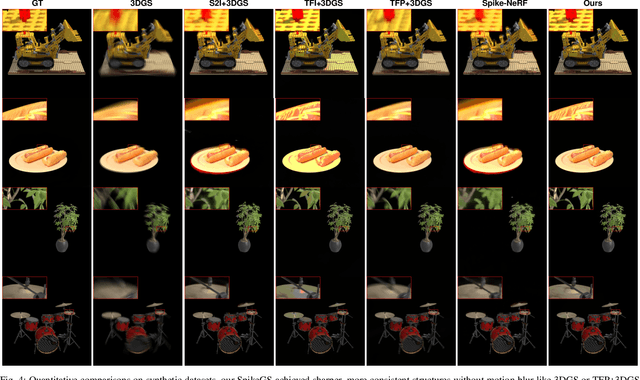
3D Gaussian Splatting (3DGS) demonstrates unparalleled superior performance in 3D scene reconstruction. However, 3DGS heavily relies on the sharp images. Fulfilling this requirement can be challenging in real-world scenarios especially when the camera moves fast, which severely limits the application of 3DGS. To address these challenges, we proposed Spike Gausian Splatting (SpikeGS), the first framework that integrates the spike streams into 3DGS pipeline to reconstruct 3D scenes via a fast-moving bio-inspired camera. With accumulation rasterization, interval supervision, and a specially designed pipeline, SpikeGS extracts detailed geometry and texture from high temporal resolution but texture lacking spike stream, reconstructs 3D scenes captured in 1 second. Extensive experiments on multiple synthetic and real-world datasets demonstrate the superiority of SpikeGS compared with existing spike-based and deblur 3D scene reconstruction methods. Codes and data will be released soon.
SCSim: A Realistic Spike Cameras Simulator
May 27, 2024
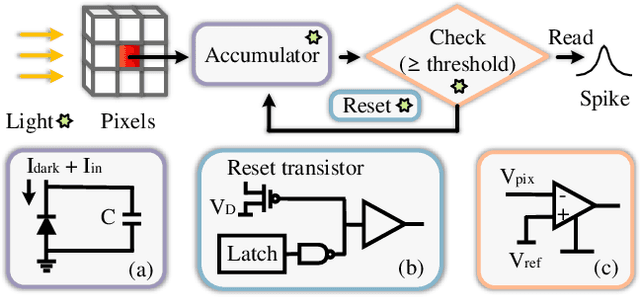
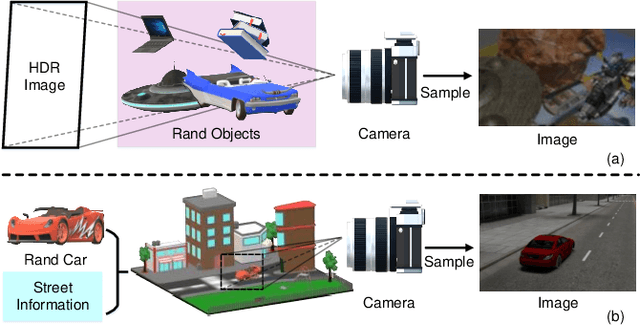

Spike cameras, with their exceptional temporal resolution, are revolutionizing high-speed visual applications. Large-scale synthetic datasets have significantly accelerated the development of these cameras, particularly in reconstruction and optical flow. However, current synthetic datasets for spike cameras lack sophistication. Addressing this gap, we introduce SCSim, a novel and more realistic spike camera simulator with a comprehensive noise model. SCSim is adept at autonomously generating driving scenarios and synthesizing corresponding spike streams. To enhance the fidelity of these streams, we've developed a comprehensive noise model tailored to the unique circuitry of spike cameras. Our evaluations demonstrate that SCSim outperforms existing simulation methods in generating authentic spike streams. Crucially, SCSim simplifies the creation of datasets, thereby greatly advancing spike-based visual tasks like reconstruction. Our project refers to https://github.com/Acnext/SCSim.
Spike-NeRF: Neural Radiance Field Based On Spike Camera
Mar 25, 2024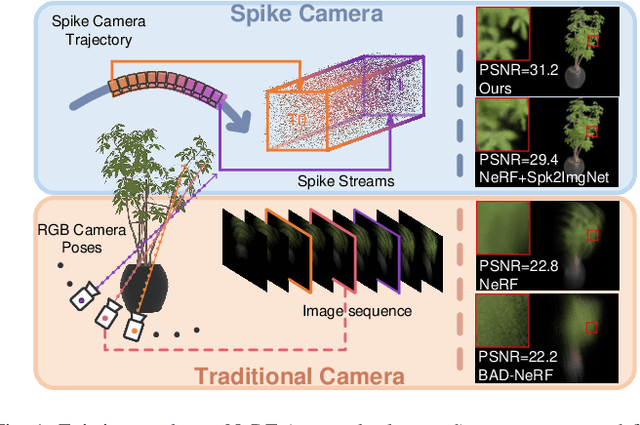
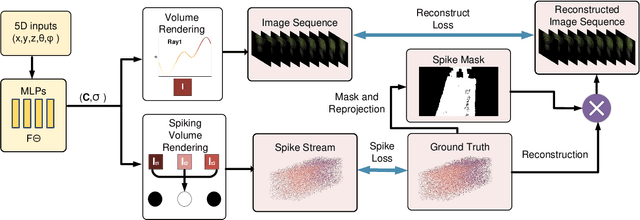
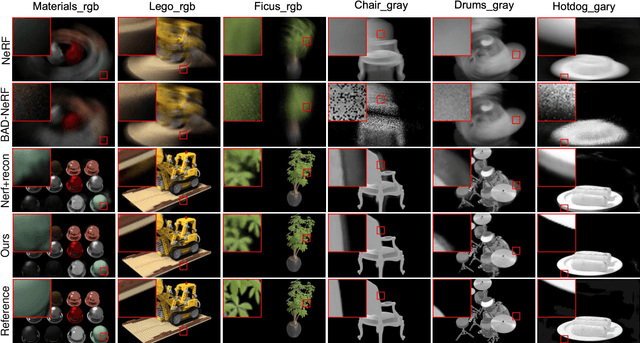
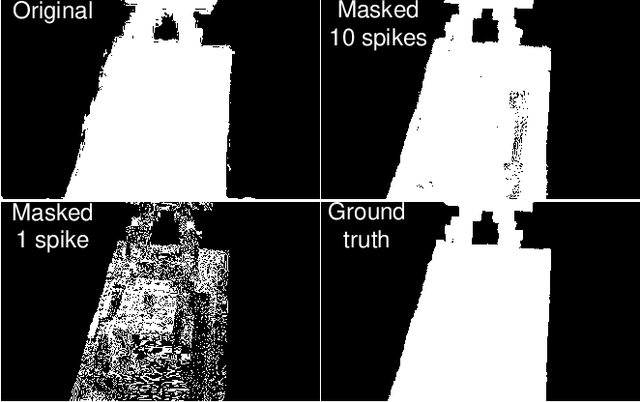
As a neuromorphic sensor with high temporal resolution, spike cameras offer notable advantages over traditional cameras in high-speed vision applications such as high-speed optical estimation, depth estimation, and object tracking. Inspired by the success of the spike camera, we proposed Spike-NeRF, the first Neural Radiance Field derived from spike data, to achieve 3D reconstruction and novel viewpoint synthesis of high-speed scenes. Instead of the multi-view images at the same time of NeRF, the inputs of Spike-NeRF are continuous spike streams captured by a moving spike camera in a very short time. To reconstruct a correct and stable 3D scene from high-frequency but unstable spike data, we devised spike masks along with a distinctive loss function. We evaluate our method qualitatively and numerically on several challenging synthetic scenes generated by blender with the spike camera simulator. Our results demonstrate that Spike-NeRF produces more visually appealing results than the existing methods and the baseline we proposed in high-speed scenes. Our code and data will be released soon.