 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGT-Rain Single Image Deraining Challenge Report
Mar 18, 2024


This report reviews the results of the GT-Rain challenge on single image deraining at the UG2+ workshop at CVPR 2023. The aim of this competition is to study the rainy weather phenomenon in real world scenarios, provide a novel real world rainy image dataset, and to spark innovative ideas that will further the development of single image deraining methods on real images. Submissions were trained on the GT-Rain dataset and evaluated on an extension of the dataset consisting of 15 additional scenes. Scenes in GT-Rain are comprised of real rainy image and ground truth image captured moments after the rain had stopped. 275 participants were registered in the challenge and 55 competed in the final testing phase.
Enhancing Diffusion Models with 3D Perspective Geometry Constraints
Dec 01, 2023While perspective is a well-studied topic in art, it is generally taken for granted in images. However, for the recent wave of high-quality image synthesis methods such as latent diffusion models, perspective accuracy is not an explicit requirement. Since these methods are capable of outputting a wide gamut of possible images, it is difficult for these synthesized images to adhere to the principles of linear perspective. We introduce a novel geometric constraint in the training process of generative models to enforce perspective accuracy. We show that outputs of models trained with this constraint both appear more realistic and improve performance of downstream models trained on generated images. Subjective human trials show that images generated with latent diffusion models trained with our constraint are preferred over images from the Stable Diffusion V2 model 70% of the time. SOTA monocular depth estimation models such as DPT and PixelFormer, fine-tuned on our images, outperform the original models trained on real images by up to 7.03% in RMSE and 19.3% in SqRel on the KITTI test set for zero-shot transfer.
Stain-free, rapid, and quantitative viral plaque assay using deep learning and holography
Jun 30, 2022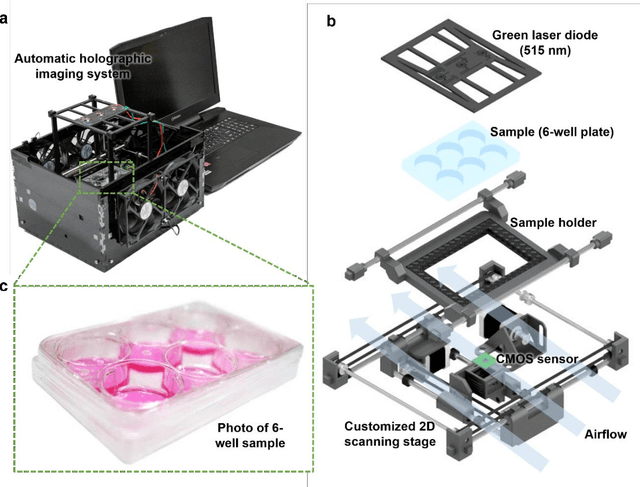
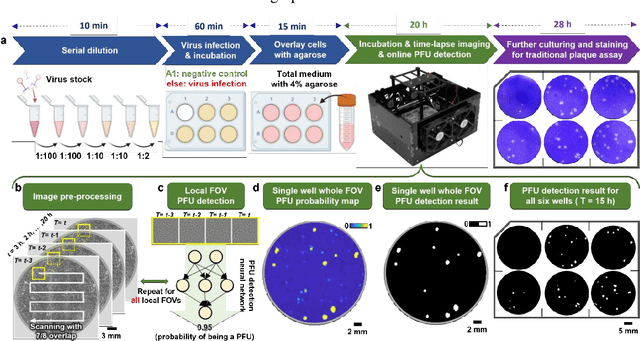
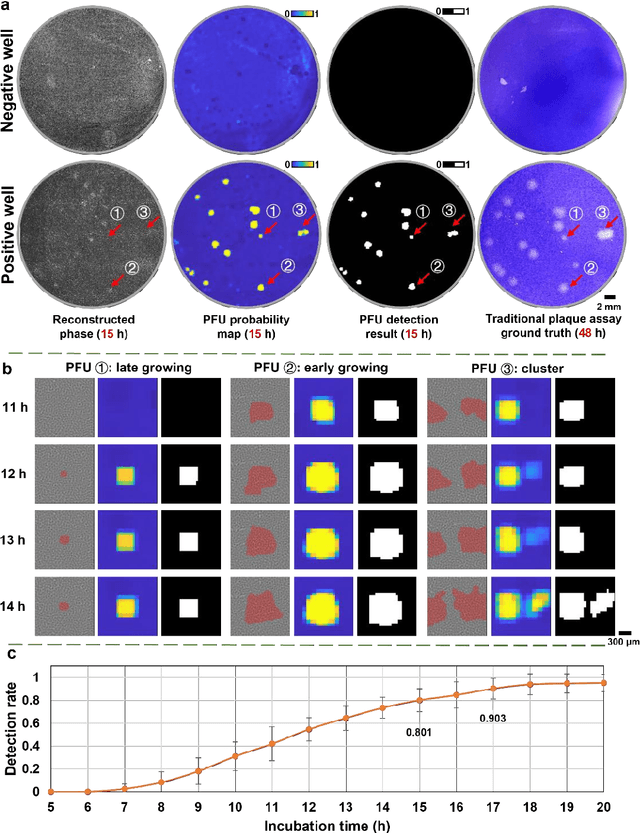

Plaque assay is the gold standard method for quantifying the concentration of replication-competent lytic virions. Expediting and automating viral plaque assays will significantly benefit clinical diagnosis, vaccine development, and the production of recombinant proteins or antiviral agents. Here, we present a rapid and stain-free quantitative viral plaque assay using lensfree holographic imaging and deep learning. This cost-effective, compact, and automated device significantly reduces the incubation time needed for traditional plaque assays while preserving their advantages over other virus quantification methods. This device captures ~0.32 Giga-pixel/hour phase information of the objects per test well, covering an area of ~30x30 mm^2, in a label-free manner, eliminating staining entirely. We demonstrated the success of this computational method using Vero E6 cells and vesicular stomatitis virus. Using a neural network, this stain-free device automatically detected the first cell lysing events due to the viral replication as early as 5 hours after the incubation, and achieved >90% detection rate for the plaque-forming units (PFUs) with 100% specificity in <20 hours, providing major time savings compared to the traditional plaque assays that take ~48 hours or more. This data-driven plaque assay also offers the capability of quantifying the infected area of the cell monolayer, performing automated counting and quantification of PFUs and virus-infected areas over a 10-fold larger dynamic range of virus concentration than standard viral plaque assays. This compact, low-cost, automated PFU quantification device can be broadly used in virology research, vaccine development, and clinical applications
Towards Ground Truth for Single Image Deraining
Jun 22, 2022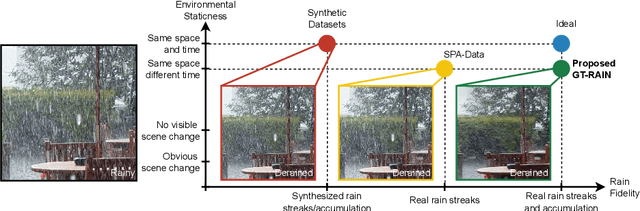
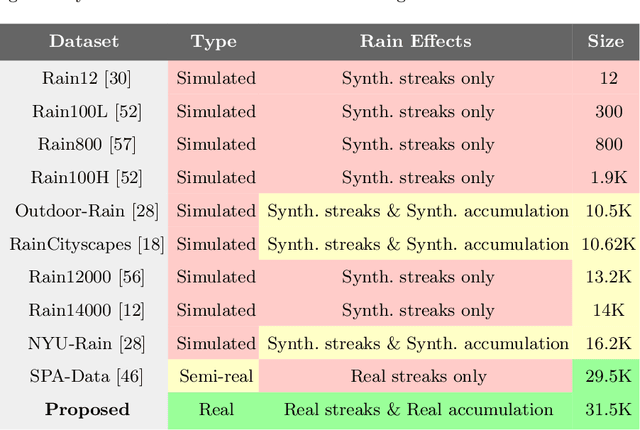
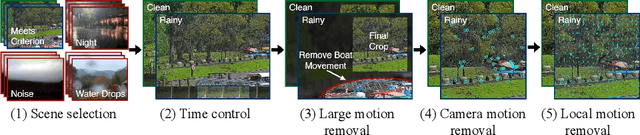
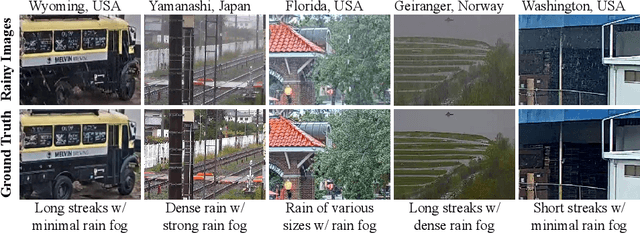
We propose a large-scale dataset of real-world rainy and clean image pairs and a method to remove degradations, induced by rain streaks and rain accumulation, from the image. As there exists no real-world dataset for deraining, current state-of-the-art methods rely on synthetic data and thus are limited by the sim2real domain gap; moreover, rigorous evaluation remains a challenge due to the absence of a real paired dataset. We fill this gap by collecting the first real paired deraining dataset through meticulous control of non-rain variations. Our dataset enables paired training and quantitative evaluation for diverse real-world rain phenomena (e.g. rain streaks and rain accumulation). To learn a representation invariant to rain phenomena, we propose a deep neural network that reconstructs the underlying scene by minimizing a rain-invariant loss between rainy and clean images. Extensive experiments demonstrate that the proposed dataset benefits existing derainers, and our model can outperform the state-of-the-art deraining methods on real rainy images under various conditions.
SLAM-Supported Self-Training for 6D Object Pose Estimation
Mar 29, 2022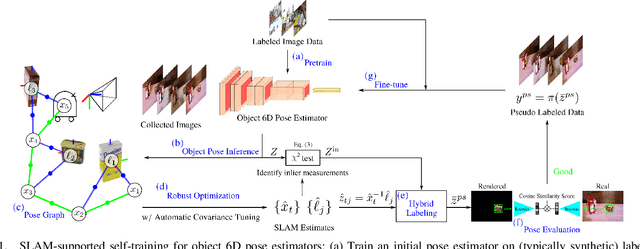
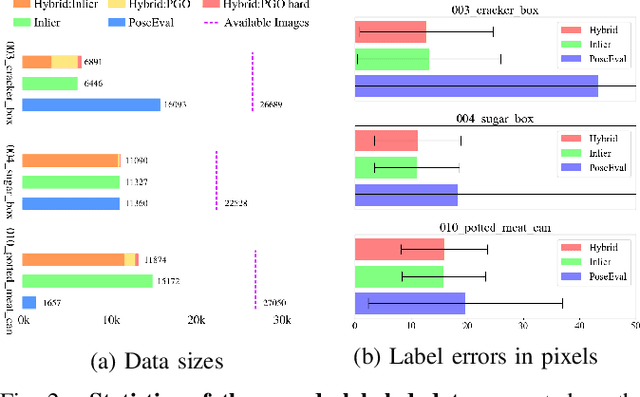
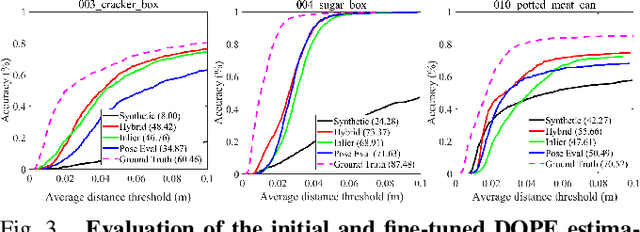

Recent progress in learning-based object pose estimation paves the way for developing richer object-level world representations. However, the estimators, often trained with out-of-domain data, can suffer performance degradation as deployed in novel environments. To address the problem, we present a SLAM-supported self-training procedure to autonomously improve robot object pose estimation ability during navigation. Combining the network predictions with robot odometry, we can build a consistent object-level environment map via pose graph optimization (PGO). Exploiting the state estimates from PGO, we pseudo-label robot-collected RGB images to fine-tune the pose estimators. Unfortunately, it is difficult to quantify the uncertainty of the estimator predictions. The unmodeled data uncertainty used for PGO can result in low-quality object pose estimates. An automatic covariance tuning method is developed for robust PGO by allowing the measurement uncertainty models to change as part of the optimization process. The formulation permits a straightforward alternating minimization procedure that re-scales covariances analytically and component-wise, enabling more flexible noise modeling for learning-based measurements. We test our method with the deep object pose estimator (DOPE) on the YCB video dataset and in real-world robot experiments. The method can achieve significant performance gain in pose estimation, and in return facilitates the success of object SLAM.