 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSLAM-Supported Self-Training for 6D Object Pose Estimation
Paper and Code
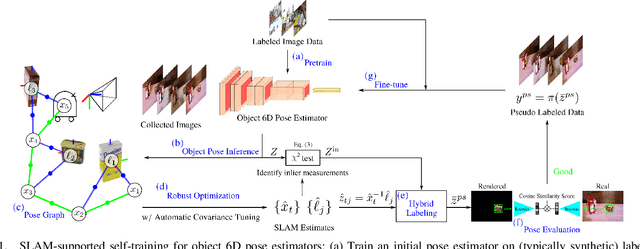

Recent progress in learning-based object pose estimation paves the way for developing richer object-level world representations. However, the estimators, often trained with out-of-domain data, can suffer performance degradation as deployed in novel environments. To address the problem, we present a SLAM-supported self-training procedure to autonomously improve robot object pose estimation ability during navigation. Combining the network predictions with robot odometry, we can build a consistent object-level environment map via pose graph optimization (PGO). Exploiting the state estimates from PGO, we pseudo-label robot-collected RGB images to fine-tune the pose estimators. Unfortunately, it is difficult to quantify the uncertainty of the estimator predictions. The unmodeled data uncertainty used for PGO can result in low-quality object pose estimates. An automatic covariance tuning method is developed for robust PGO by allowing the measurement uncertainty models to change as part of the optimization process. The formulation permits a straightforward alternating minimization procedure that re-scales covariances analytically and component-wise, enabling more flexible noise modeling for learning-based measurements. We test our method with the deep object pose estimator (DOPE) on the YCB video dataset and in real-world robot experiments. The method can achieve significant performance gain in pose estimation, and in return facilitates the success of object SLAM.