 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAll-day Depth Completion
May 27, 2024



We propose a method for depth estimation under different illumination conditions, i.e., day and night time. As photometry is uninformative in regions under low-illumination, we tackle the problem through a multi-sensor fusion approach, where we take as input an additional synchronized sparse point cloud (i.e., from a LiDAR) projected onto the image plane as a sparse depth map, along with a camera image. The crux of our method lies in the use of the abundantly available synthetic data to first approximate the 3D scene structure by learning a mapping from sparse to (coarse) dense depth maps along with their predictive uncertainty - we term this, SpaDe. In poorly illuminated regions where photometric intensities do not afford the inference of local shape, the coarse approximation of scene depth serves as a prior; the uncertainty map is then used with the image to guide refinement through an uncertainty-driven residual learning (URL) scheme. The resulting depth completion network leverages complementary strengths from both modalities - depth is sparse but insensitive to illumination and in metric scale, and image is dense but sensitive with scale ambiguity. SpaDe can be used in a plug-and-play fashion, which allows for 25% improvement when augmented onto existing methods to preprocess sparse depth. We demonstrate URL on the nuScenes dataset where we improve over all baselines by an average 11.65% in all-day scenarios, 11.23% when tested specifically for daytime, and 13.12% for nighttime scenes.
Towards Ground Truth for Single Image Deraining
Jun 22, 2022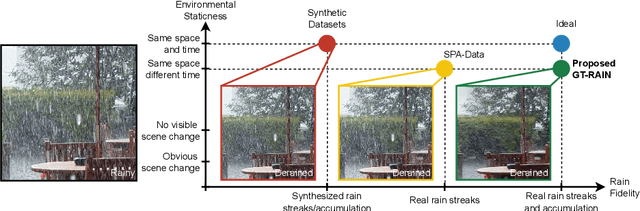
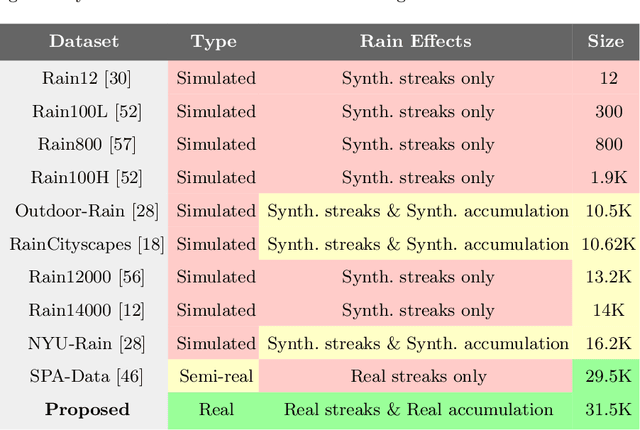
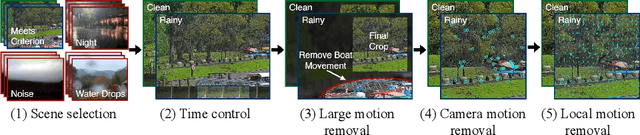
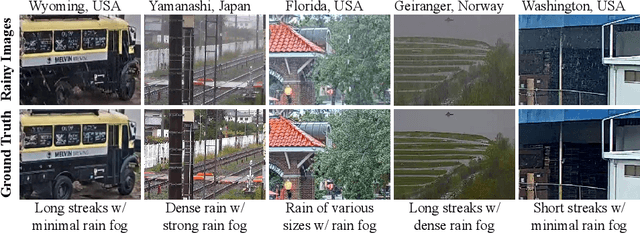
We propose a large-scale dataset of real-world rainy and clean image pairs and a method to remove degradations, induced by rain streaks and rain accumulation, from the image. As there exists no real-world dataset for deraining, current state-of-the-art methods rely on synthetic data and thus are limited by the sim2real domain gap; moreover, rigorous evaluation remains a challenge due to the absence of a real paired dataset. We fill this gap by collecting the first real paired deraining dataset through meticulous control of non-rain variations. Our dataset enables paired training and quantitative evaluation for diverse real-world rain phenomena (e.g. rain streaks and rain accumulation). To learn a representation invariant to rain phenomena, we propose a deep neural network that reconstructs the underlying scene by minimizing a rain-invariant loss between rainy and clean images. Extensive experiments demonstrate that the proposed dataset benefits existing derainers, and our model can outperform the state-of-the-art deraining methods on real rainy images under various conditions.