 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMuJoCo Playground
Feb 12, 2025We introduce MuJoCo Playground, a fully open-source framework for robot learning built with MJX, with the express goal of streamlining simulation, training, and sim-to-real transfer onto robots. With a simple "pip install playground", researchers can train policies in minutes on a single GPU. Playground supports diverse robotic platforms, including quadrupeds, humanoids, dexterous hands, and robotic arms, enabling zero-shot sim-to-real transfer from both state and pixel inputs. This is achieved through an integrated stack comprising a physics engine, batch renderer, and training environments. Along with video results, the entire framework is freely available at playground.mujoco.org
Learned Neural Physics Simulation for Articulated 3D Human Pose Reconstruction
Oct 15, 2024We propose a novel neural network approach, LARP (Learned Articulated Rigid body Physics), to model the dynamics of articulated human motion with contact. Our goal is to develop a faster and more convenient methodological alternative to traditional physics simulators for use in computer vision tasks such as human motion reconstruction from video. To that end we introduce a training procedure and model components that support the construction of a recurrent neural architecture to accurately simulate articulated rigid body dynamics. Our neural architecture supports features typically found in traditional physics simulators, such as modeling of joint motors, variable dimensions of body parts, contact between body parts and objects, and is an order of magnitude faster than traditional systems when multiple simulations are run in parallel. To demonstrate the value of LARP we use it as a drop-in replacement for a state of the art classical non-differentiable simulator in an existing video-based reconstruction framework and show comparative or better 3D human pose reconstruction accuracy.
Learning to Learn Faster from Human Feedback with Language Model Predictive Control
Feb 18, 2024



Large language models (LLMs) have been shown to exhibit a wide range of capabilities, such as writing robot code from language commands -- enabling non-experts to direct robot behaviors, modify them based on feedback, or compose them to perform new tasks. However, these capabilities (driven by in-context learning) are limited to short-term interactions, where users' feedback remains relevant for only as long as it fits within the context size of the LLM, and can be forgotten over longer interactions. In this work, we investigate fine-tuning the robot code-writing LLMs, to remember their in-context interactions and improve their teachability i.e., how efficiently they adapt to human inputs (measured by average number of corrections before the user considers the task successful). Our key observation is that when human-robot interactions are formulated as a partially observable Markov decision process (in which human language inputs are observations, and robot code outputs are actions), then training an LLM to complete previous interactions can be viewed as training a transition dynamics model -- that can be combined with classic robotics techniques such as model predictive control (MPC) to discover shorter paths to success. This gives rise to Language Model Predictive Control (LMPC), a framework that fine-tunes PaLM 2 to improve its teachability on 78 tasks across 5 robot embodiments -- improving non-expert teaching success rates of unseen tasks by 26.9% while reducing the average number of human corrections from 2.4 to 1.9. Experiments show that LMPC also produces strong meta-learners, improving the success rate of in-context learning new tasks on unseen robot embodiments and APIs by 31.5%. See videos, code, and demos at: https://robot-teaching.github.io/.
Barkour: Benchmarking Animal-level Agility with Quadruped Robots
May 24, 2023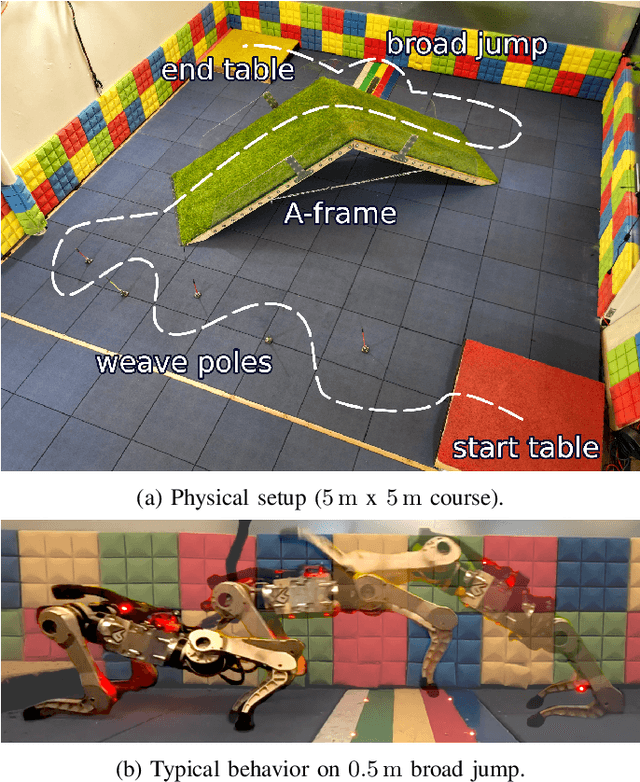
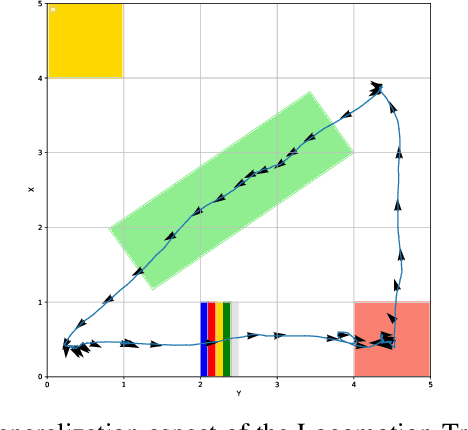
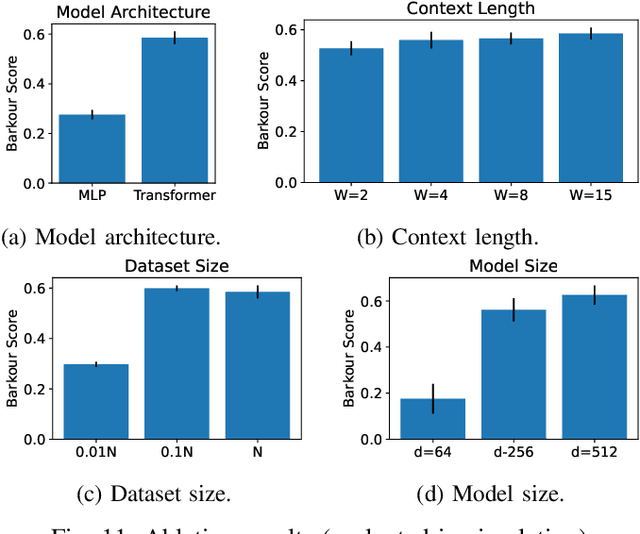
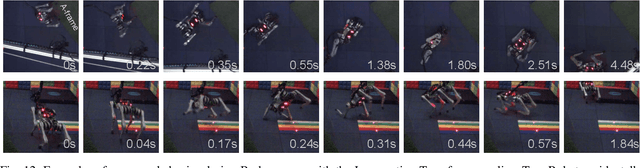
Animals have evolved various agile locomotion strategies, such as sprinting, leaping, and jumping. There is a growing interest in developing legged robots that move like their biological counterparts and show various agile skills to navigate complex environments quickly. Despite the interest, the field lacks systematic benchmarks to measure the performance of control policies and hardware in agility. We introduce the Barkour benchmark, an obstacle course to quantify agility for legged robots. Inspired by dog agility competitions, it consists of diverse obstacles and a time based scoring mechanism. This encourages researchers to develop controllers that not only move fast, but do so in a controllable and versatile way. To set strong baselines, we present two methods for tackling the benchmark. In the first approach, we train specialist locomotion skills using on-policy reinforcement learning methods and combine them with a high-level navigation controller. In the second approach, we distill the specialist skills into a Transformer-based generalist locomotion policy, named Locomotion-Transformer, that can handle various terrains and adjust the robot's gait based on the perceived environment and robot states. Using a custom-built quadruped robot, we demonstrate that our method can complete the course at half the speed of a dog. We hope that our work represents a step towards creating controllers that enable robots to reach animal-level agility.
Get Back Here: Robust Imitation by Return-to-Distribution Planning
May 02, 2023We consider the Imitation Learning (IL) setup where expert data are not collected on the actual deployment environment but on a different version. To address the resulting distribution shift, we combine behavior cloning (BC) with a planner that is tasked to bring the agent back to states visited by the expert whenever the agent deviates from the demonstration distribution. The resulting algorithm, POIR, can be trained offline, and leverages online interactions to efficiently fine-tune its planner to improve performance over time. We test POIR on a variety of human-generated manipulation demonstrations in a realistic robotic manipulation simulator and show robustness of the learned policy to different initial state distributions and noisy dynamics.