 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRolling Ahead Diffusion for Traffic Scene Simulation
Feb 13, 2025



Realistic driving simulation requires that NPCs not only mimic natural driving behaviors but also react to the behavior of other simulated agents. Recent developments in diffusion-based scenario generation focus on creating diverse and realistic traffic scenarios by jointly modelling the motion of all the agents in the scene. However, these traffic scenarios do not react when the motion of agents deviates from their modelled trajectories. For example, the ego-agent can be controlled by a stand along motion planner. To produce reactive scenarios with joint scenario models, the model must regenerate the scenario at each timestep based on new observations in a Model Predictive Control (MPC) fashion. Although reactive, this method is time-consuming, as one complete possible future for all NPCs is generated per simulation step. Alternatively, one can utilize an autoregressive model (AR) to predict only the immediate next-step future for all NPCs. Although faster, this method lacks the capability for advanced planning. We present a rolling diffusion based traffic scene generation model which mixes the benefits of both methods by predicting the next step future and simultaneously predicting partially noised further future steps at the same time. We show that such model is efficient compared to diffusion model based AR, achieving a beneficial compromise between reactivity and computational efficiency.
Semantically Consistent Video Inpainting with Conditional Diffusion Models
Apr 30, 2024Current state-of-the-art methods for video inpainting typically rely on optical flow or attention-based approaches to inpaint masked regions by propagating visual information across frames. While such approaches have led to significant progress on standard benchmarks, they struggle with tasks that require the synthesis of novel content that is not present in other frames. In this paper we reframe video inpainting as a conditional generative modeling problem and present a framework for solving such problems with conditional video diffusion models. We highlight the advantages of using a generative approach for this task, showing that our method is capable of generating diverse, high-quality inpaintings and synthesizing new content that is spatially, temporally, and semantically consistent with the provided context.
A Diffusion-Model of Joint Interactive Navigation
Sep 21, 2023



Simulation of autonomous vehicle systems requires that simulated traffic participants exhibit diverse and realistic behaviors. The use of prerecorded real-world traffic scenarios in simulation ensures realism but the rarity of safety critical events makes large scale collection of driving scenarios expensive. In this paper, we present DJINN - a diffusion based method of generating traffic scenarios. Our approach jointly diffuses the trajectories of all agents, conditioned on a flexible set of state observations from the past, present, or future. On popular trajectory forecasting datasets, we report state of the art performance on joint trajectory metrics. In addition, we demonstrate how DJINN flexibly enables direct test-time sampling from a variety of valuable conditional distributions including goal-based sampling, behavior-class sampling, and scenario editing.
Realistically distributing object placements in synthetic training data improves the performance of vision-based object detection models
May 24, 2023When training object detection models on synthetic data, it is important to make the distribution of synthetic data as close as possible to the distribution of real data. We investigate specifically the impact of object placement distribution, keeping all other aspects of synthetic data fixed. Our experiment, training a 3D vehicle detection model in CARLA and testing on KITTI, demonstrates a substantial improvement resulting from improving the object placement distribution.
NeurIPS 2022 Competition: Driving SMARTS
Nov 14, 2022

Driving SMARTS is a regular competition designed to tackle problems caused by the distribution shift in dynamic interaction contexts that are prevalent in real-world autonomous driving (AD). The proposed competition supports methodologically diverse solutions, such as reinforcement learning (RL) and offline learning methods, trained on a combination of naturalistic AD data and open-source simulation platform SMARTS. The two-track structure allows focusing on different aspects of the distribution shift. Track 1 is open to any method and will give ML researchers with different backgrounds an opportunity to solve a real-world autonomous driving challenge. Track 2 is designed for strictly offline learning methods. Therefore, direct comparisons can be made between different methods with the aim to identify new promising research directions. The proposed setup consists of 1) realistic traffic generated using real-world data and micro simulators to ensure fidelity of the scenarios, 2) framework accommodating diverse methods for solving the problem, and 3) baseline method. As such it provides a unique opportunity for the principled investigation into various aspects of autonomous vehicle deployment.
Vehicle Type Specific Waypoint Generation
Aug 09, 2022
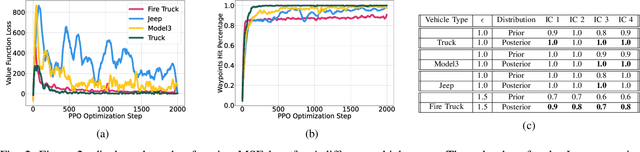
We develop a generic mechanism for generating vehicle-type specific sequences of waypoints from a probabilistic foundation model of driving behavior. Many foundation behavior models are trained on data that does not include vehicle information, which limits their utility in downstream applications such as planning. Our novel methodology conditionally specializes such a behavior predictive model to a vehicle-type by utilizing byproducts of the reinforcement learning algorithms used to produce vehicle specific controllers. We show how to compose a vehicle specific value function estimate with a generic probabilistic behavior model to generate vehicle-type specific waypoint sequences that are more likely to be physically plausible then their vehicle-agnostic counterparts.
Critic Sequential Monte Carlo
May 30, 2022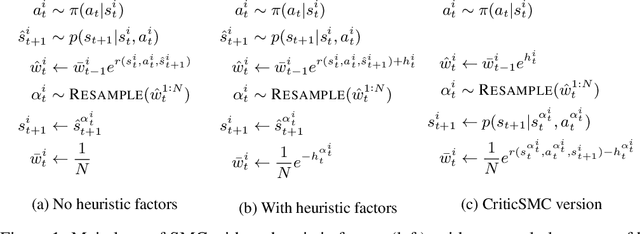
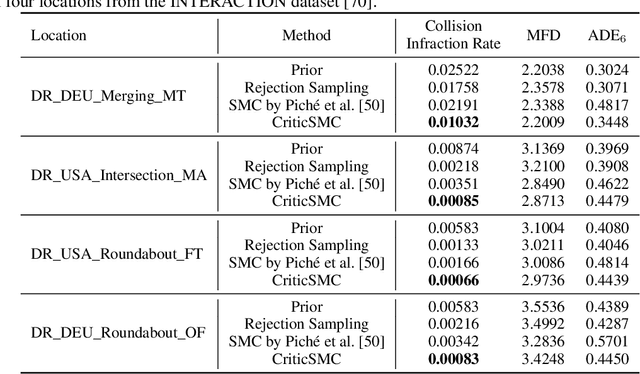
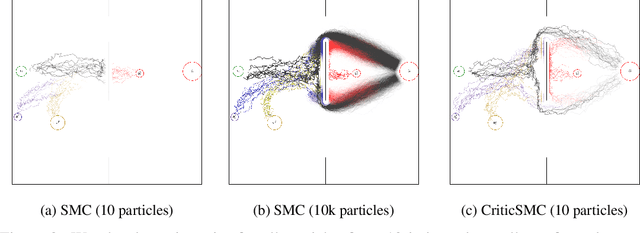
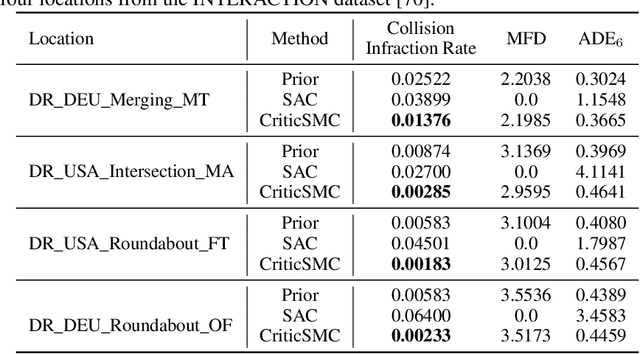
We introduce CriticSMC, a new algorithm for planning as inference built from a novel composition of sequential Monte Carlo with learned soft-Q function heuristic factors. This algorithm is structured so as to allow using large numbers of putative particles leading to efficient utilization of computational resource and effective discovery of high reward trajectories even in environments with difficult reward surfaces such as those arising from hard constraints. Relative to prior art our approach is notably still compatible with model-free reinforcement learning in the sense that the implicit policy we produce can be used at test time in the absence of a world model. Our experiments on self-driving car collision avoidance in simulation demonstrate improvements against baselines in terms of infraction minimization relative to computational effort while maintaining diversity and realism of found trajectories.
Imagining The Road Ahead: Multi-Agent Trajectory Prediction via Differentiable Simulation
Apr 22, 2021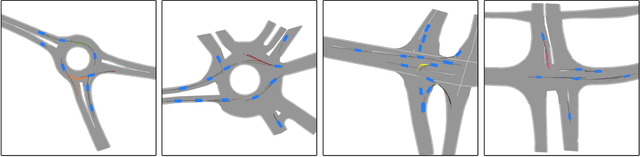
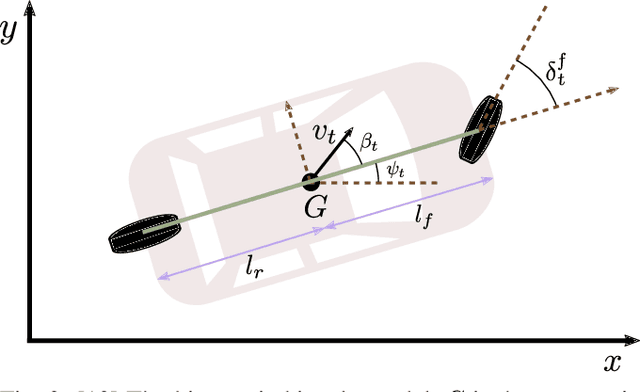
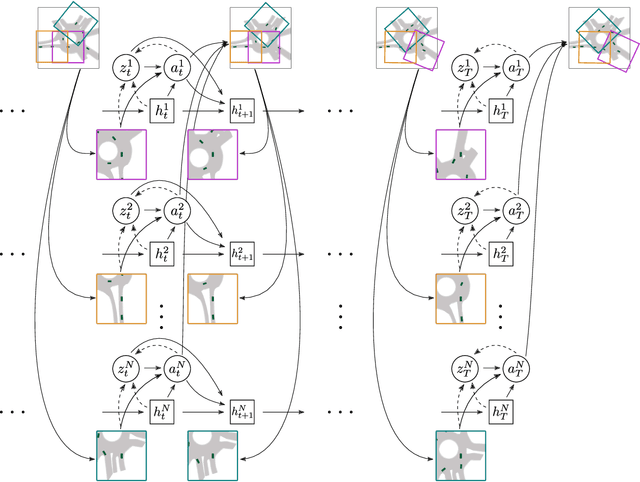
We develop a deep generative model built on a fully differentiable simulator for multi-agent trajectory prediction. Agents are modeled with conditional recurrent variational neural networks (CVRNNs), which take as input an ego-centric birdview image representing the current state of the world and output an action, consisting of steering and acceleration, which is used to derive the subsequent agent state using a kinematic bicycle model. The full simulation state is then differentiably rendered for each agent, initiating the next time step. We achieve state-of-the-art results on the INTERACTION dataset, using standard neural architectures and a standard variational training objective, producing realistic multi-modal predictions without any ad-hoc diversity-inducing losses. We conduct ablation studies to examine individual components of the simulator, finding that both the kinematic bicycle model and the continuous feedback from the birdview image are crucial for achieving this level of performance. We name our model ITRA, for "Imagining the Road Ahead".
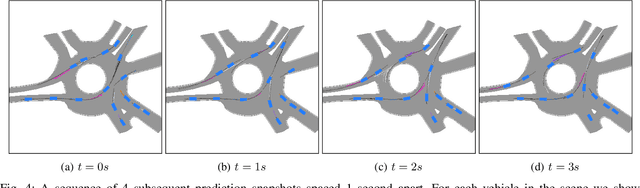
Robust Asymmetric Learning in POMDPs
Dec 31, 2020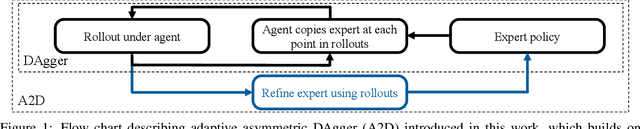

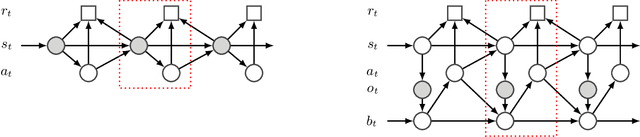
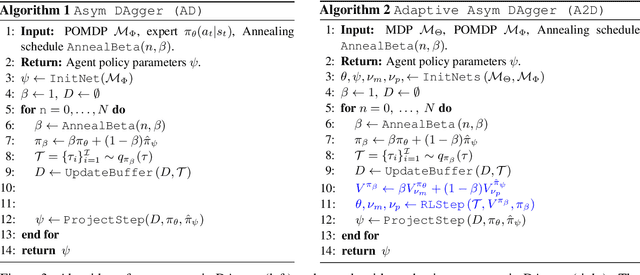
Policies for partially observed Markov decision processes can be efficiently learned by imitating policies for the corresponding fully observed Markov decision processes. Unfortunately, existing approaches for this kind of imitation learning have a serious flaw: the expert does not know what the trainee cannot see, and so may encourage actions that are sub-optimal, even unsafe, under partial information. We derive an objective to instead train the expert to maximize the expected reward of the imitating agent policy, and use it to construct an efficient algorithm, adaptive asymmetric DAgger (A2D), that jointly trains the expert and the agent. We show that A2D produces an expert policy that the agent can safely imitate, in turn outperforming policies learned by imitating a fixed expert.
Semi-supervised Sequential Generative Models
Jun 30, 2020

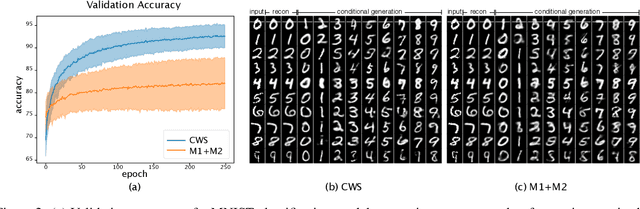
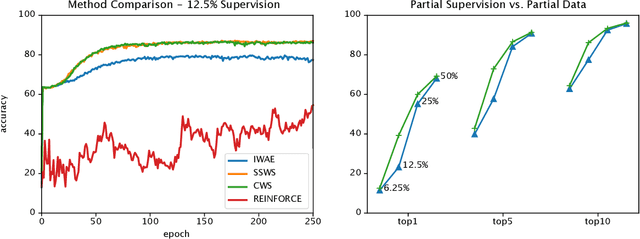
We introduce a novel objective for training deep generative time-series models with discrete latent variables for which supervision is only sparsely available. This instance of semi-supervised learning is challenging for existing methods, because the exponential number of possible discrete latent configurations results in high variance gradient estimators. We first overcome this problem by extending the standard semi-supervised generative modeling objective with reweighted wake-sleep. However, we find that this approach still suffers when the frequency of available labels varies between training sequences. Finally, we introduce a unified objective inspired by teacher-forcing and show that this approach is robust to variable length supervision. We call the resulting method caffeinated wake-sleep (CWS) to emphasize its additional dependence on real data. We demonstrate its effectiveness with experiments on MNIST, handwriting, and fruit fly trajectory data.