 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApplication and Validation of Geospatial Foundation Model Data for the Prediction of Health Facility Programmatic Outputs -- A Case Study in Malawi
Oct 29, 2025



The reliability of routine health data in low and middle-income countries (LMICs) is often constrained by reporting delays and incomplete coverage, necessitating the exploration of novel data sources and analytics. Geospatial Foundation Models (GeoFMs) offer a promising avenue by synthesizing diverse spatial, temporal, and behavioral data into mathematical embeddings that can be efficiently used for downstream prediction tasks. This study evaluated the predictive performance of three GeoFM embedding sources - Google Population Dynamics Foundation Model (PDFM), Google AlphaEarth (derived from satellite imagery), and mobile phone call detail records (CDR) - for modeling 15 routine health programmatic outputs in Malawi, and compared their utility to traditional geospatial interpolation methods. We used XGBoost models on data from 552 health catchment areas (January 2021-May 2023), assessing performance with R2, and using an 80/20 training and test data split with 5-fold cross-validation used in training. While predictive performance was mixed, the embedding-based approaches improved upon baseline geostatistical methods in 13 of 15 (87%) indicators tested. A Multi-GeoFM model integrating all three embedding sources produced the most robust predictions, achieving average 5-fold cross validated R2 values for indicators like population density (0.63), new HIV cases (0.57), and child vaccinations (0.47) and test set R2 of 0.64, 0.68, and 0.55, respectively. Prediction was poor for prediction targets with low primary data availability, such as TB and malnutrition cases. These results demonstrate that GeoFM embeddings imbue a modest predictive improvement for select health and demographic outcomes in an LMIC context. We conclude that the integration of multiple GeoFM sources is an efficient and valuable tool for supplementing and strengthening constrained routine health information systems.
A Multi-Agent Reinforcement Learning Testbed for Cognitive Radio Applications
Oct 28, 2024Technological trends show that Radio Frequency Reinforcement Learning (RFRL) will play a prominent role in the wireless communication systems of the future. Applications of RFRL range from military communications jamming to enhancing WiFi networks. Before deploying algorithms for these purposes, they must be trained in a simulation environment to ensure adequate performance. For this reason, we previously created the RFRL Gym: a standardized, accessible tool for the development and testing of reinforcement learning (RL) algorithms in the wireless communications space. This environment leveraged the OpenAI Gym framework and featured customizable simulation scenarios within the RF spectrum. However, the RFRL Gym was limited to training a single RL agent per simulation; this is not ideal, as most real-world RF scenarios will contain multiple intelligent agents in cooperative, competitive, or mixed settings, which is a natural consequence of spectrum congestion. Therefore, through integration with Ray RLlib, multi-agent reinforcement learning (MARL) functionality for training and assessment has been added to the RFRL Gym, making it even more of a robust tool for RF spectrum simulation. This paper provides an overview of the updated RFRL Gym environment. In this work, the general framework of the tool is described relative to comparable existing resources, highlighting the significant additions and refactoring we have applied to the Gym. Afterward, results from testing various RF scenarios in the MARL environment and future additions are discussed.
Online Continual Learning of Video Diffusion Models From a Single Video Stream
Jun 07, 2024Diffusion models have shown exceptional capabilities in generating realistic videos. Yet, their training has been predominantly confined to offline environments where models can repeatedly train on i.i.d. data to convergence. This work explores the feasibility of training diffusion models from a semantically continuous video stream, where correlated video frames sequentially arrive one at a time. To investigate this, we introduce two novel continual video generative modeling benchmarks, Lifelong Bouncing Balls and Windows 95 Maze Screensaver, each containing over a million video frames generated from navigating stationary environments. Surprisingly, our experiments show that diffusion models can be effectively trained online using experience replay, achieving performance comparable to models trained with i.i.d. samples given the same number of gradient steps.
TorchDriveEnv: A Reinforcement Learning Benchmark for Autonomous Driving with Reactive, Realistic, and Diverse Non-Playable Characters
May 07, 2024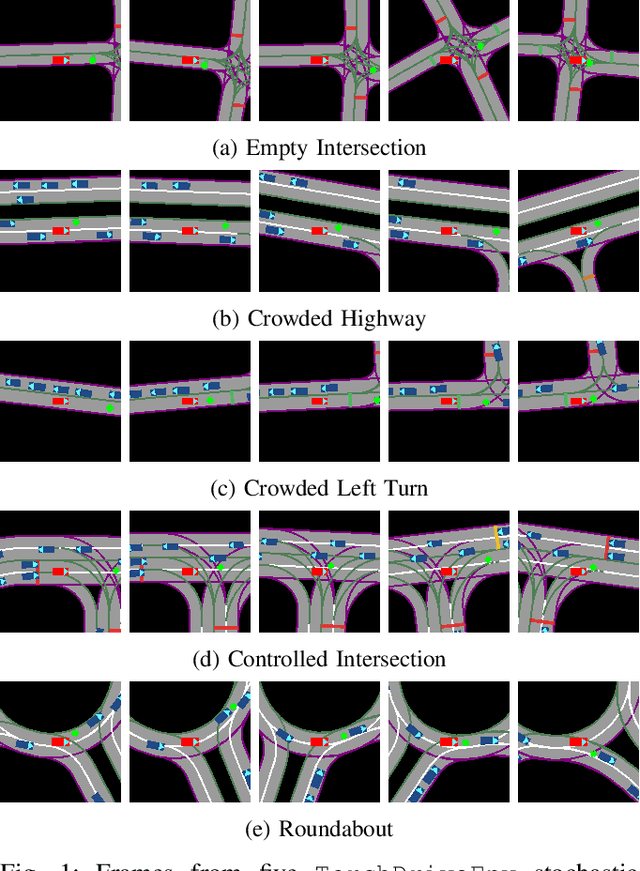
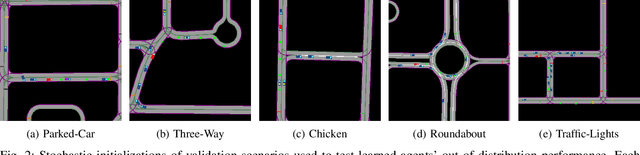
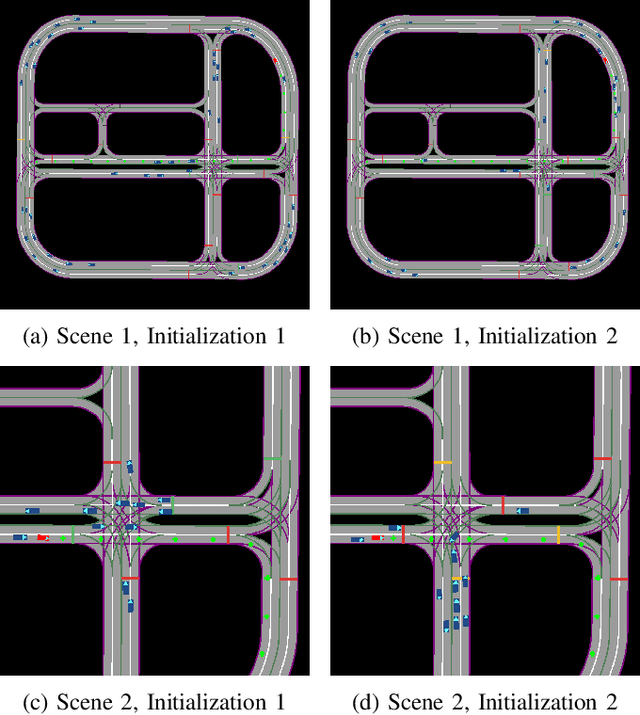
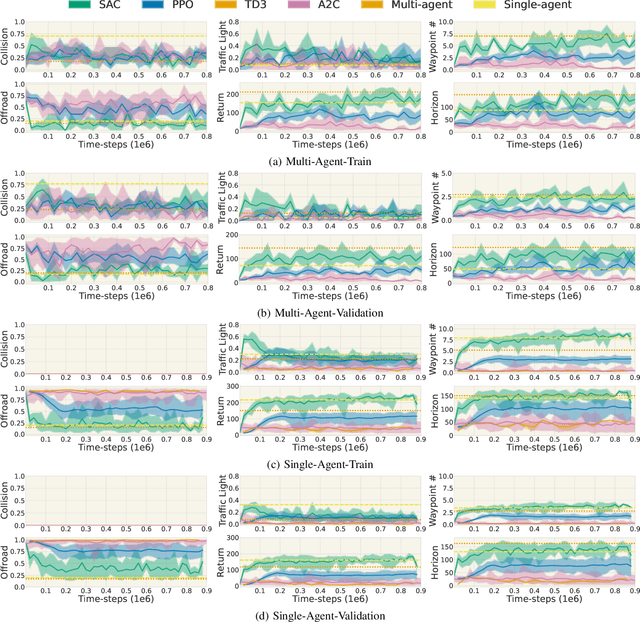
The training, testing, and deployment, of autonomous vehicles requires realistic and efficient simulators. Moreover, because of the high variability between different problems presented in different autonomous systems, these simulators need to be easy to use, and easy to modify. To address these problems we introduce TorchDriveSim and its benchmark extension TorchDriveEnv. TorchDriveEnv is a lightweight reinforcement learning benchmark programmed entirely in Python, which can be modified to test a number of different factors in learned vehicle behavior, including the effect of varying kinematic models, agent types, and traffic control patterns. Most importantly unlike many replay based simulation approaches, TorchDriveEnv is fully integrated with a state of the art behavioral simulation API. This allows users to train and evaluate driving models alongside data driven Non-Playable Characters (NPC) whose initializations and driving behavior are reactive, realistic, and diverse. We illustrate the efficiency and simplicity of TorchDriveEnv by evaluating common reinforcement learning baselines in both training and validation environments. Our experiments show that TorchDriveEnv is easy to use, but difficult to solve.
Semantically Consistent Video Inpainting with Conditional Diffusion Models
Apr 30, 2024Current state-of-the-art methods for video inpainting typically rely on optical flow or attention-based approaches to inpaint masked regions by propagating visual information across frames. While such approaches have led to significant progress on standard benchmarks, they struggle with tasks that require the synthesis of novel content that is not present in other frames. In this paper we reframe video inpainting as a conditional generative modeling problem and present a framework for solving such problems with conditional video diffusion models. We highlight the advantages of using a generative approach for this task, showing that our method is capable of generating diverse, high-quality inpaintings and synthesizing new content that is spatially, temporally, and semantically consistent with the provided context.
Nearest Neighbour Score Estimators for Diffusion Generative Models
Feb 12, 2024



Score function estimation is the cornerstone of both training and sampling from diffusion generative models. Despite this fact, the most commonly used estimators are either biased neural network approximations or high variance Monte Carlo estimators based on the conditional score. We introduce a novel nearest neighbour score function estimator which utilizes multiple samples from the training set to dramatically decrease estimator variance. We leverage our low variance estimator in two compelling applications. Training consistency models with our estimator, we report a significant increase in both convergence speed and sample quality. In diffusion models, we show that our estimator can replace a learned network for probability-flow ODE integration, opening promising new avenues of future research.
Algorithms for Non-Negative Matrix Factorization on Noisy Data With Negative Values
Nov 08, 2023Non-negative matrix factorization (NMF) is a dimensionality reduction technique that has shown promise for analyzing noisy data, especially astronomical data. For these datasets, the observed data may contain negative values due to noise even when the true underlying physical signal is strictly positive. Prior NMF work has not treated negative data in a statistically consistent manner, which becomes problematic for low signal-to-noise data with many negative values. In this paper we present two algorithms, Shift-NMF and Nearly-NMF, that can handle both the noisiness of the input data and also any introduced negativity. Both of these algorithms use the negative data space without clipping, and correctly recover non-negative signals without any introduced positive offset that occurs when clipping negative data. We demonstrate this numerically on both simple and more realistic examples, and prove that both algorithms have monotonically decreasing update rules.
A Diffusion-Model of Joint Interactive Navigation
Sep 21, 2023



Simulation of autonomous vehicle systems requires that simulated traffic participants exhibit diverse and realistic behaviors. The use of prerecorded real-world traffic scenarios in simulation ensures realism but the rarity of safety critical events makes large scale collection of driving scenarios expensive. In this paper, we present DJINN - a diffusion based method of generating traffic scenarios. Our approach jointly diffuses the trajectories of all agents, conditioned on a flexible set of state observations from the past, present, or future. On popular trajectory forecasting datasets, we report state of the art performance on joint trajectory metrics. In addition, we demonstrate how DJINN flexibly enables direct test-time sampling from a variety of valuable conditional distributions including goal-based sampling, behavior-class sampling, and scenario editing.
Realistically distributing object placements in synthetic training data improves the performance of vision-based object detection models
May 24, 2023When training object detection models on synthetic data, it is important to make the distribution of synthetic data as close as possible to the distribution of real data. We investigate specifically the impact of object placement distribution, keeping all other aspects of synthetic data fixed. Our experiment, training a 3D vehicle detection model in CARLA and testing on KITTI, demonstrates a substantial improvement resulting from improving the object placement distribution.
Video Killed the HD-Map: Predicting Driving Behavior Directly From Drone Images
May 19, 2023The development of algorithms that learn behavioral driving models using human demonstrations has led to increasingly realistic simulations. In general, such models learn to jointly predict trajectories for all controlled agents by exploiting road context information such as drivable lanes obtained from manually annotated high-definition (HD) maps. Recent studies show that these models can greatly benefit from increasing the amount of human data available for training. However, the manual annotation of HD maps which is necessary for every new location puts a bottleneck on efficiently scaling up human traffic datasets. We propose a drone birdview image-based map (DBM) representation that requires minimal annotation and provides rich road context information. We evaluate multi-agent trajectory prediction using the DBM by incorporating it into a differentiable driving simulator as an image-texture-based differentiable rendering module. Our results demonstrate competitive multi-agent trajectory prediction performance when using our DBM representation as compared to models trained with rasterized HD maps.