 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGetting SMARTER for Motion Planning in Autonomous Driving Systems
Feb 20, 2025



Motion planning is a fundamental problem in autonomous driving and perhaps the most challenging to comprehensively evaluate because of the associated risks and expenses of real-world deployment. Therefore, simulations play an important role in efficient development of planning algorithms. To be effective, simulations must be accurate and realistic, both in terms of dynamics and behavior modeling, and also highly customizable in order to accommodate a broad spectrum of research frameworks. In this paper, we introduce SMARTS 2.0, the second generation of our motion planning simulator which, in addition to being highly optimized for large-scale simulation, provides many new features, such as realistic map integration, vehicle-to-vehicle (V2V) communication, traffic and pedestrian simulation, and a broad variety of sensor models. Moreover, we present a novel benchmark suite for evaluating planning algorithms in various highly challenging scenarios, including interactive driving, such as turning at intersections, and adaptive driving, in which the task is to closely follow a lead vehicle without any explicit knowledge of its intention. Each scenario is characterized by a variety of traffic patterns and road structures. We further propose a series of common and task-specific metrics to effectively evaluate the performance of the planning algorithms. At the end, we evaluate common motion planning algorithms using the proposed benchmark and highlight the challenges the proposed scenarios impose. The new SMARTS 2.0 features and the benchmark are publicly available at github.com/huawei-noah/SMARTS.
NeurIPS 2022 Competition: Driving SMARTS
Nov 14, 2022

Driving SMARTS is a regular competition designed to tackle problems caused by the distribution shift in dynamic interaction contexts that are prevalent in real-world autonomous driving (AD). The proposed competition supports methodologically diverse solutions, such as reinforcement learning (RL) and offline learning methods, trained on a combination of naturalistic AD data and open-source simulation platform SMARTS. The two-track structure allows focusing on different aspects of the distribution shift. Track 1 is open to any method and will give ML researchers with different backgrounds an opportunity to solve a real-world autonomous driving challenge. Track 2 is designed for strictly offline learning methods. Therefore, direct comparisons can be made between different methods with the aim to identify new promising research directions. The proposed setup consists of 1) realistic traffic generated using real-world data and micro simulators to ensure fidelity of the scenarios, 2) framework accommodating diverse methods for solving the problem, and 3) baseline method. As such it provides a unique opportunity for the principled investigation into various aspects of autonomous vehicle deployment.
SMARTS: Scalable Multi-Agent Reinforcement Learning Training School for Autonomous Driving
Nov 01, 2020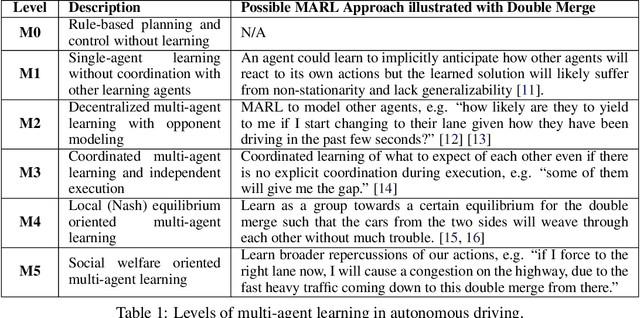
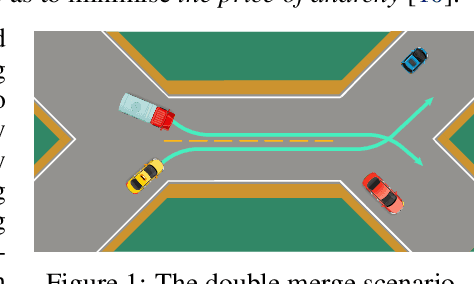
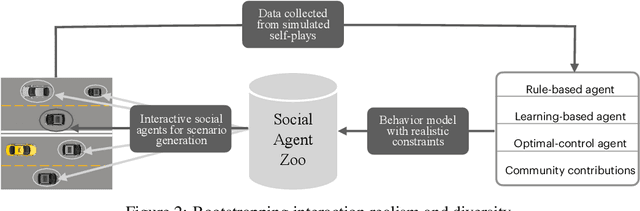
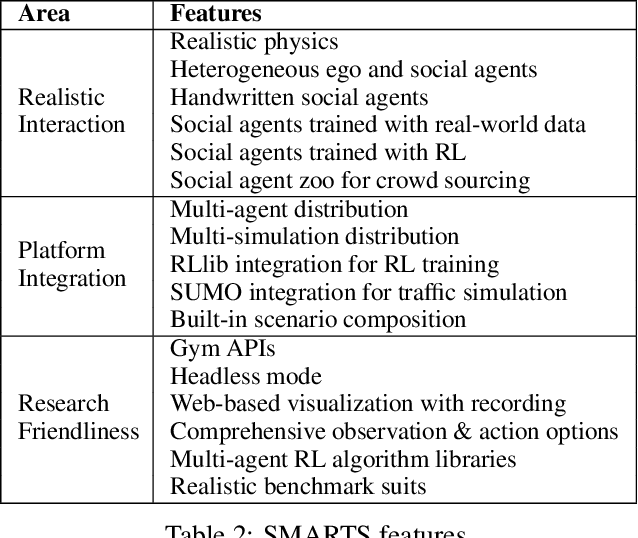
Multi-agent interaction is a fundamental aspect of autonomous driving in the real world. Despite more than a decade of research and development, the problem of how to competently interact with diverse road users in diverse scenarios remains largely unsolved. Learning methods have much to offer towards solving this problem. But they require a realistic multi-agent simulator that generates diverse and competent driving interactions. To meet this need, we develop a dedicated simulation platform called SMARTS (Scalable Multi-Agent RL Training School). SMARTS supports the training, accumulation, and use of diverse behavior models of road users. These are in turn used to create increasingly more realistic and diverse interactions that enable deeper and broader research on multi-agent interaction. In this paper, we describe the design goals of SMARTS, explain its basic architecture and its key features, and illustrate its use through concrete multi-agent experiments on interactive scenarios. We open-source the SMARTS platform and the associated benchmark tasks and evaluation metrics to encourage and empower research on multi-agent learning for autonomous driving. Our code is available at https://github.com/huawei-noah/SMARTS.