 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBird Classification
Papers and Code
Audio-to-Image Bird Species Retrieval without Audio-Image Pairs via Text Distillation
Jan 31, 2026Audio-to-image retrieval offers an interpretable alternative to audio-only classification for bioacoustic species recognition, but learning aligned audio-image representations is challenging due to the scarcity of paired audio-image data. We propose a simple and data-efficient approach that enables audio-to-image retrieval without any audio-image supervision. Our proposed method uses text as a semantic intermediary: we distill the text embedding space of a pretrained image-text model (BioCLIP-2), which encodes rich visual and taxonomic structure, into a pretrained audio-text model (BioLingual) by fine-tuning its audio encoder with a contrastive objective. This distillation transfers visually grounded semantics into the audio representation, inducing emergent alignment between audio and image embeddings without using images during training. We evaluate the resulting model on multiple bioacoustic benchmarks. The distilled audio encoder preserves audio discriminative power while substantially improving audio-text alignment on focal recordings and soundscape datasets. Most importantly, on the SSW60 benchmark, the proposed approach achieves strong audio-to-image retrieval performance exceeding baselines based on zero-shot model combinations or learned mappings between text embeddings, despite not training on paired audio-image data. These results demonstrate that indirect semantic transfer through text is sufficient to induce meaningful audio-image alignment, providing a practical solution for visually grounded species recognition in data-scarce bioacoustic settings.
YOLOBirDrone: Dataset for Bird vs Drone Detection and Classification and a YOLO based enhanced learning architecture
Jan 13, 2026The use of aerial drones for commercial and defense applications has benefited in many ways and is therefore utilized in several different application domains. However, they are also increasingly used for targeted attacks, posing a significant safety challenge and necessitating the development of drone detection systems. Vision-based drone detection systems currently have an accuracy limitation and struggle to distinguish between drones and birds, particularly when the birds are small in size. This research work proposes a novel YOLOBirDrone architecture that improves the detection and classification accuracy of birds and drones. YOLOBirDrone has different components, including an adaptive and extended layer aggregation (AELAN), a multi-scale progressive dual attention module (MPDA), and a reverse MPDA (RMPDA) to preserve shape information and enrich features with local and global spatial and channel information. A large-scale dataset, BirDrone, is also introduced in this article, which includes small and challenging objects for robust aerial object identification. Experimental results demonstrate an improvement in performance metrics through the proposed YOLOBirDrone architecture compared to other state-of-the-art algorithms, with detection accuracy reaching approximately 85% across various scenarios.
SAMAY: System for Acoustic Measurement and Analysis
Dec 15, 2025This paper describes an automatic bird call recording system called SAMAY, which is developed to study bird species by creating a database of large amounts of bird acoustic data. By analysing the recorded bird call data, the system can also be used for automatic classification of bird species, monitoring bird populations and analysing the impact of environmental changes. The system is driven through a powerful STM32F407 series microcontroller, supports 4 microphones, is equipped with 128 GB of storage capacity, and is powered by a 10400 mAh battery pack interfaced with a solar charger. In addition, the device is user-configurable over USB and Wi-Fi during runtime, ensuring user-friendly operation during field deployment.
Uncertainty Calibration of Multi-Label Bird Sound Classifiers
Nov 11, 2025Passive acoustic monitoring enables large-scale biodiversity assessment, but reliable classification of bioacoustic sounds requires not only high accuracy but also well-calibrated uncertainty estimates to ground decision-making. In bioacoustics, calibration is challenged by overlapping vocalisations, long-tailed species distributions, and distribution shifts between training and deployment data. The calibration of multi-label deep learning classifiers within the domain of bioacoustics has not yet been assessed. We systematically benchmark the calibration of four state-of-the-art multi-label bird sound classifiers on the BirdSet benchmark, evaluating both global, per-dataset and per-class calibration using threshold-free calibration metrics (ECE, MCS) alongside discrimination metrics (cmAP). Model calibration varies significantly across datasets and classes. While Perch v2 and ConvNeXt$_{BS}$ show better global calibration, results vary between datasets. Both models indicate consistent underconfidence, while AudioProtoPNet and BirdMAE are mostly overconfident. Surprisingly, calibration seems to be better for less frequent classes. Using simple post hoc calibration methods we demonstrate a straightforward way to improve calibration. A small labelled calibration set is sufficient to significantly improve calibration with Platt scaling, while global calibration parameters suffer from dataset variability. Our findings highlight the importance of evaluating and improving uncertainty calibration in bioacoustic classifiers.
Beyond SELECT: A Comprehensive Taxonomy-Guided Benchmark for Real-World Text-to-SQL Translation
Nov 17, 2025Text-to-SQL datasets are essential for training and evaluating text-to-SQL models, but existing datasets often suffer from limited coverage and fail to capture the diversity of real-world applications. To address this, we propose a novel taxonomy for text-to-SQL classification based on dimensions including core intents, statement types, syntax structures, and key actions. Using this taxonomy, we evaluate widely used public text-to-SQL datasets (e.g., Spider and Bird) and reveal limitations in their coverage and diversity. We then introduce a taxonomy-guided dataset synthesis pipeline, yielding a new dataset named SQL-Synth. This approach combines the taxonomy with Large Language Models (LLMs) to ensure the dataset reflects the breadth and complexity of real-world text-to-SQL applications. Extensive analysis and experimental results validate the effectiveness of our taxonomy, as SQL-Synth exhibits greater diversity and coverage compared to existing benchmarks. Moreover, we uncover that existing LLMs typically fall short in adequately capturing the full range of scenarios, resulting in limited performance on SQL-Synth. However, fine-tuning can substantially improve their performance in these scenarios. The proposed taxonomy has significant potential impact, as it not only enables comprehensive analysis of datasets and the performance of different LLMs, but also guides the construction of training data for LLMs.
CleverBirds: A Multiple-Choice Benchmark for Fine-grained Human Knowledge Tracing
Nov 11, 2025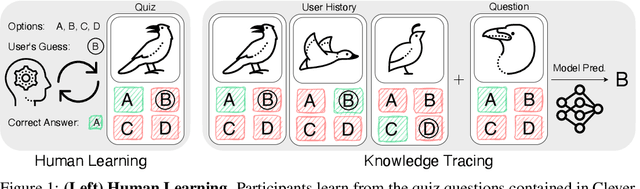

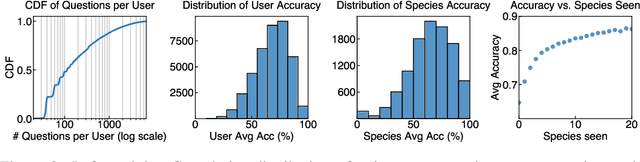
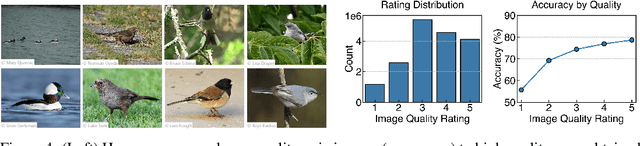
Mastering fine-grained visual recognition, essential in many expert domains, can require that specialists undergo years of dedicated training. Modeling the progression of such expertize in humans remains challenging, and accurately inferring a human learner's knowledge state is a key step toward understanding visual learning. We introduce CleverBirds, a large-scale knowledge tracing benchmark for fine-grained bird species recognition. Collected by the citizen-science platform eBird, it offers insight into how individuals acquire expertize in complex fine-grained classification. More than 40,000 participants have engaged in the quiz, answering over 17 million multiple-choice questions spanning over 10,000 bird species, with long-range learning patterns across an average of 400 questions per participant. We release this dataset to support the development and evaluation of new methods for visual knowledge tracing. We show that tracking learners' knowledge is challenging, especially across participant subgroups and question types, with different forms of contextual information offering varying degrees of predictive benefit. CleverBirds is among the largest benchmark of its kind, offering a substantially higher number of learnable concepts. With it, we hope to enable new avenues for studying the development of visual expertize over time and across individuals.
Mapping fNIRS Signals to Agent Performance: Toward Reinforcement Learning from Neural Feedback
Nov 17, 2025Reinforcement Learning from Human Feedback (RLHF) is a methodology that aligns agent behavior with human preferences by integrating human feedback into the agent's training process. We introduce a possible framework that employs passive Brain-Computer Interfaces (BCI) to guide agent training from implicit neural signals. We present and release a novel dataset of functional near-infrared spectroscopy (fNIRS) recordings collected from 25 human participants across three domains: a Pick-and-Place Robot, Lunar Lander, and Flappy Bird. We train classifiers to predict levels of agent performance (optimal, sub-optimal, or worst-case) from windows of preprocessed fNIRS feature vectors, achieving an average F1 score of 67% for binary classification and 46% for multi-class models averaged across conditions and domains. We also train regressors to predict the degree of deviation between an agent's chosen action and a set of near-optimal policies, providing a continuous measure of performance. We evaluate cross-subject generalization and demonstrate that fine-tuning pre-trained models with a small sample of subject-specific data increases average F1 scores by 17% and 41% for binary and multi-class models, respectively. Our work demonstrates that mapping implicit fNIRS signals to agent performance is feasible and can be improved, laying the foundation for future brain-driven RLHF systems.
Stable neural networks and connections to continuous dynamical systems
Oct 25, 2025The existence of instabilities, for example in the form of adversarial examples, has given rise to a highly active area of research concerning itself with understanding and enhancing the stability of neural networks. We focus on a popular branch within this area which draws on connections to continuous dynamical systems and optimal control, giving a bird's eye view of this area. We identify and describe the fundamental concepts that underlie much of the existing work in this area. Following this, we go into more detail on a specific approach to designing stable neural networks, developing the theoretical background and giving a description of how these networks can be implemented. We provide code that implements the approach that can be adapted and extended by the reader. The code further includes a notebook with a fleshed-out toy example on adversarial robustness of image classification that can be run without heavy requirements on the reader's computer. We finish by discussing this toy example so that the reader can interactively follow along on their computer. This work will be included as a chapter of a book on scientific machine learning, which is currently under revision and aimed at students.
BirdRecorder's AI on Sky: Safeguarding birds of prey by detection and classification of tiny objects around wind turbines
Aug 25, 2025



The urgent need for renewable energy expansion, particularly wind power, is hindered by conflicts with wildlife conservation. To address this, we developed BirdRecorder, an advanced AI-based anti-collision system to protect endangered birds, especially the red kite (Milvus milvus). Integrating robotics, telemetry, and high-performance AI algorithms, BirdRecorder aims to detect, track, and classify avian species within a range of 800 m to minimize bird-turbine collisions. BirdRecorder integrates advanced AI methods with optimized hardware and software architectures to enable real-time image processing. Leveraging Single Shot Detector (SSD) for detection, combined with specialized hardware acceleration and tracking algorithms, our system achieves high detection precision while maintaining the speed necessary for real-time decision-making. By combining these components, BirdRecorder outperforms existing approaches in both accuracy and efficiency. In this paper, we summarize results on field tests and performance of the BirdRecorder system. By bridging the gap between renewable energy expansion and wildlife conservation, BirdRecorder contributes to a more sustainable coexistence of technology and nature.
Explainability of CNN Based Classification Models for Acoustic Signal
Sep 10, 2025Explainable Artificial Intelligence (XAI) has emerged as a critical tool for interpreting the predictions of complex deep learning models. While XAI has been increasingly applied in various domains within acoustics, its use in bioacoustics, which involves analyzing audio signals from living organisms, remains relatively underexplored. In this paper, we investigate the vocalizations of a bird species with strong geographic variation throughout its range in North America. Audio recordings were converted into spectrogram images and used to train a deep Convolutional Neural Network (CNN) for classification, achieving an accuracy of 94.8\%. To interpret the model's predictions, we applied both model-agnostic (LIME, SHAP) and model-specific (DeepLIFT, Grad-CAM) XAI techniques. These techniques produced different but complementary explanations, and when their explanations were considered together, they provided more complete and interpretable insights into the model's decision-making. This work highlights the importance of using a combination of XAI techniques to improve trust and interoperability, not only in broader acoustics signal analysis but also argues for broader applicability in different domain specific tasks.