 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFSOD-VFM: Few-Shot Object Detection with Vision Foundation Models and Graph Diffusion
Feb 03, 2026In this paper, we present FSOD-VFM: Few-Shot Object Detectors with Vision Foundation Models, a framework that leverages vision foundation models to tackle the challenge of few-shot object detection. FSOD-VFM integrates three key components: a universal proposal network (UPN) for category-agnostic bounding box generation, SAM2 for accurate mask extraction, and DINOv2 features for efficient adaptation to new object categories. Despite the strong generalization capabilities of foundation models, the bounding boxes generated by UPN often suffer from overfragmentation, covering only partial object regions and leading to numerous small, false-positive proposals rather than accurate, complete object detections. To address this issue, we introduce a novel graph-based confidence reweighting method. In our approach, predicted bounding boxes are modeled as nodes in a directed graph, with graph diffusion operations applied to propagate confidence scores across the network. This reweighting process refines the scores of proposals, assigning higher confidence to whole objects and lower confidence to local, fragmented parts. This strategy improves detection granularity and effectively reduces the occurrence of false-positive bounding box proposals. Through extensive experiments on Pascal-5$^i$, COCO-20$^i$, and CD-FSOD datasets, we demonstrate that our method substantially outperforms existing approaches, achieving superior performance without requiring additional training. Notably, on the challenging CD-FSOD dataset, which spans multiple datasets and domains, our FSOD-VFM achieves 31.6 AP in the 10-shot setting, substantially outperforming previous training-free methods that reach only 21.4 AP. Code is available at: https://intellindust-ai-lab.github.io/projects/FSOD-VFM.
SoccerNet 2025 Challenges Results
Aug 26, 2025The SoccerNet 2025 Challenges mark the fifth annual edition of the SoccerNet open benchmarking effort, dedicated to advancing computer vision research in football video understanding. This year's challenges span four vision-based tasks: (1) Team Ball Action Spotting, focused on detecting ball-related actions in football broadcasts and assigning actions to teams; (2) Monocular Depth Estimation, targeting the recovery of scene geometry from single-camera broadcast clips through relative depth estimation for each pixel; (3) Multi-View Foul Recognition, requiring the analysis of multiple synchronized camera views to classify fouls and their severity; and (4) Game State Reconstruction, aimed at localizing and identifying all players from a broadcast video to reconstruct the game state on a 2D top-view of the field. Across all tasks, participants were provided with large-scale annotated datasets, unified evaluation protocols, and strong baselines as starting points. This report presents the results of each challenge, highlights the top-performing solutions, and provides insights into the progress made by the community. The SoccerNet Challenges continue to serve as a driving force for reproducible, open research at the intersection of computer vision, artificial intelligence, and sports. Detailed information about the tasks, challenges, and leaderboards can be found at https://www.soccer-net.org, with baselines and development kits available at https://github.com/SoccerNet.
SURE: SUrvey REcipes for building reliable and robust deep networks
Mar 01, 2024



In this paper, we revisit techniques for uncertainty estimation within deep neural networks and consolidate a suite of techniques to enhance their reliability. Our investigation reveals that an integrated application of diverse techniques--spanning model regularization, classifier and optimization--substantially improves the accuracy of uncertainty predictions in image classification tasks. The synergistic effect of these techniques culminates in our novel SURE approach. We rigorously evaluate SURE against the benchmark of failure prediction, a critical testbed for uncertainty estimation efficacy. Our results showcase a consistently better performance than models that individually deploy each technique, across various datasets and model architectures. When applied to real-world challenges, such as data corruption, label noise, and long-tailed class distribution, SURE exhibits remarkable robustness, delivering results that are superior or on par with current state-of-the-art specialized methods. Particularly on Animal-10N and Food-101N for learning with noisy labels, SURE achieves state-of-the-art performance without any task-specific adjustments. This work not only sets a new benchmark for robust uncertainty estimation but also paves the way for its application in diverse, real-world scenarios where reliability is paramount. Our code is available at \url{https://yutingli0606.github.io/SURE/}.
InfraParis: A multi-modal and multi-task autonomous driving dataset
Sep 27, 2023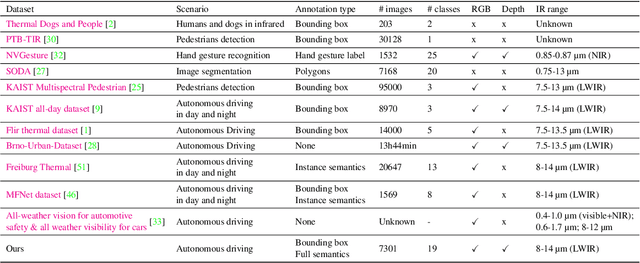
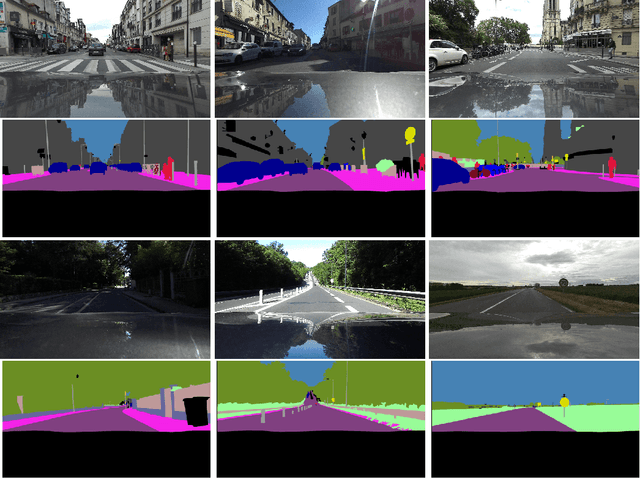
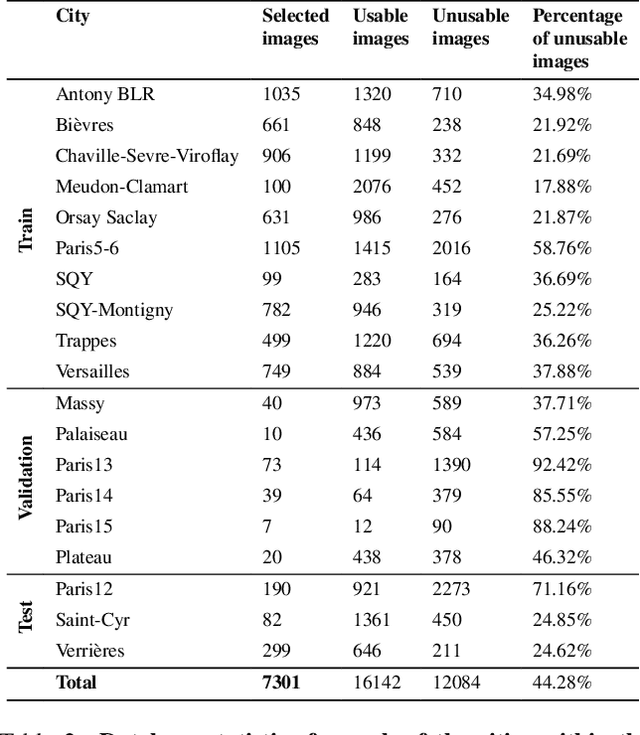
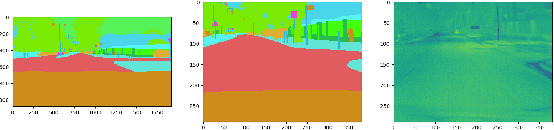
Current deep neural networks (DNNs) for autonomous driving computer vision are typically trained on specific datasets that only involve a single type of data and urban scenes. Consequently, these models struggle to handle new objects, noise, nighttime conditions, and diverse scenarios, which is essential for safety-critical applications. Despite ongoing efforts to enhance the resilience of computer vision DNNs, progress has been sluggish, partly due to the absence of benchmarks featuring multiple modalities. We introduce a novel and versatile dataset named InfraParis that supports multiple tasks across three modalities: RGB, depth, and infrared. We assess various state-of-the-art baseline techniques, encompassing models for the tasks of semantic segmentation, object detection, and depth estimation.
The Robust Semantic Segmentation UNCV2023 Challenge Results
Sep 27, 2023



This paper outlines the winning solutions employed in addressing the MUAD uncertainty quantification challenge held at ICCV 2023. The challenge was centered around semantic segmentation in urban environments, with a particular focus on natural adversarial scenarios. The report presents the results of 19 submitted entries, with numerous techniques drawing inspiration from cutting-edge uncertainty quantification methodologies presented at prominent conferences in the fields of computer vision and machine learning and journals over the past few years. Within this document, the challenge is introduced, shedding light on its purpose and objectives, which primarily revolved around enhancing the robustness of semantic segmentation in urban scenes under varying natural adversarial conditions. The report then delves into the top-performing solutions. Moreover, the document aims to provide a comprehensive overview of the diverse solutions deployed by all participants. By doing so, it seeks to offer readers a deeper insight into the array of strategies that can be leveraged to effectively handle the inherent uncertainties associated with autonomous driving and semantic segmentation, especially within urban environments.
Discretization-Induced Dirichlet Posterior for Robust Uncertainty Quantification on Regression
Aug 17, 2023



Uncertainty quantification is critical for deploying deep neural networks (DNNs) in real-world applications. An Auxiliary Uncertainty Estimator (AuxUE) is one of the most effective means to estimate the uncertainty of the main task prediction without modifying the main task model. To be considered robust, an AuxUE must be capable of maintaining its performance and triggering higher uncertainties while encountering Out-of-Distribution (OOD) inputs, i.e., to provide robust aleatoric and epistemic uncertainty. However, for vision regression tasks, current AuxUE designs are mainly adopted for aleatoric uncertainty estimates, and AuxUE robustness has not been explored. In this work, we propose a generalized AuxUE scheme for more robust uncertainty quantification on regression tasks. Concretely, to achieve a more robust aleatoric uncertainty estimation, different distribution assumptions are considered for heteroscedastic noise, and Laplace distribution is finally chosen to approximate the prediction error. For epistemic uncertainty, we propose a novel solution named Discretization-Induced Dirichlet pOsterior (DIDO), which models the Dirichlet posterior on the discretized prediction error. Extensive experiments on age estimation, monocular depth estimation, and super-resolution tasks show that our proposed method can provide robust uncertainty estimates in the face of noisy inputs and that it can be scalable to both image-level and pixel-wise tasks.
Latent Discriminant deterministic Uncertainty
Jul 20, 2022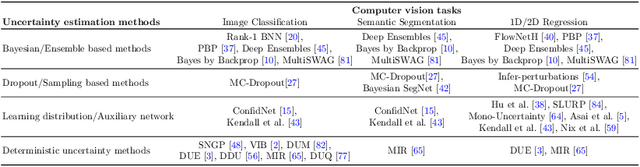
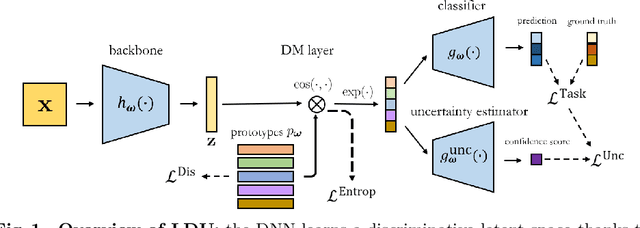
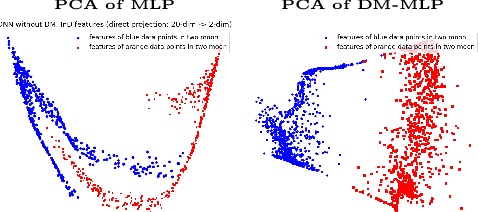
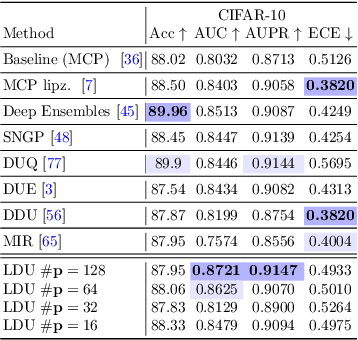
Predictive uncertainty estimation is essential for deploying Deep Neural Networks in real-world autonomous systems. However, most successful approaches are computationally intensive. In this work, we attempt to address these challenges in the context of autonomous driving perception tasks. Recently proposed Deterministic Uncertainty Methods (DUM) can only partially meet such requirements as their scalability to complex computer vision tasks is not obvious. In this work we advance a scalable and effective DUM for high-resolution semantic segmentation, that relaxes the Lipschitz constraint typically hindering practicality of such architectures. We learn a discriminant latent space by leveraging a distinction maximization layer over an arbitrarily-sized set of trainable prototypes. Our approach achieves competitive results over Deep Ensembles, the state-of-the-art for uncertainty prediction, on image classification, segmentation and monocular depth estimation tasks. Our code is available at https://github.com/ENSTA-U2IS/LDU
MUAD: Multiple Uncertainties for Autonomous Driving benchmark for multiple uncertainty types and tasks
Mar 02, 2022
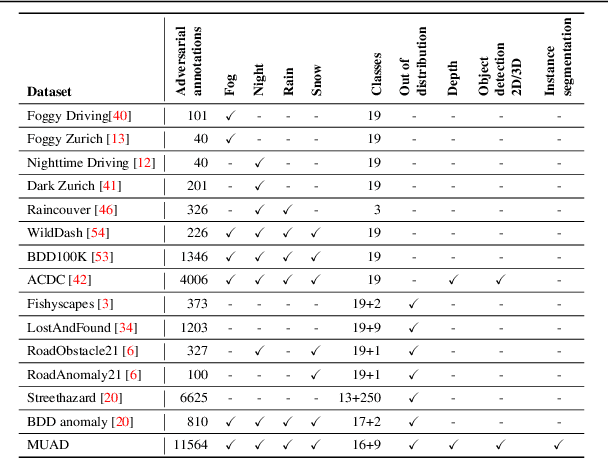
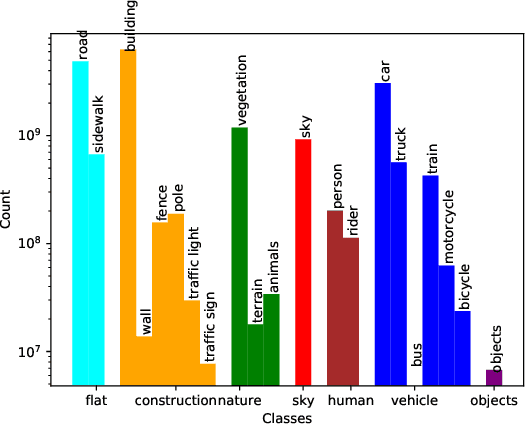
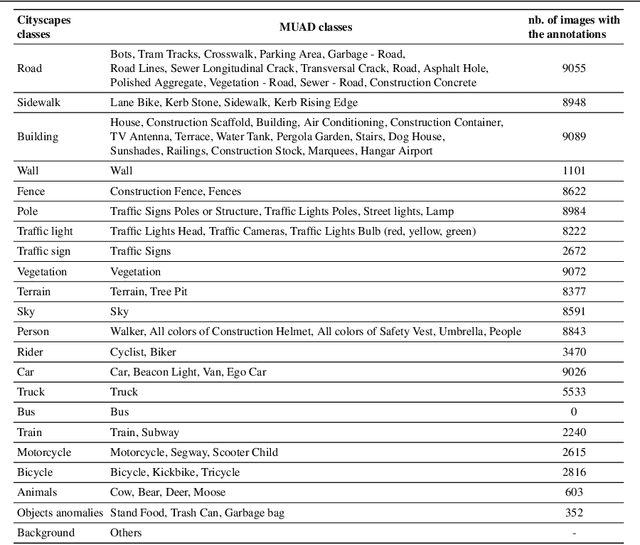
Predictive uncertainty estimation is essential for deploying Deep Neural Networks in real-world autonomous systems. However, disentangling the different types and sources of uncertainty is non trivial in most datasets, especially since there is no ground truth for uncertainty. In addition, different degrees of weather conditions can disrupt neural networks, resulting in inconsistent training data quality. Thus, we introduce the MUAD dataset (Multiple Uncertainties for Autonomous Driving), consisting of 8,500 realistic synthetic images with diverse adverse weather conditions (night, fog, rain, snow), out-of-distribution objects and annotations for semantic segmentation, depth estimation, object and instance detection. MUAD allows to better assess the impact of different sources of uncertainty on model performance. We propose a study that shows the importance of having reliable Deep Neural Networks (DNNs) in multiple experiments, and will release our dataset to allow researchers to benchmark their algorithm methodically in ad-verse conditions. More information and the download link for MUAD are available at https://muad-dataset.github.io/ .
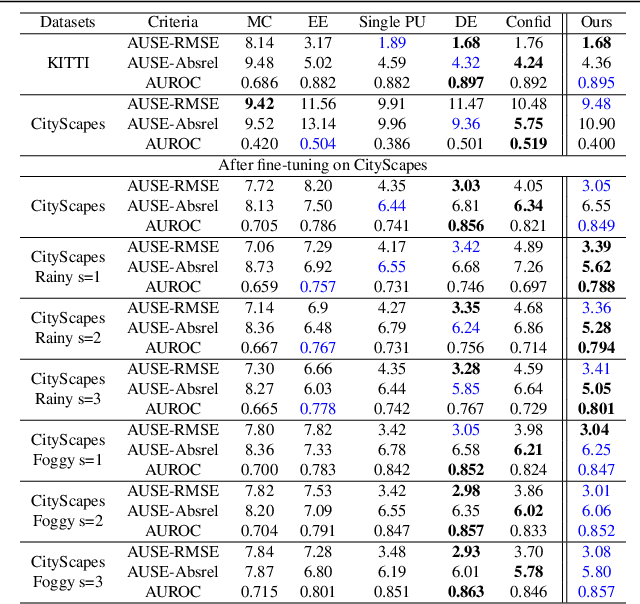
On Monocular Depth Estimation and Uncertainty Quantification using Classification Approaches for Regression
Feb 24, 2022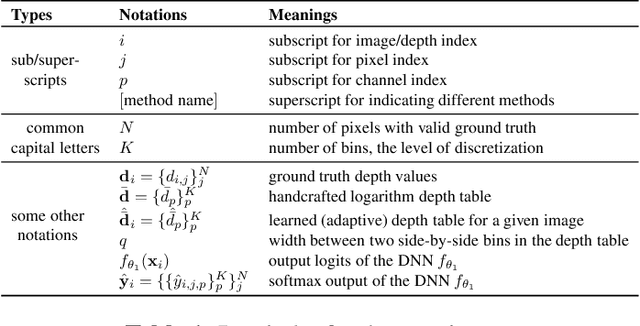
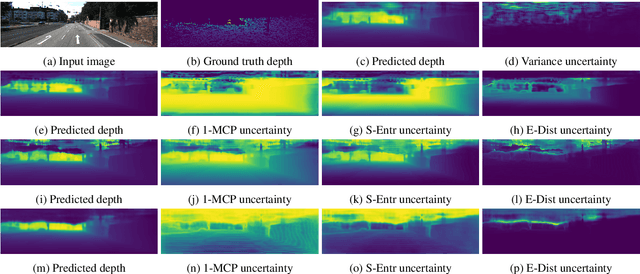
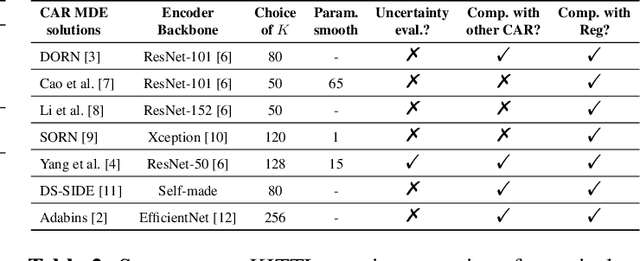
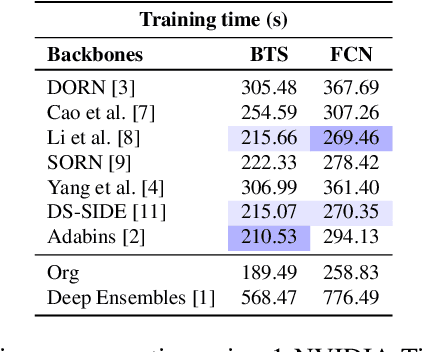
Monocular depth is important in many tasks, such as 3D reconstruction and autonomous driving. Deep learning based models achieve state-of-the-art performance in this field. A set of novel approaches for estimating monocular depth consists of transforming the regression task into a classification one. However, there is a lack of detailed descriptions and comparisons for Classification Approaches for Regression (CAR) in the community and no in-depth exploration of their potential for uncertainty estimation. To this end, this paper will introduce a taxonomy and summary of CAR approaches, a new uncertainty estimation solution for CAR, and a set of experiments on depth accuracy and uncertainty quantification for CAR-based models on KITTI dataset. The experiments reflect the differences in the portability of various CAR methods on two backbones. Meanwhile, the newly proposed method for uncertainty estimation can outperform the ensembling method with only one forward propagation.
SLURP: Side Learning Uncertainty for Regression Problems
Oct 21, 2021
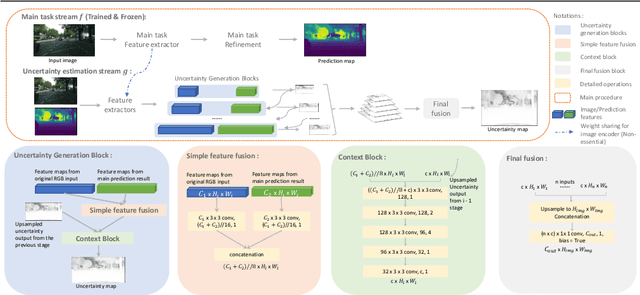
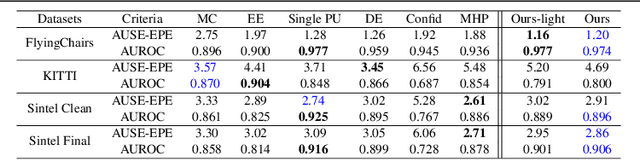
It has become critical for deep learning algorithms to quantify their output uncertainties to satisfy reliability constraints and provide accurate results. Uncertainty estimation for regression has received less attention than classification due to the more straightforward standardized output of the latter class of tasks and their high importance. However, regression problems are encountered in a wide range of applications in computer vision. We propose SLURP, a generic approach for regression uncertainty estimation via a side learner that exploits the output and the intermediate representations generated by the main task model. We test SLURP on two critical regression tasks in computer vision: monocular depth and optical flow estimation. In addition, we conduct exhaustive benchmarks comprising transfer to different datasets and the addition of aleatoric noise. The results show that our proposal is generic and readily applicable to various regression problems and has a low computational cost with respect to existing solutions.