 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMUAD: Multiple Uncertainties for Autonomous Driving benchmark for multiple uncertainty types and tasks
Paper and Code

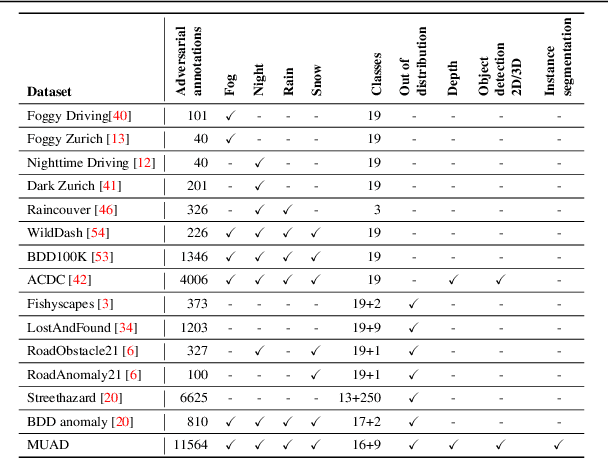
Predictive uncertainty estimation is essential for deploying Deep Neural Networks in real-world autonomous systems. However, disentangling the different types and sources of uncertainty is non trivial in most datasets, especially since there is no ground truth for uncertainty. In addition, different degrees of weather conditions can disrupt neural networks, resulting in inconsistent training data quality. Thus, we introduce the MUAD dataset (Multiple Uncertainties for Autonomous Driving), consisting of 8,500 realistic synthetic images with diverse adverse weather conditions (night, fog, rain, snow), out-of-distribution objects and annotations for semantic segmentation, depth estimation, object and instance detection. MUAD allows to better assess the impact of different sources of uncertainty on model performance. We propose a study that shows the importance of having reliable Deep Neural Networks (DNNs) in multiple experiments, and will release our dataset to allow researchers to benchmark their algorithm methodically in ad-verse conditions. More information and the download link for MUAD are available at https://muad-dataset.github.io/ .