 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReservoir-enhanced Segment Anything Model for Subsurface Diagnosis
Apr 26, 2025Urban roads and infrastructure, vital to city operations, face growing threats from subsurface anomalies like cracks and cavities. Ground Penetrating Radar (GPR) effectively visualizes underground conditions employing electromagnetic (EM) waves; however, accurate anomaly detection via GPR remains challenging due to limited labeled data, varying subsurface conditions, and indistinct target boundaries. Although visually image-like, GPR data fundamentally represent EM waves, with variations within and between waves critical for identifying anomalies. Addressing these, we propose the Reservoir-enhanced Segment Anything Model (Res-SAM), an innovative framework exploiting both visual discernibility and wave-changing properties of GPR data. Res-SAM initially identifies apparent candidate anomaly regions given minimal prompts, and further refines them by analyzing anomaly-induced changing information within and between EM waves in local GPR data, enabling precise and complete anomaly region extraction and category determination. Real-world experiments demonstrate that Res-SAM achieves high detection accuracy (>85%) and outperforms state-of-the-art. Notably, Res-SAM requires only minimal accessible non-target data, avoids intensive training, and incorporates simple human interaction to enhance reliability. Our research provides a scalable, resource-efficient solution for rapid subsurface anomaly detection across diverse environments, improving urban safety monitoring while reducing manual effort and computational cost.
Phi-4-Mini Technical Report: Compact yet Powerful Multimodal Language Models via Mixture-of-LoRAs
Mar 03, 2025



We introduce Phi-4-Mini and Phi-4-Multimodal, compact yet highly capable language and multimodal models. Phi-4-Mini is a 3.8-billion-parameter language model trained on high-quality web and synthetic data, significantly outperforming recent open-source models of similar size and matching the performance of models twice its size on math and coding tasks requiring complex reasoning. This achievement is driven by a carefully curated synthetic data recipe emphasizing high-quality math and coding datasets. Compared to its predecessor, Phi-3.5-Mini, Phi-4-Mini features an expanded vocabulary size of 200K tokens to better support multilingual applications, as well as group query attention for more efficient long-sequence generation. Phi-4-Multimodal is a multimodal model that integrates text, vision, and speech/audio input modalities into a single model. Its novel modality extension approach leverages LoRA adapters and modality-specific routers to allow multiple inference modes combining various modalities without interference. For example, it now ranks first in the OpenASR leaderboard to date, although the LoRA component of the speech/audio modality has just 460 million parameters. Phi-4-Multimodal supports scenarios involving (vision + language), (vision + speech), and (speech/audio) inputs, outperforming larger vision-language and speech-language models on a wide range of tasks. Additionally, we experiment to further train Phi-4-Mini to enhance its reasoning capabilities. Despite its compact 3.8-billion-parameter size, this experimental version achieves reasoning performance on par with or surpassing significantly larger models, including DeepSeek-R1-Distill-Qwen-7B and DeepSeek-R1-Distill-Llama-8B.
MTMT: Consolidating Multiple Thinking Modes to Form a Thought Tree for Strengthening LLM
Dec 05, 2024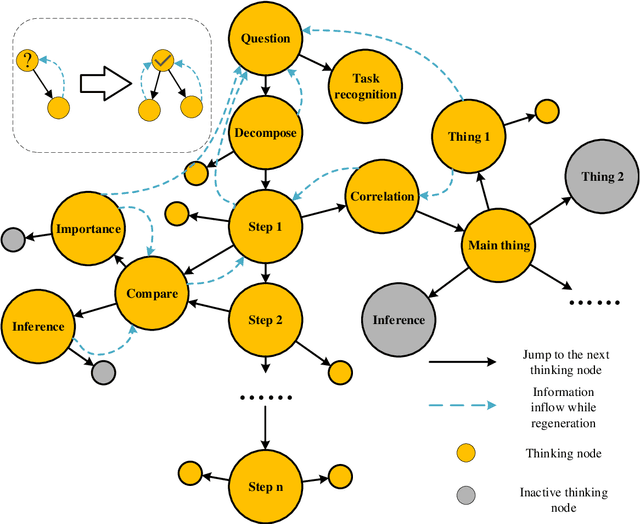
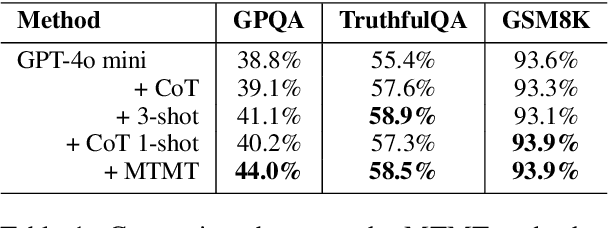
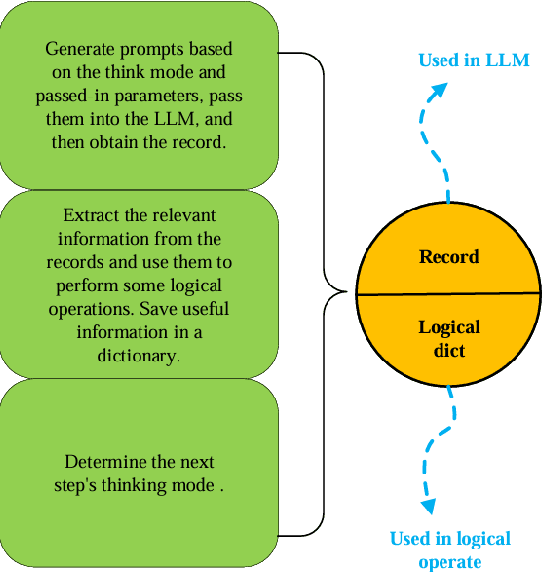
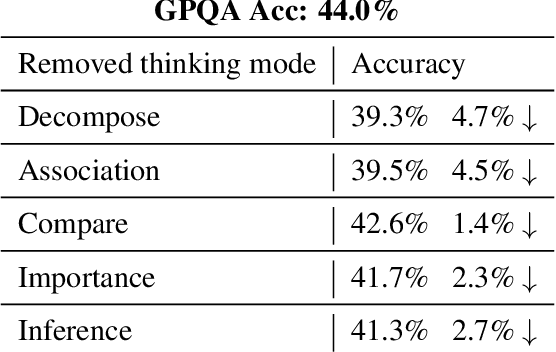
Large language models (LLMs) have shown limitations in tasks requiring complex logical reasoning and multi-step problem-solving. To address these challenges, researchers have employed carefully designed prompts and flowcharts, simulating human cognitive processes to enhance LLM performance, such as the Chain of Thought approach. In this paper, we introduce MTMT (Multi-thinking Modes Tree), a novel method that interacts with LLMs to construct a thought tree, simulating various advanced cognitive processes, including but not limited to association, counterfactual thinking, task decomposition, and comparison. By breaking down the original complex task into simpler sub-questions, MTMT facilitates easier problem-solving for LLMs, enabling more effective utilization of the latent knowledge within LLMs. We evaluate the performance of MTMT under different parameter configurations, using GPT-4o mini as the base model. Our results demonstrate that integrating multiple modes of thinking significantly enhances the ability of LLMs to handle complex tasks.
Phi-3 Technical Report: A Highly Capable Language Model Locally on Your Phone
Apr 23, 2024
We introduce phi-3-mini, a 3.8 billion parameter language model trained on 3.3 trillion tokens, whose overall performance, as measured by both academic benchmarks and internal testing, rivals that of models such as Mixtral 8x7B and GPT-3.5 (e.g., phi-3-mini achieves 69% on MMLU and 8.38 on MT-bench), despite being small enough to be deployed on a phone. The innovation lies entirely in our dataset for training, a scaled-up version of the one used for phi-2, composed of heavily filtered web data and synthetic data. The model is also further aligned for robustness, safety, and chat format. We also provide some initial parameter-scaling results with a 7B and 14B models trained for 4.8T tokens, called phi-3-small and phi-3-medium, both significantly more capable than phi-3-mini (e.g., respectively 75% and 78% on MMLU, and 8.7 and 8.9 on MT-bench).
Underground Diagnosis Based on GPR and Learning in the Model Space
Nov 25, 2022Ground Penetrating Radar (GPR) has been widely used in pipeline detection and underground diagnosis. In practical applications, the characteristics of the GPR data of the detected area and the likely underground anomalous structures could be rarely acknowledged before fully analyzing the obtained GPR data, causing challenges to identify the underground structures or abnormals automatically. In this paper, a GPR B-scan image diagnosis method based on learning in the model space is proposed. The idea of learning in the model space is to use models fitted on parts of data as more stable and parsimonious representations of the data. For the GPR image, 2-Direction Echo State Network (2D-ESN) is proposed to fit the image segments through the next item prediction. By building the connections between the points on the image in both the horizontal and vertical directions, the 2D-ESN regards the GPR image segment as a whole and could effectively capture the dynamic characteristics of the GPR image. And then, semi-supervised and supervised learning methods could be further implemented on the 2D-ESN models for underground diagnosis. Experiments on real-world datasets are conducted, and the results demonstrate the effectiveness of the proposed model.
Estimating the Direction and Radius of Pipe from GPR Image by Ellipse Inversion Model
Jan 25, 2022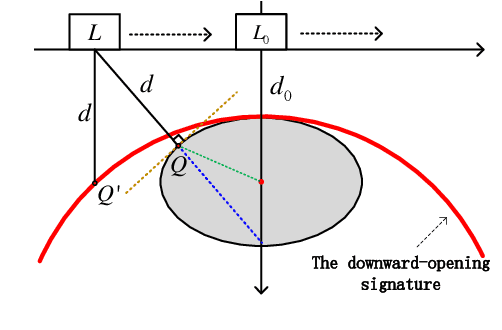
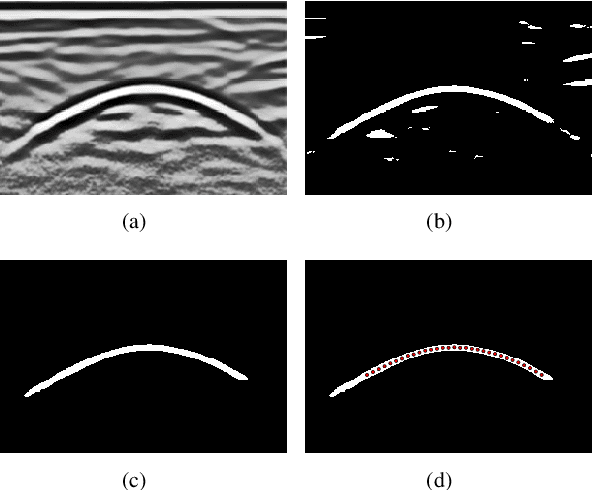
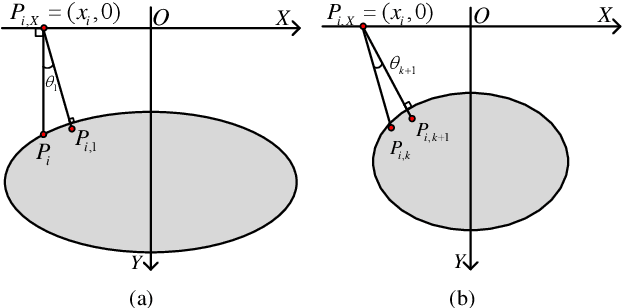
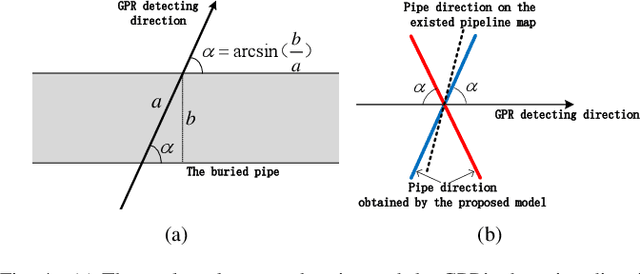
Ground Penetrating Radar (GPR) is widely used as a non-destructive approach to estimate buried utilities. When the GPR's detecting direction is perpendicular to a pipeline, a hyperbolic characteristic would be formed on the GPR B-scan image. However, in real-world applications, the direction of pipelines on the existing pipeline map could be inaccurate, and it is hard to ensure the moving direction of GPR to be actually perpendicular to underground pipelines. In this paper, a novel model is proposed to estimate the direction and radius of pipeline and revise the existing pipeline map from GPR B-scan images. The model consists of two parts: GPR B-scan image processing and Ellipse Iterative Inversion Algorithm (EIIA). Firstly, the GPR B-scan image is processed with downward-opening point set extracted. The obtained point set is then iteratively inverted to the elliptical cross section of the buried pipeline, which is caused by the angle between the GPR's detecting direction and the pipeline's direction. By minimizing the sum of the algebraic distances from the extracted point set to the inverted ellipse, the most likely pipeline's direction and radius are determined. Experiments on real-world datasets are conducted, and the results demonstrate the effectiveness of the method.
Mapping the Buried Cable by Ground Penetrating Radar and Gaussian-Process Regression
Jan 25, 2022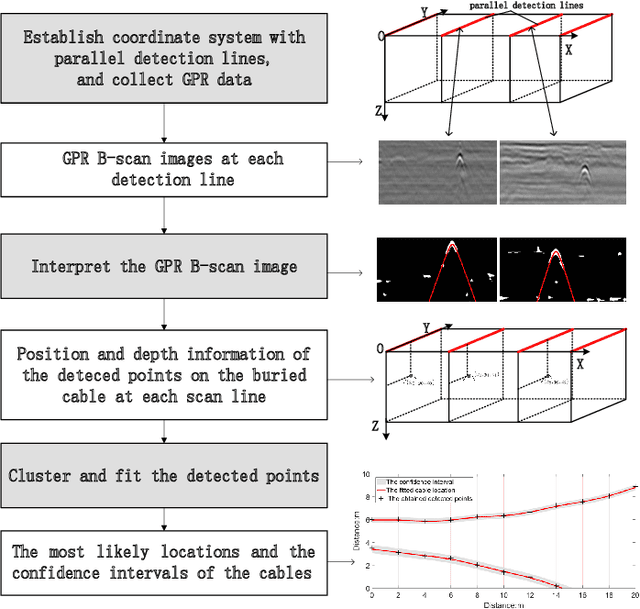
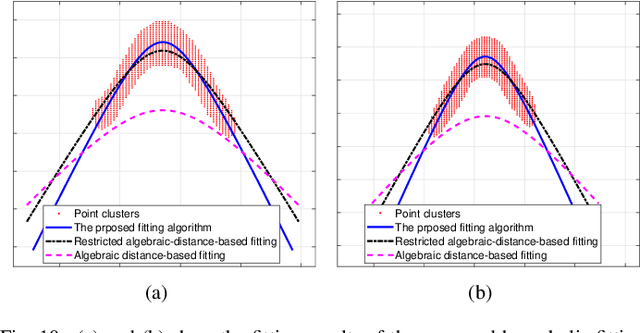
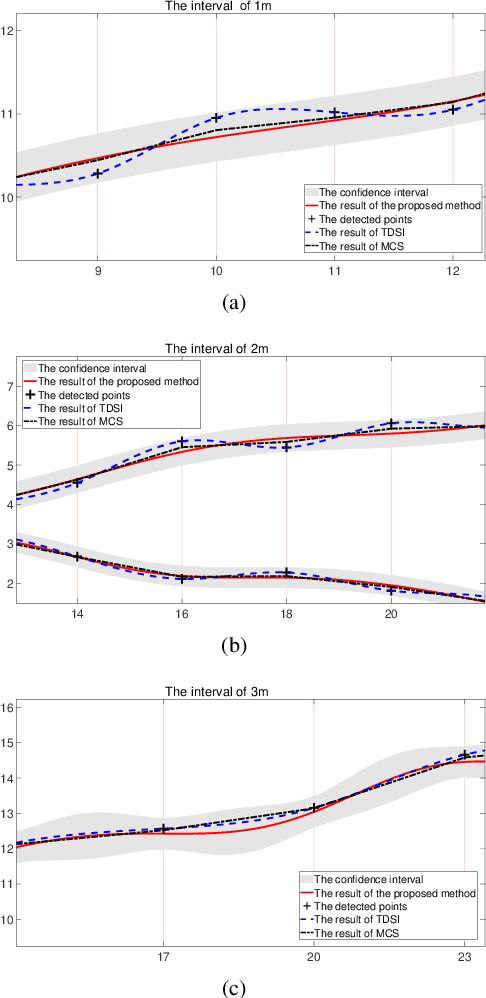
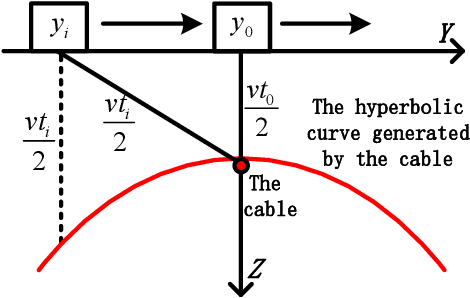
With the rapid expansion of urban areas and the increasingly use of electricity, the need for locating buried cables is becoming urgent. In this paper, a noval method to locate underground cables based on Ground Penetrating Radar (GPR) and Gaussian-process regression is proposed. Firstly, the coordinate system of the detected area is conducted, and the input and output of locating buried cables are determined. The GPR is moved along the established parallel detection lines, and the hyperbolic signatures generated by buried cables are identified and fitted, thus the positions and depths of some points on the cable could be derived. On the basis of the established coordinate system and the derived points on the cable, the clustering method and cable fitting algorithm based on Gaussian-process regression are proposed to find the most likely locations of the underground cables. Furthermore, the confidence intervals of the cable's locations are also obtained. Both the position and depth noises are taken into account in our method, ensuring the robustness and feasibility in different environments and equipments. Experiments on real-world datasets are conducted, and the obtained results demonstrate the effectiveness of the proposed method.
Towards robust and domain agnostic reinforcement learning competitions
Jun 07, 2021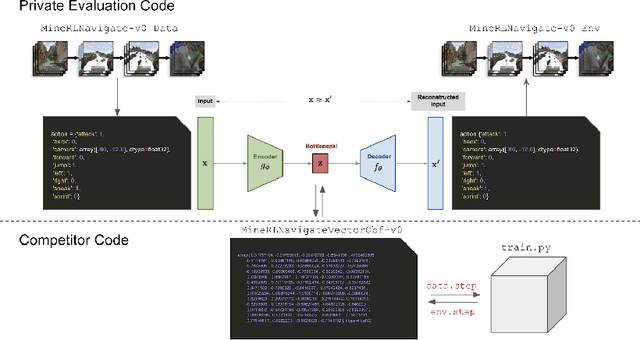
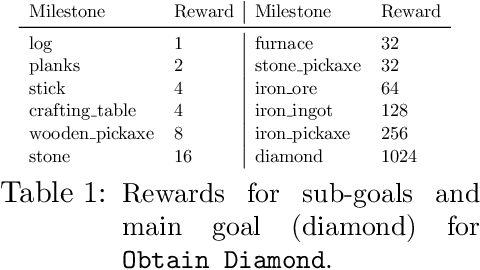
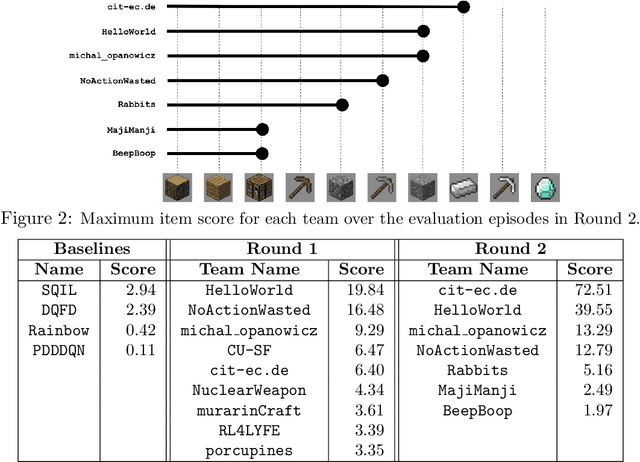
Reinforcement learning competitions have formed the basis for standard research benchmarks, galvanized advances in the state-of-the-art, and shaped the direction of the field. Despite this, a majority of challenges suffer from the same fundamental problems: participant solutions to the posed challenge are usually domain-specific, biased to maximally exploit compute resources, and not guaranteed to be reproducible. In this paper, we present a new framework of competition design that promotes the development of algorithms that overcome these barriers. We propose four central mechanisms for achieving this end: submission retraining, domain randomization, desemantization through domain obfuscation, and the limitation of competition compute and environment-sample budget. To demonstrate the efficacy of this design, we proposed, organized, and ran the MineRL 2020 Competition on Sample-Efficient Reinforcement Learning. In this work, we describe the organizational outcomes of the competition and show that the resulting participant submissions are reproducible, non-specific to the competition environment, and sample/resource efficient, despite the difficult competition task.
Rethink AI-based Power Grid Control: Diving Into Algorithm Design
Dec 23, 2020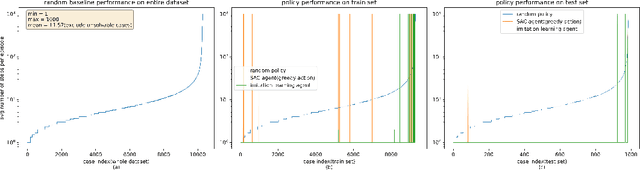
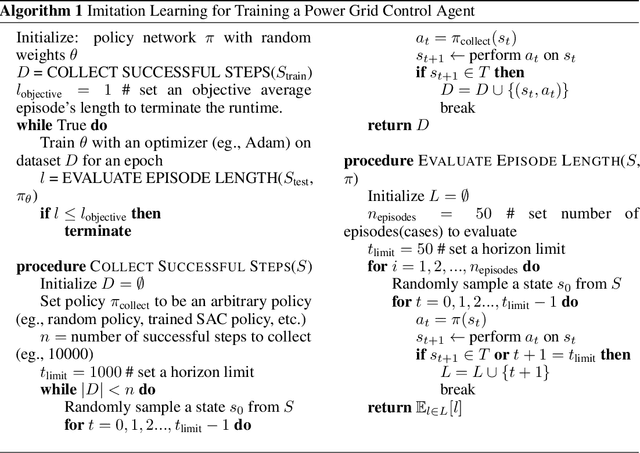
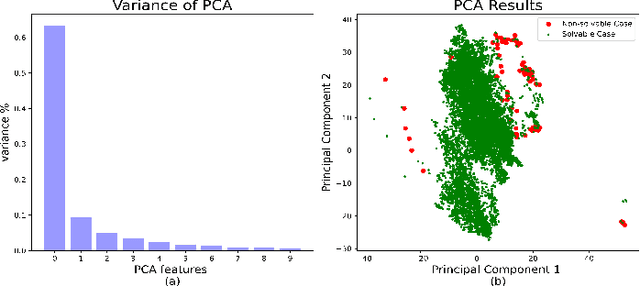
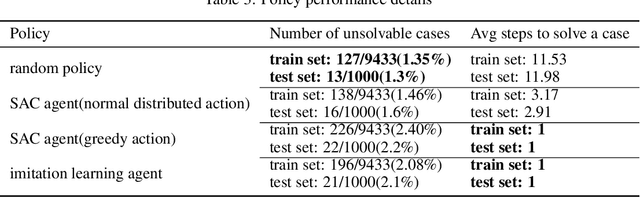
Recently, deep reinforcement learning (DRL)-based approach has shown promisein solving complex decision and control problems in power engineering domain.In this paper, we present an in-depth analysis of DRL-based voltage control fromaspects of algorithm selection, state space representation, and reward engineering.To resolve observed issues, we propose a novel imitation learning-based approachto directly map power grid operating points to effective actions without any interimreinforcement learning process. The performance results demonstrate that theproposed approach has strong generalization ability with much less training time.The agent trained by imitation learning is effective and robust to solve voltagecontrol problem and outperforms the former RL agents.