 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMTMT: Consolidating Multiple Thinking Modes to Form a Thought Tree for Strengthening LLM
Dec 05, 2024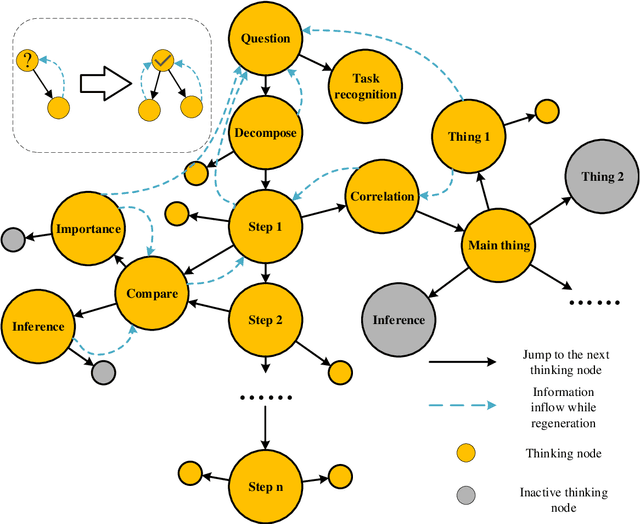
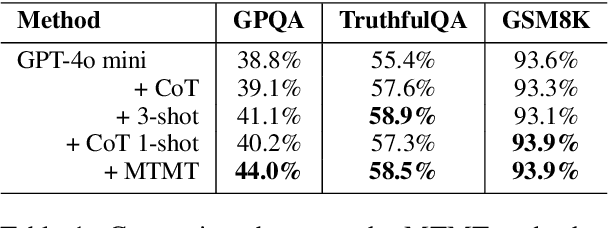
Large language models (LLMs) have shown limitations in tasks requiring complex logical reasoning and multi-step problem-solving. To address these challenges, researchers have employed carefully designed prompts and flowcharts, simulating human cognitive processes to enhance LLM performance, such as the Chain of Thought approach. In this paper, we introduce MTMT (Multi-thinking Modes Tree), a novel method that interacts with LLMs to construct a thought tree, simulating various advanced cognitive processes, including but not limited to association, counterfactual thinking, task decomposition, and comparison. By breaking down the original complex task into simpler sub-questions, MTMT facilitates easier problem-solving for LLMs, enabling more effective utilization of the latent knowledge within LLMs. We evaluate the performance of MTMT under different parameter configurations, using GPT-4o mini as the base model. Our results demonstrate that integrating multiple modes of thinking significantly enhances the ability of LLMs to handle complex tasks.
Estimating the Direction and Radius of Pipe from GPR Image by Ellipse Inversion Model
Jan 25, 2022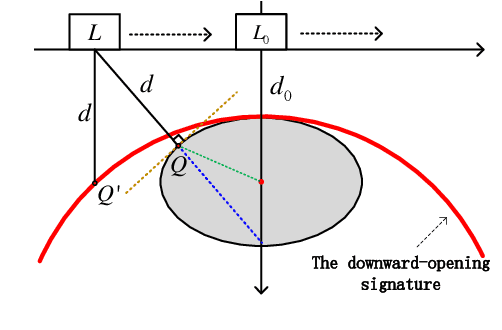
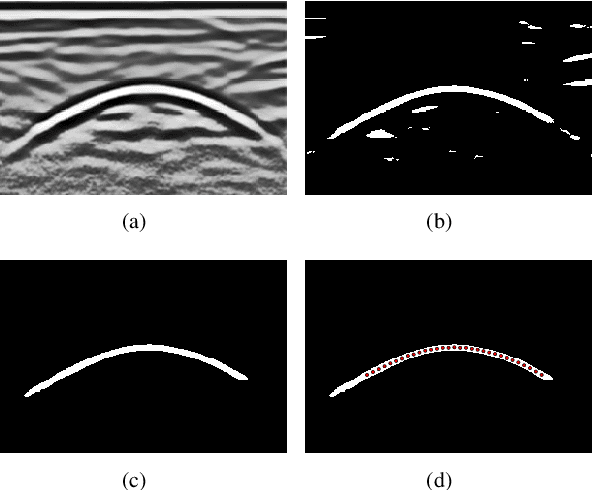
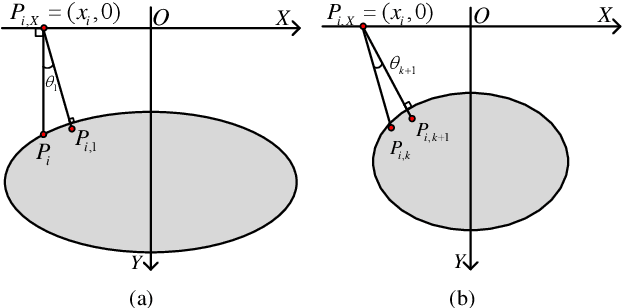
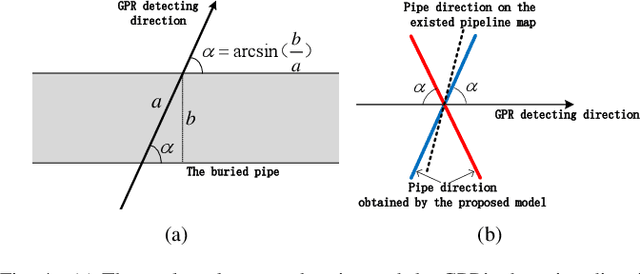
Ground Penetrating Radar (GPR) is widely used as a non-destructive approach to estimate buried utilities. When the GPR's detecting direction is perpendicular to a pipeline, a hyperbolic characteristic would be formed on the GPR B-scan image. However, in real-world applications, the direction of pipelines on the existing pipeline map could be inaccurate, and it is hard to ensure the moving direction of GPR to be actually perpendicular to underground pipelines. In this paper, a novel model is proposed to estimate the direction and radius of pipeline and revise the existing pipeline map from GPR B-scan images. The model consists of two parts: GPR B-scan image processing and Ellipse Iterative Inversion Algorithm (EIIA). Firstly, the GPR B-scan image is processed with downward-opening point set extracted. The obtained point set is then iteratively inverted to the elliptical cross section of the buried pipeline, which is caused by the angle between the GPR's detecting direction and the pipeline's direction. By minimizing the sum of the algebraic distances from the extracted point set to the inverted ellipse, the most likely pipeline's direction and radius are determined. Experiments on real-world datasets are conducted, and the results demonstrate the effectiveness of the method.
Mapping the Buried Cable by Ground Penetrating Radar and Gaussian-Process Regression
Jan 25, 2022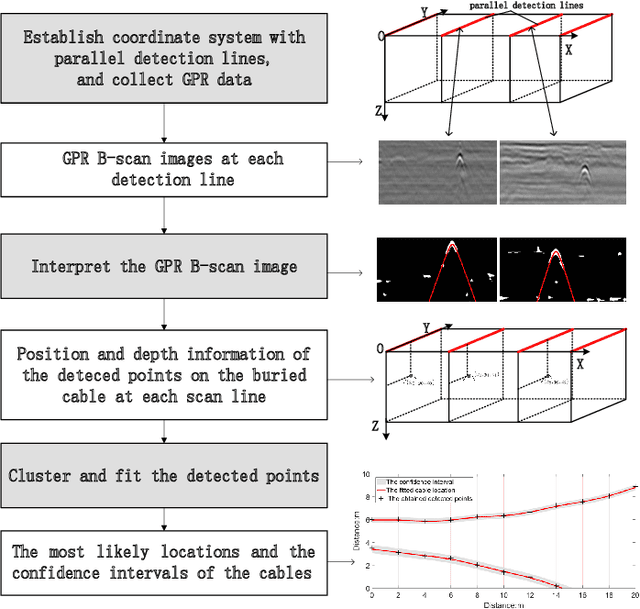
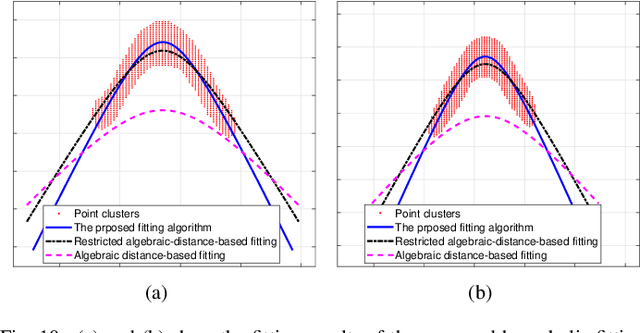
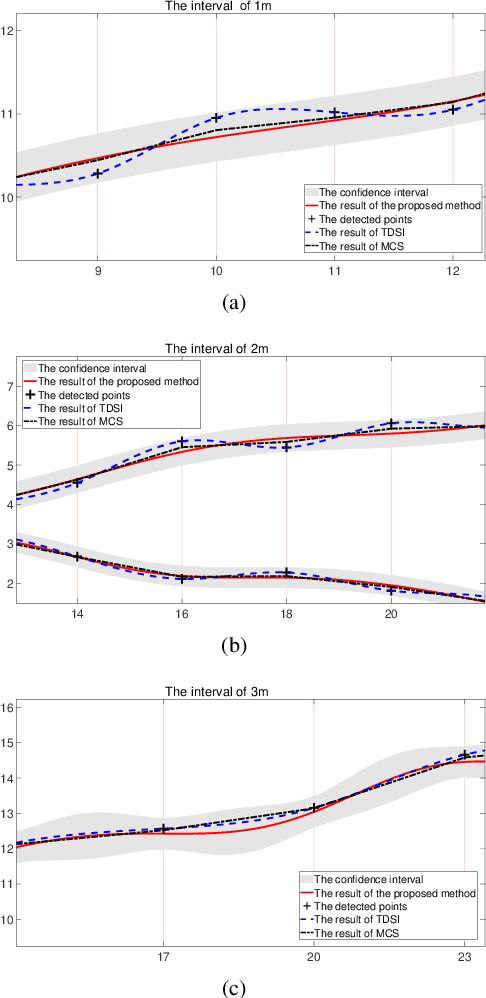
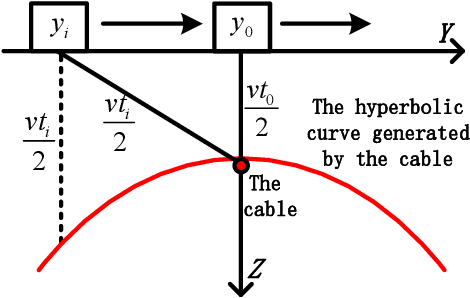
With the rapid expansion of urban areas and the increasingly use of electricity, the need for locating buried cables is becoming urgent. In this paper, a noval method to locate underground cables based on Ground Penetrating Radar (GPR) and Gaussian-process regression is proposed. Firstly, the coordinate system of the detected area is conducted, and the input and output of locating buried cables are determined. The GPR is moved along the established parallel detection lines, and the hyperbolic signatures generated by buried cables are identified and fitted, thus the positions and depths of some points on the cable could be derived. On the basis of the established coordinate system and the derived points on the cable, the clustering method and cable fitting algorithm based on Gaussian-process regression are proposed to find the most likely locations of the underground cables. Furthermore, the confidence intervals of the cable's locations are also obtained. Both the position and depth noises are taken into account in our method, ensuring the robustness and feasibility in different environments and equipments. Experiments on real-world datasets are conducted, and the obtained results demonstrate the effectiveness of the proposed method.
Do Models Learn the Directionality of Relations? A New Evaluation Task: Relation Direction Recognition
May 19, 2021

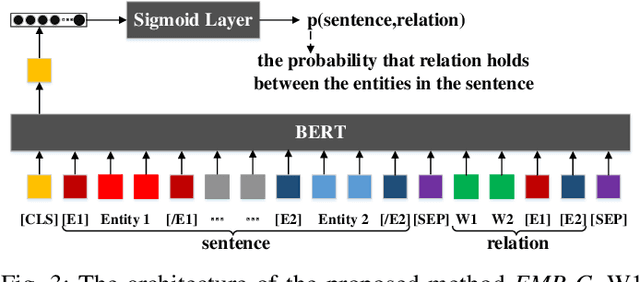
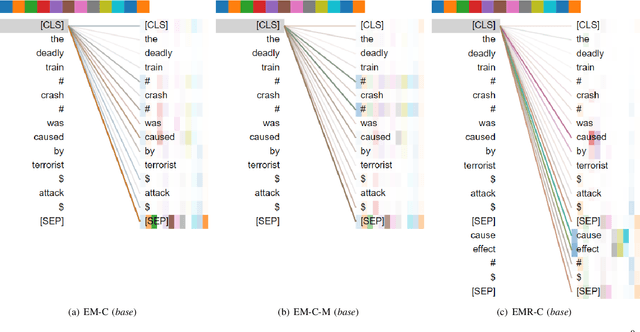
Deep neural networks such as BERT have made great progress in relation classification. Although they can achieve good performance, it is still a question of concern whether these models recognize the directionality of relations, especially when they may lack interpretability. To explore the question, a novel evaluation task, called Relation Direction Recognition (RDR), is proposed to explore whether models learn the directionality of relations. Three metrics for RDR are introduced to measure the degree to which models recognize the directionality of relations. Several state-of-the-art models are evaluated on RDR. Experimental results on a real-world dataset indicate that there are clear gaps among them in recognizing the directionality of relations, even though these models obtain similar performance in the traditional metric (e.g. Macro-F1). Finally, some suggestions are discussed to enhance models to recognize the directionality of relations from the perspective of model design or training.