 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotics Under Construction: Challenges on Job Sites
Jun 24, 2025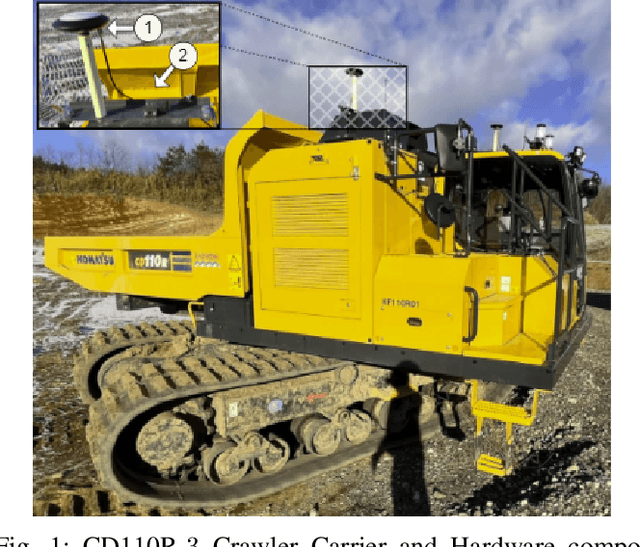
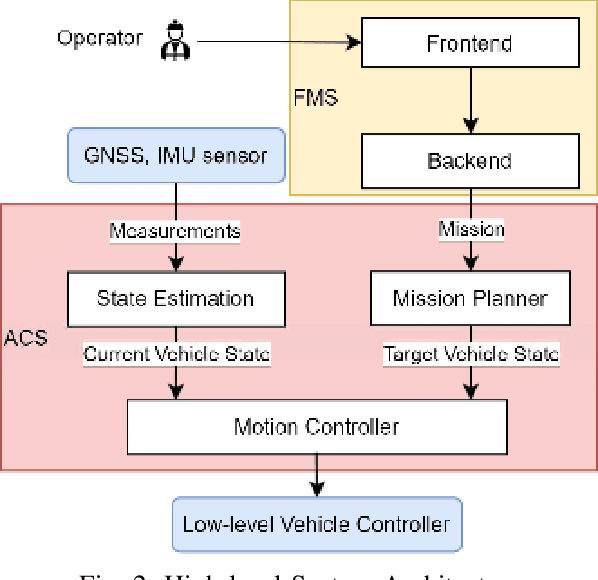
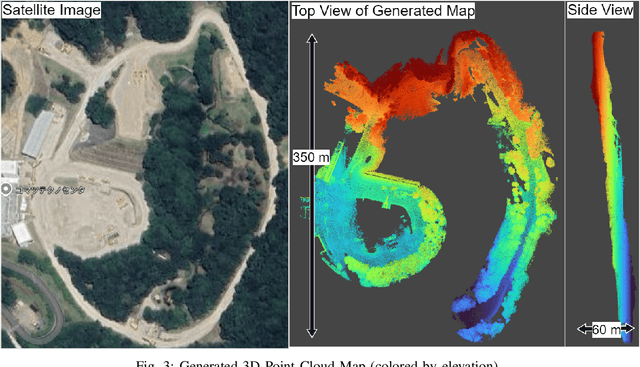
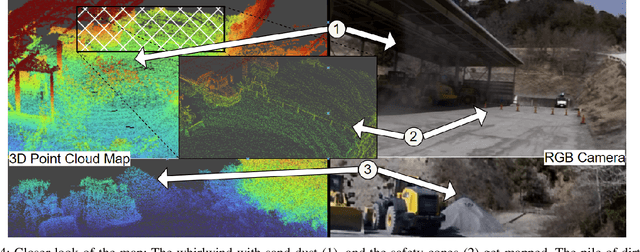
As labor shortages and productivity stagnation increasingly challenge the construction industry, automation has become essential for sustainable infrastructure development. This paper presents an autonomous payload transportation system as an initial step toward fully unmanned construction sites. Our system, based on the CD110R-3 crawler carrier, integrates autonomous navigation, fleet management, and GNSS-based localization to facilitate material transport in construction site environments. While the current system does not yet incorporate dynamic environment adaptation algorithms, we have begun fundamental investigations into external-sensor based perception and mapping system. Preliminary results highlight the potential challenges, including navigation in evolving terrain, environmental perception under construction-specific conditions, and sensor placement optimization for improving autonomy and efficiency. Looking forward, we envision a construction ecosystem where collaborative autonomous agents dynamically adapt to site conditions, optimizing workflow and reducing human intervention. This paper provides foundational insights into the future of robotics-driven construction automation and identifies critical areas for further technological development.
Technical Report for ICRA 2025 GOOSE 3D Semantic Segmentation Challenge: Adaptive Point Cloud Understanding for Heterogeneous Robotic Systems
Jun 08, 2025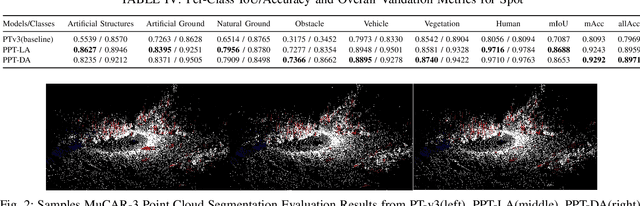
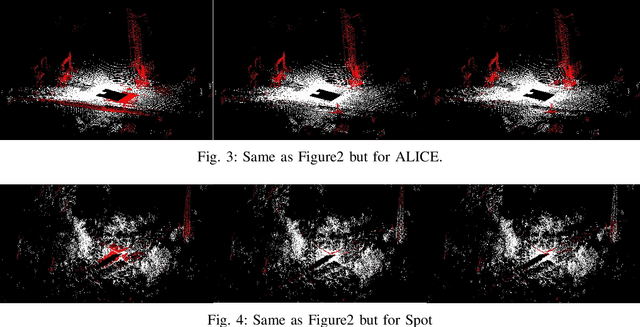
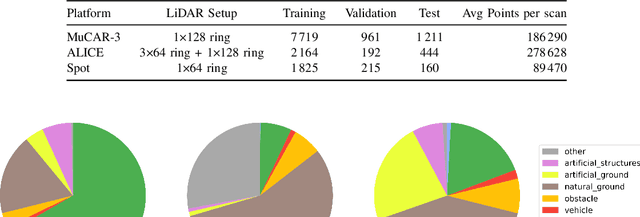
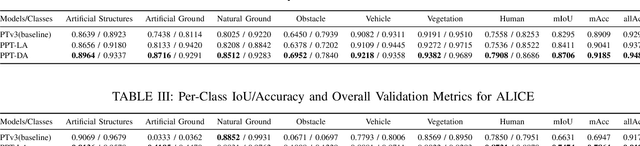
This technical report presents the implementation details of the winning solution for the ICRA 2025 GOOSE 3D Semantic Segmentation Challenge. This challenge focuses on semantic segmentation of 3D point clouds from diverse unstructured outdoor environments collected from multiple robotic platforms. This problem was addressed by implementing Point Prompt Tuning (PPT) integrated with Point Transformer v3 (PTv3) backbone, enabling adaptive processing of heterogeneous LiDAR data through platform-specific conditioning and cross-dataset class alignment strategies. The model is trained without requiring additional external data. As a result, this approach achieved substantial performance improvements with mIoU increases of up to 22.59% on challenging platforms compared to the baseline PTv3 model, demonstrating the effectiveness of adaptive point cloud understanding for field robotics applications.
MMHCL: Multi-Modal Hypergraph Contrastive Learning for Recommendation
Apr 23, 2025The burgeoning presence of multimodal content-sharing platforms propels the development of personalized recommender systems. Previous works usually suffer from data sparsity and cold-start problems, and may fail to adequately explore semantic user-product associations from multimodal data. To address these issues, we propose a novel Multi-Modal Hypergraph Contrastive Learning (MMHCL) framework for user recommendation. For a comprehensive information exploration from user-product relations, we construct two hypergraphs, i.e. a user-to-user (u2u) hypergraph and an item-to-item (i2i) hypergraph, to mine shared preferences among users and intricate multimodal semantic resemblance among items, respectively. This process yields denser second-order semantics that are fused with first-order user-item interaction as complementary to alleviate the data sparsity issue. Then, we design a contrastive feature enhancement paradigm by applying synergistic contrastive learning. By maximizing/minimizing the mutual information between second-order (e.g. shared preference pattern for users) and first-order (information of selected items for users) embeddings of the same/different users and items, the feature distinguishability can be effectively enhanced. Compared with using sparse primary user-item interaction only, our MMHCL obtains denser second-order hypergraphs and excavates more abundant shared attributes to explore the user-product associations, which to a certain extent alleviates the problems of data sparsity and cold-start. Extensive experiments have comprehensively demonstrated the effectiveness of our method. Our code is publicly available at: https://github.com/Xu107/MMHCL.
Multi-Modal Hypergraph Enhanced LLM Learning for Recommendation
Apr 13, 2025



The burgeoning presence of Large Language Models (LLM) is propelling the development of personalized recommender systems. Most existing LLM-based methods fail to sufficiently explore the multi-view graph structure correlations inherent in recommendation scenarios. To this end, we propose a novel framework, Hypergraph Enhanced LLM Learning for multimodal Recommendation (HeLLM), designed to equip LLMs with the capability to capture intricate higher-order semantic correlations by fusing graph-level contextual signals with sequence-level behavioral patterns. In the recommender pre-training phase, we design a user hypergraph to uncover shared interest preferences among users and an item hypergraph to capture correlations within multimodal similarities among items. The hypergraph convolution and synergistic contrastive learning mechanism are introduced to enhance the distinguishability of learned representations. In the LLM fine-tuning phase, we inject the learned graph-structured embeddings directly into the LLM's architecture and integrate sequential features capturing each user's chronological behavior. This process enables hypergraphs to leverage graph-structured information as global context, enhancing the LLM's ability to perceive complex relational patterns and integrate multimodal information, while also modeling local temporal dynamics. Extensive experiments demonstrate the superiority of our proposed method over state-of-the-art baselines, confirming the advantages of fusing hypergraph-based context with sequential user behavior in LLMs for recommendation.
Re-Attentional Controllable Video Diffusion Editing
Dec 16, 2024Editing videos with textual guidance has garnered popularity due to its streamlined process which mandates users to solely edit the text prompt corresponding to the source video. Recent studies have explored and exploited large-scale text-to-image diffusion models for text-guided video editing, resulting in remarkable video editing capabilities. However, they may still suffer from some limitations such as mislocated objects, incorrect number of objects. Therefore, the controllability of video editing remains a formidable challenge. In this paper, we aim to challenge the above limitations by proposing a Re-Attentional Controllable Video Diffusion Editing (ReAtCo) method. Specially, to align the spatial placement of the target objects with the edited text prompt in a training-free manner, we propose a Re-Attentional Diffusion (RAD) to refocus the cross-attention activation responses between the edited text prompt and the target video during the denoising stage, resulting in a spatially location-aligned and semantically high-fidelity manipulated video. In particular, to faithfully preserve the invariant region content with less border artifacts, we propose an Invariant Region-guided Joint Sampling (IRJS) strategy to mitigate the intrinsic sampling errors w.r.t the invariant regions at each denoising timestep and constrain the generated content to be harmonized with the invariant region content. Experimental results verify that ReAtCo consistently improves the controllability of video diffusion editing and achieves superior video editing performance.
Benchmarking the Physical-world Adversarial Robustness of Vehicle Detection
Apr 11, 2023



Adversarial attacks in the physical world can harm the robustness of detection models. Evaluating the robustness of detection models in the physical world can be challenging due to the time-consuming and labor-intensive nature of many experiments. Thus, virtual simulation experiments can provide a solution to this challenge. However, there is no unified detection benchmark based on virtual simulation environment. To address this challenge, we proposed an instant-level data generation pipeline based on the CARLA simulator. Using this pipeline, we generated the DCI dataset and conducted extensive experiments on three detection models and three physical adversarial attacks. The dataset covers 7 continuous and 1 discrete scenes, with over 40 angles, 20 distances, and 20,000 positions. The results indicate that Yolo v6 had strongest resistance, with only a 6.59% average AP drop, and ASA was the most effective attack algorithm with a 14.51% average AP reduction, twice that of other algorithms. Static scenes had higher recognition AP, and results under different weather conditions were similar. Adversarial attack algorithm improvement may be approaching its 'limitation'.
Robust Regression with Highly Corrupted Data via Physics Informed Neural Networks
Oct 19, 2022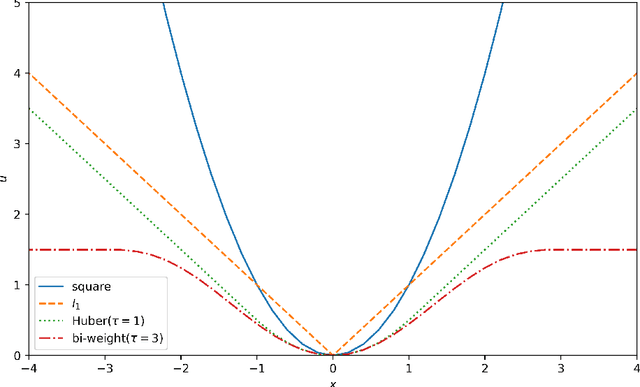
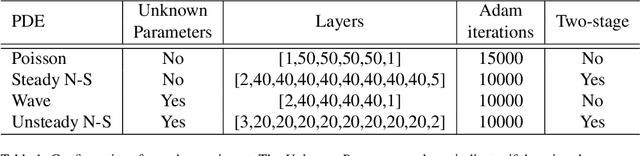
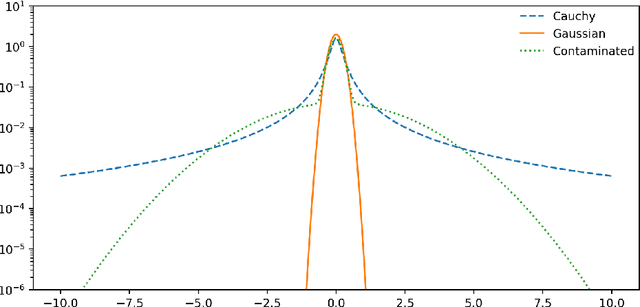
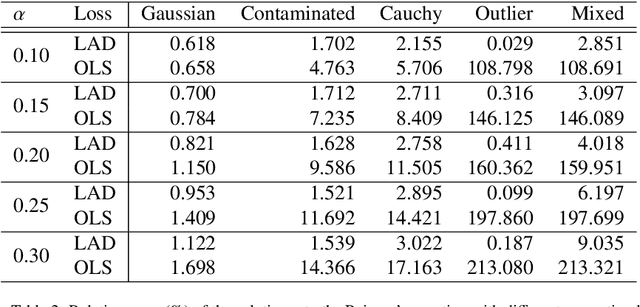
Physics-informed neural networks (PINNs) have been proposed to solve two main classes of problems: data-driven solutions and data-driven discovery of partial differential equations. This task becomes prohibitive when such data is highly corrupted due to the possible sensor mechanism failing. We propose the Least Absolute Deviation based PINN (LAD-PINN) to reconstruct the solution and recover unknown parameters in PDEs - even if spurious data or outliers corrupt a large percentage of the observations. To further improve the accuracy of recovering hidden physics, the two-stage Median Absolute Deviation based PINN (MAD-PINN) is proposed, where LAD-PINN is employed as an outlier detector followed by MAD screening out the highly corrupted data. Then the vanilla PINN or its variants can be subsequently applied to exploit the remaining normal data. Through several examples, including Poisson's equation, wave equation, and steady or unsteady Navier-Stokes equations, we illustrate the generalizability, accuracy and efficiency of the proposed algorithms for recovering governing equations from noisy and highly corrupted measurement data.
OA-Bug: An Olfactory-Auditory Augmented Bug Algorithm for Swarm Robots in a Denied Environment
Sep 28, 2022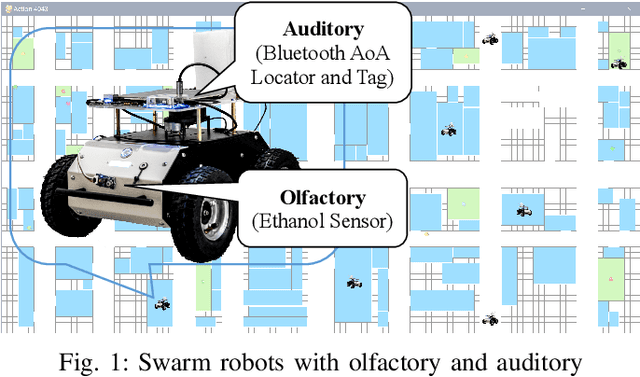
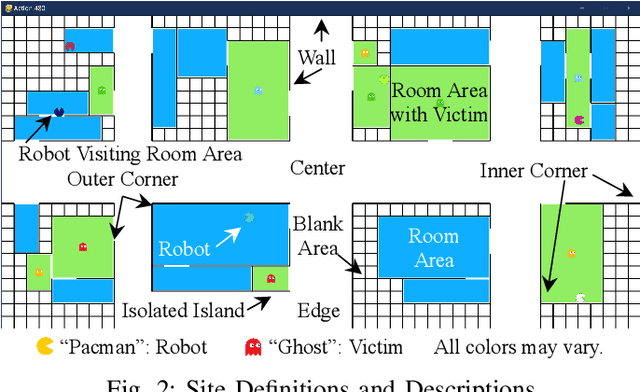

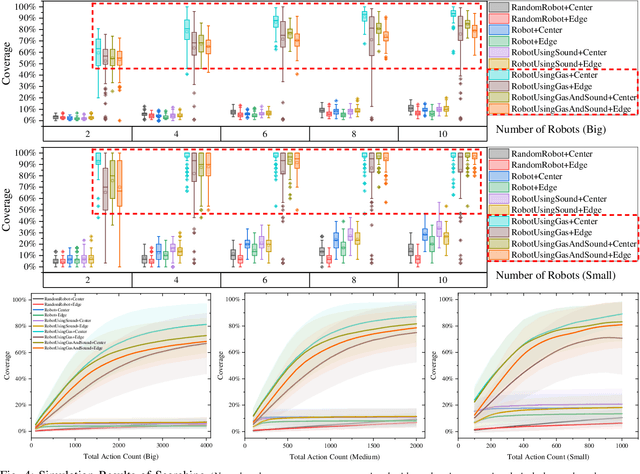
Searching in a denied environment is challenging for swarm robots as no assistance from GNSS, mapping, data sharing, and central processing are allowed. However, using olfactory and auditory to cooperate like animals could be an important way to improve the collaboration of swarm robots. In this paper, an Olfactory-Auditory augmented Bug algorithm (OA-Bug) is proposed for a swarm of autonomous robots to explore a denied environment. A simulation environment is built to measure the performance of OA-Bug. The coverage of the search task using OA-Bug can reach 96.93%, with the most significant improvement of 40.55% compared with a similar algorithm, SGBA. Furthermore, experiments are conducted on real swarm robots to prove the validity of OA-Bug. Results show that OA-Bug can improve the performance of swarm robots in a denied environment.
Heat Source Layout Optimization Using Automatic Deep Learning Surrogate Model and Multimodal Neighborhood Search Algorithm
May 16, 2022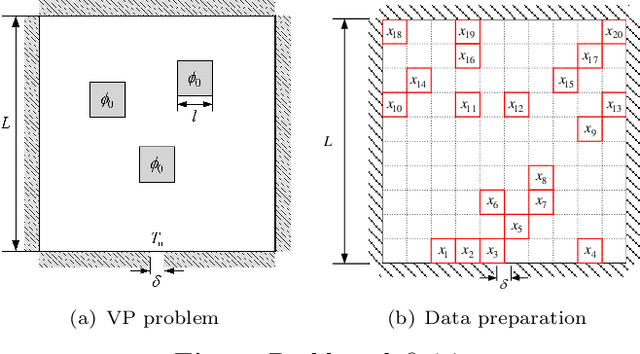

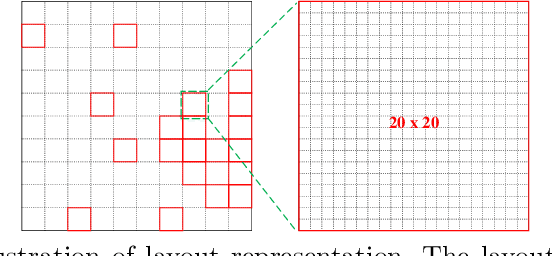
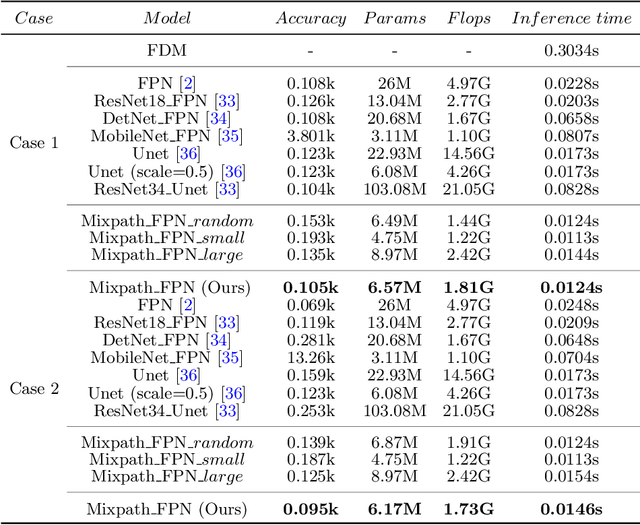
In satellite layout design, heat source layout optimization (HSLO) is an effective technique to decrease the maximum temperature and improve the heat management of the whole system. Recently, deep learning surrogate assisted HSLO has been proposed, which learns the mapping from layout to its corresponding temperature field, so as to substitute the simulation during optimization to decrease the computational cost largely. However, it faces two main challenges: 1) the neural network surrogate for the certain task is often manually designed to be complex and requires rich debugging experience, which is challenging for the designers in the engineering field; 2) existing algorithms for HSLO could only obtain a near optimal solution in single optimization and are easily trapped in local optimum. To address the first challenge, considering reducing the total parameter numbers and ensuring the similar accuracy as well as, a neural architecture search (NAS) method combined with Feature Pyramid Network (FPN) framework is developed to realize the purpose of automatically searching for a small deep learning surrogate model for HSLO. To address the second challenge, a multimodal neighborhood search based layout optimization algorithm (MNSLO) is proposed, which could obtain more and better approximate optimal design schemes simultaneously in single optimization. Finally, two typical two-dimensional heat conduction optimization problems are utilized to demonstrate the effectiveness of the proposed method. With the similar accuracy, NAS finds models with 80% fewer parameters, 64% fewer FLOPs and 36% faster inference time than the original FPN. Besides, with the assistance of deep learning surrogate by automatic search, MNSLO could achieve multiple near optimal design schemes simultaneously to provide more design diversities for designers.
RANG: A Residual-based Adaptive Node Generation Method for Physics-Informed Neural Networks
May 12, 2022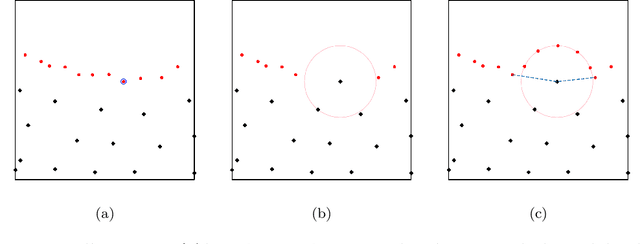
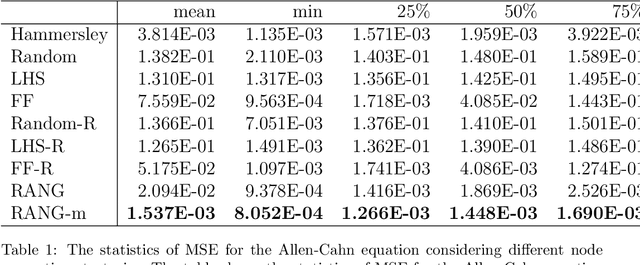
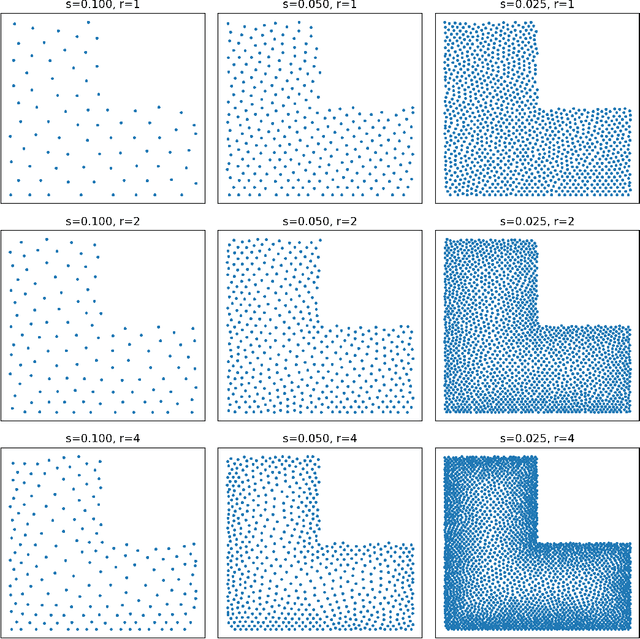
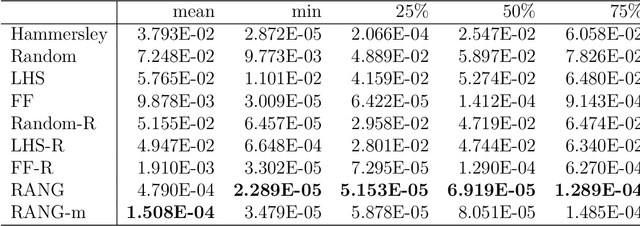
Learning solutions of partial differential equations (PDEs) with Physics-Informed Neural Networks (PINNs) is an attractive alternative approach to traditional solvers due to its flexibility and ease of incorporating observed data. Despite the success of PINNs in accurately solving a wide variety of PDEs, the method still requires improvements in terms of computational efficiency. One possible improvement idea is to optimize the generation of training point sets. Residual-based adaptive sampling and quasi-uniform sampling approaches have been each applied to improve the training effects of PINNs, respectively. To benefit from both methods, we propose the Residual-based Adaptive Node Generation (RANG) approach for efficient training of PINNs, which is based on a variable density nodal distribution method for RBF-FD. The method is also enhanced by a memory mechanism to further improve training stability. We conduct experiments on three linear PDEs and three nonlinear PDEs with various node generation methods, through which the accuracy and efficiency of the proposed method compared to the predominant uniform sampling approach is verified numerically.