 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOA-Bug: An Olfactory-Auditory Augmented Bug Algorithm for Swarm Robots in a Denied Environment
Sep 28, 2022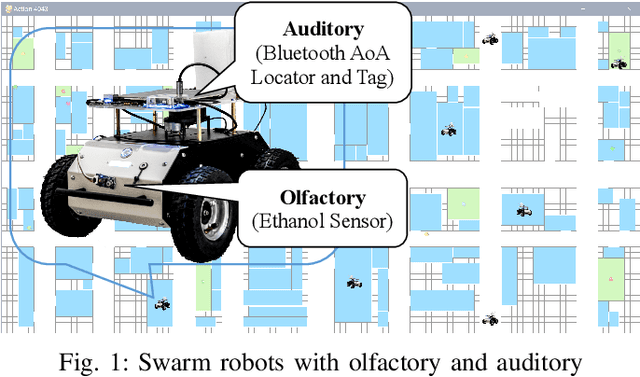

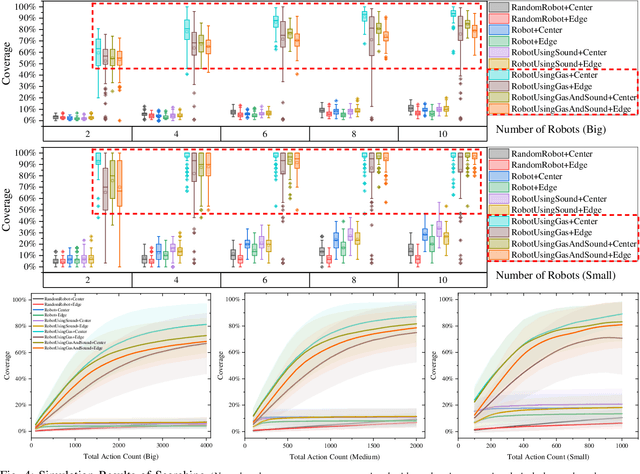
Searching in a denied environment is challenging for swarm robots as no assistance from GNSS, mapping, data sharing, and central processing are allowed. However, using olfactory and auditory to cooperate like animals could be an important way to improve the collaboration of swarm robots. In this paper, an Olfactory-Auditory augmented Bug algorithm (OA-Bug) is proposed for a swarm of autonomous robots to explore a denied environment. A simulation environment is built to measure the performance of OA-Bug. The coverage of the search task using OA-Bug can reach 96.93%, with the most significant improvement of 40.55% compared with a similar algorithm, SGBA. Furthermore, experiments are conducted on real swarm robots to prove the validity of OA-Bug. Results show that OA-Bug can improve the performance of swarm robots in a denied environment.