 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGARF: Learning Generalizable 3D Reassembly for Real-World Fractures
Apr 07, 20253D reassembly is a challenging spatial intelligence task with broad applications across scientific domains. While large-scale synthetic datasets have fueled promising learning-based approaches, their generalizability to different domains is limited. Critically, it remains uncertain whether models trained on synthetic datasets can generalize to real-world fractures where breakage patterns are more complex. To bridge this gap, we propose GARF, a generalizable 3D reassembly framework for real-world fractures. GARF leverages fracture-aware pretraining to learn fracture features from individual fragments, with flow matching enabling precise 6-DoF alignments. At inference time, we introduce one-step preassembly, improving robustness to unseen objects and varying numbers of fractures. In collaboration with archaeologists, paleoanthropologists, and ornithologists, we curate Fractura, a diverse dataset for vision and learning communities, featuring real-world fracture types across ceramics, bones, eggshells, and lithics. Comprehensive experiments have shown our approach consistently outperforms state-of-the-art methods on both synthetic and real-world datasets, achieving 82.87\% lower rotation error and 25.15\% higher part accuracy. This sheds light on training on synthetic data to advance real-world 3D puzzle solving, demonstrating its strong generalization across unseen object shapes and diverse fracture types.
Unleashing the Power of Data Synthesis in Visual Localization
Nov 28, 2024



Visual localization, which estimates a camera's pose within a known scene, is a long-standing challenge in vision and robotics. Recent end-to-end methods that directly regress camera poses from query images have gained attention for fast inference. However, existing methods often struggle to generalize to unseen views. In this work, we aim to unleash the power of data synthesis to promote the generalizability of pose regression. Specifically, we lift real 2D images into 3D Gaussian Splats with varying appearance and deblurring abilities, which are then used as a data engine to synthesize more posed images. To fully leverage the synthetic data, we build a two-branch joint training pipeline, with an adversarial discriminator to bridge the syn-to-real gap. Experiments on established benchmarks show that our method outperforms state-of-the-art end-to-end approaches, reducing translation and rotation errors by 50% and 21.6% on indoor datasets, and 35.56% and 38.7% on outdoor datasets. We also validate the effectiveness of our method in dynamic driving scenarios under varying weather conditions. Notably, as data synthesis scales up, our method exhibits a growing ability to interpolate and extrapolate training data for localizing unseen views. Project Page: https://ai4ce.github.io/RAP/
FusionSense: Bridging Common Sense, Vision, and Touch for Robust Sparse-View Reconstruction
Oct 10, 2024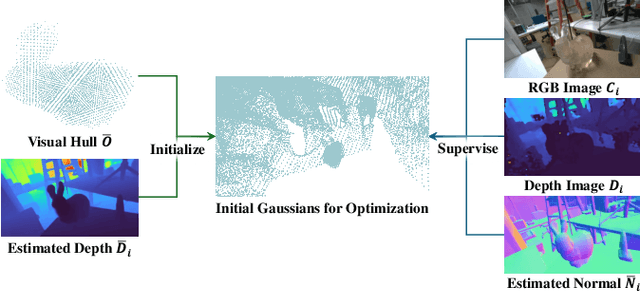
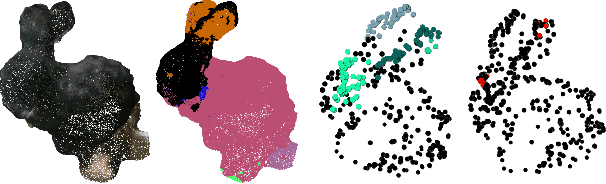
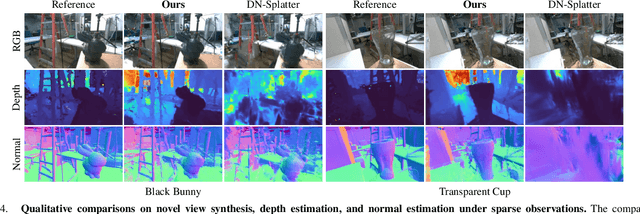
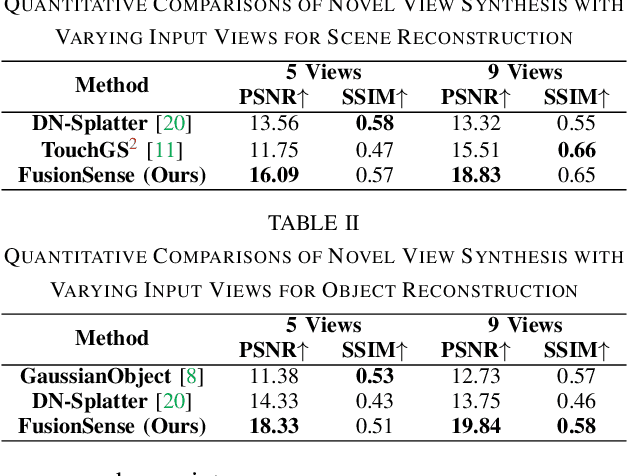
Humans effortlessly integrate common-sense knowledge with sensory input from vision and touch to understand their surroundings. Emulating this capability, we introduce FusionSense, a novel 3D reconstruction framework that enables robots to fuse priors from foundation models with highly sparse observations from vision and tactile sensors. FusionSense addresses three key challenges: (i) How can robots efficiently acquire robust global shape information about the surrounding scene and objects? (ii) How can robots strategically select touch points on the object using geometric and common-sense priors? (iii) How can partial observations such as tactile signals improve the overall representation of the object? Our framework employs 3D Gaussian Splatting as a core representation and incorporates a hierarchical optimization strategy involving global structure construction, object visual hull pruning and local geometric constraints. This advancement results in fast and robust perception in environments with traditionally challenging objects that are transparent, reflective, or dark, enabling more downstream manipulation or navigation tasks. Experiments on real-world data suggest that our framework outperforms previously state-of-the-art sparse-view methods. All code and data are open-sourced on the project website.
OA-Bug: An Olfactory-Auditory Augmented Bug Algorithm for Swarm Robots in a Denied Environment
Sep 28, 2022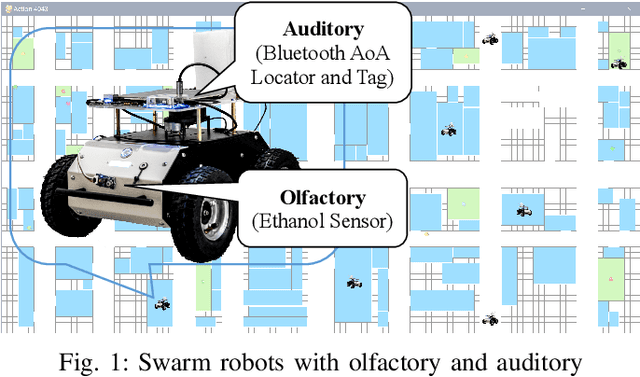
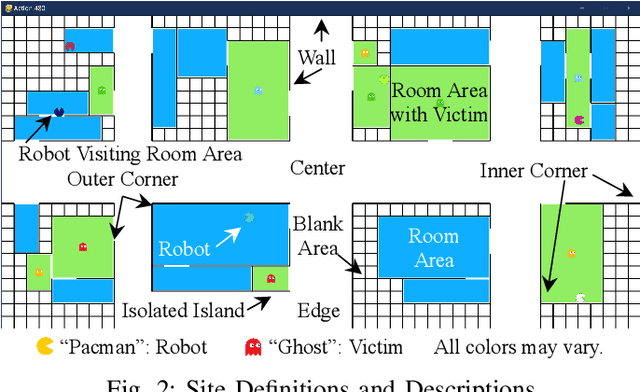

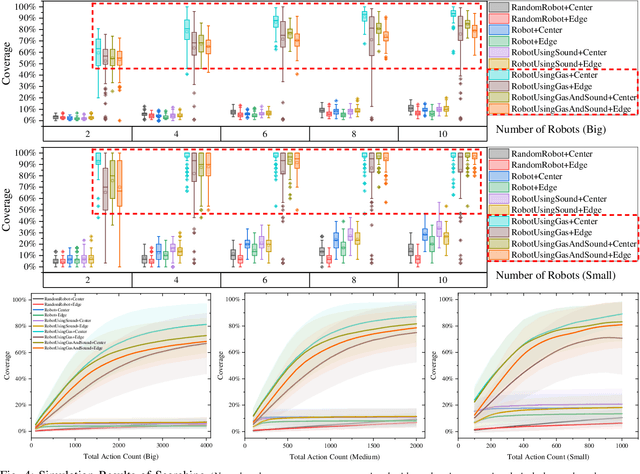
Searching in a denied environment is challenging for swarm robots as no assistance from GNSS, mapping, data sharing, and central processing are allowed. However, using olfactory and auditory to cooperate like animals could be an important way to improve the collaboration of swarm robots. In this paper, an Olfactory-Auditory augmented Bug algorithm (OA-Bug) is proposed for a swarm of autonomous robots to explore a denied environment. A simulation environment is built to measure the performance of OA-Bug. The coverage of the search task using OA-Bug can reach 96.93%, with the most significant improvement of 40.55% compared with a similar algorithm, SGBA. Furthermore, experiments are conducted on real swarm robots to prove the validity of OA-Bug. Results show that OA-Bug can improve the performance of swarm robots in a denied environment.