 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModulation Symbol Pulse Shaping Transceiver for Affine Frequency Division Multiplexing
Mar 18, 2026The recently proposed affine frequency division multiplexing (AFDM) waveform can adjust the time-frequency diversity gain by tuning chirp-rate parameter. Therefore, it is a candidate waveform in doubly-selective channels. This letter reveals that the modulation-symbol-domain shaping pulse of AFDM is generated by a convolution-like operation between the time-domain and frequency-domain shaping pulses, indicating that the modulation-symbol-domain pulse shaping of AFDM can be achieved by separately shaping in the time domain and frequency domain. Based on this, this letter presents an AFDM modulation-symbol-domain pulse shaping transceiver which has an ability to achieve the Nyquist pulse shaping, and provides the corresponding input-output relationship. Numerical results demonstrate the effectiveness of the proposed transceiver in improving the channel sparsity and pilot-to-data interference.
Relative Localization of UAV Swarms in GNSS-Denied Conditions
Sep 04, 2025Relative localization of unmanned aerial vehicle (UAV) swarms in global navigation satellite system (GNSS) denied environments is essential for emergency rescue and battlefield reconnaissance. Existing methods suffer from significant localization errors among UAVs due to packet loss and high computational complexity in large swarms. This paper proposes a clustering-based framework where the UAVs simultaneously use communication signals for channel estimation and ranging. Firstly, the spectral clustering is utilized to divide the UAV swarm into different sub-clusters, where matrix completion and multidimensional scaling yield high-precision relative coordinates. Subsequently, a global map is created by the inter-cluster anchor fusion. A case study of UAV integrated communication and sensing (ISAC) system is presented, where the Orthogonal Time Frequency Space (OTFS) is adopted for ranging and communication. Experimental results show that the proposed method reduces localization errors in large swarms and loss of range information. It also explores the impact of signal parameters on communication and localization, highlighting the interplay between communication and localization performance.
Multimodal Large Language Models-Enabled UAV Swarm: Towards Efficient and Intelligent Autonomous Aerial Systems
Jun 15, 2025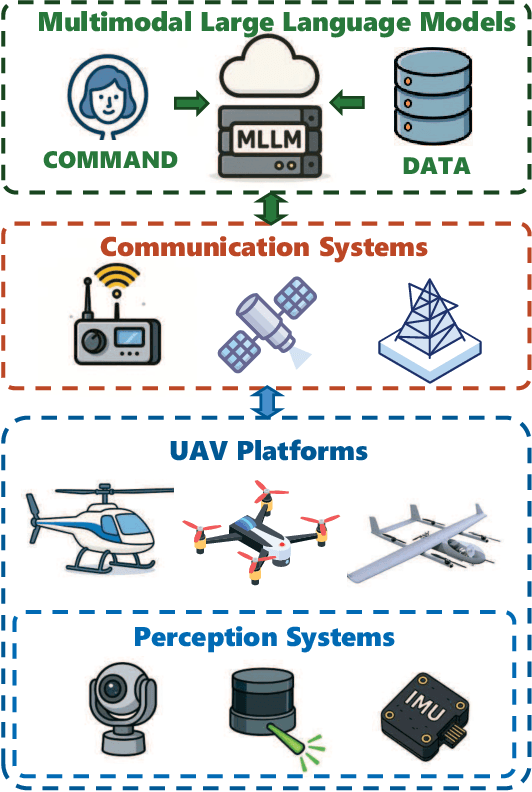
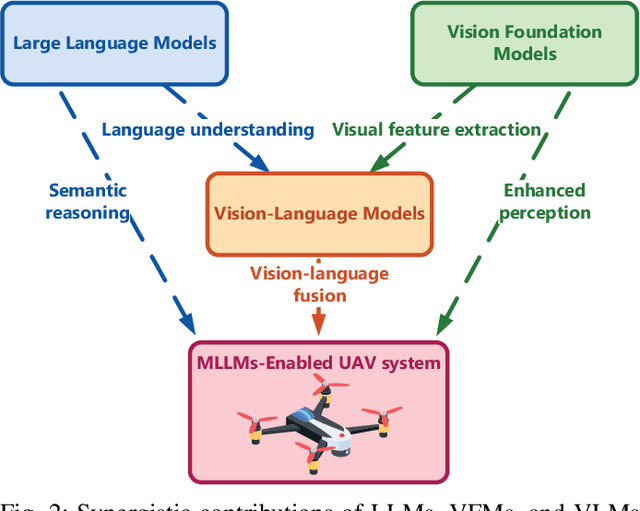
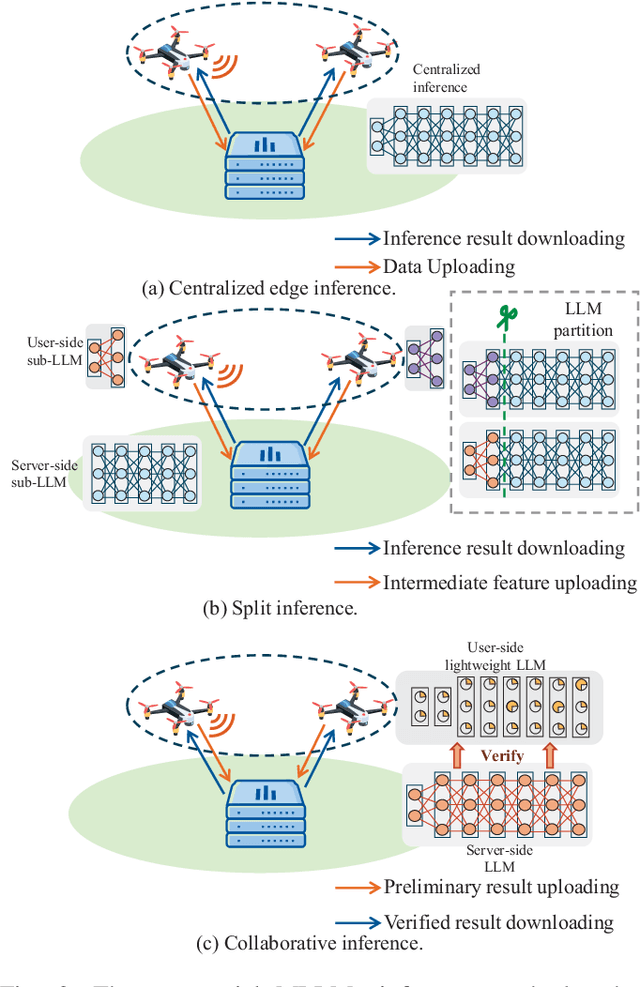
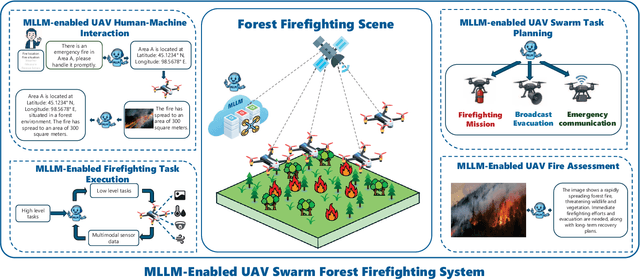
Recent breakthroughs in multimodal large language models (MLLMs) have endowed AI systems with unified perception, reasoning and natural-language interaction across text, image and video streams. Meanwhile, Unmanned Aerial Vehicle (UAV) swarms are increasingly deployed in dynamic, safety-critical missions that demand rapid situational understanding and autonomous adaptation. This paper explores potential solutions for integrating MLLMs with UAV swarms to enhance the intelligence and adaptability across diverse tasks. Specifically, we first outline the fundamental architectures and functions of UAVs and MLLMs. Then, we analyze how MLLMs can enhance the UAV system performance in terms of target detection, autonomous navigation, and multi-agent coordination, while exploring solutions for integrating MLLMs into UAV systems. Next, we propose a practical case study focused on the forest fire fighting. To fully reveal the capabilities of the proposed framework, human-machine interaction, swarm task planning, fire assessment, and task execution are investigated. Finally, we discuss the challenges and future research directions for the MLLMs-enabled UAV swarm. An experiment illustration video could be found online at https://youtu.be/zwnB9ZSa5A4.
Seed1.5-VL Technical Report
May 11, 2025



We present Seed1.5-VL, a vision-language foundation model designed to advance general-purpose multimodal understanding and reasoning. Seed1.5-VL is composed with a 532M-parameter vision encoder and a Mixture-of-Experts (MoE) LLM of 20B active parameters. Despite its relatively compact architecture, it delivers strong performance across a wide spectrum of public VLM benchmarks and internal evaluation suites, achieving the state-of-the-art performance on 38 out of 60 public benchmarks. Moreover, in agent-centric tasks such as GUI control and gameplay, Seed1.5-VL outperforms leading multimodal systems, including OpenAI CUA and Claude 3.7. Beyond visual and video understanding, it also demonstrates strong reasoning abilities, making it particularly effective for multimodal reasoning challenges such as visual puzzles. We believe these capabilities will empower broader applications across diverse tasks. In this report, we mainly provide a comprehensive review of our experiences in building Seed1.5-VL across model design, data construction, and training at various stages, hoping that this report can inspire further research. Seed1.5-VL is now accessible at https://www.volcengine.com/ (Volcano Engine Model ID: doubao-1-5-thinking-vision-pro-250428)
A Survey on Wi-Fi Sensing Generalizability: Taxonomy, Techniques, Datasets, and Future Research Prospects
Mar 11, 2025Wi-Fi sensing has emerged as a transformative technology that leverages ubiquitous wireless signals to enable a variety of applications ranging from activity and gesture recognition to indoor localization and health monitoring. However, the inherent dependency of Wi-Fi signals on environmental conditions introduces significant generalization challenges,variations in surroundings, human positions, and orientations often lead to inconsistent signal features, impeding robust action recognition. In this survey, we review over 200 studies on Wi-Fi sensing generalization, categorizing them along the entire sensing pipeline: device deployment, signal processing, feature learning, and model deployment. We systematically analyze state-of-the-art techniques, which are employed to mitigate the adverse effects of environmental variability. Moreover, we provide a comprehensive overview of open-source datasets such as Widar3.0, XRF55, and XRFv2, highlighting their unique characteristics and applicability for multimodal fusion and cross-modal tasks. Finally, we discuss emerging research directions, such as multimodal approaches and the integration of large language models,to inspire future advancements in this rapidly evolving field. Our survey aims to serve as a valuable resource for researchers, offering insights into current methodologies, available datasets, and promising avenues for further investigation.
Confidence Based Asynchronous Integrated Communication and Localization Networks Using Pulsed UWB Signals
Mar 02, 2025



In recent years, UWB has garnered widespread attention in academia and industry due to its low power consumption, wide bandwidth, and high time resolution characteristics. This paper introduces the design of an asynchronous IR-UWB integrated communication and localization (ICL) downlink network, which employs unified waveforms to enable simultaneous data transmission and localization. A differential sequential detection strategy has been proposed for data demodulation. To address errors caused by symbol misalignment, a novel symbol confidence metric model is introduced to ensure reliable pulse detection and time-of-arrival (TOA) estimation. Additionally, an asynchronous start-of-frame delimiter (SFD) detection model has been constructed to guide parameter optimization for practical applications. Furthermore, the clock drift estimation has been improved by leveraging the confidence metric within a modified weighted least squares (MWLS) framework. Simulation results demonstrate that the proposed system achieves reliable clock drift estimation, communication, and self-localization simultaneously. The operational range of the confidence metric required for these outcomes is also quantified, providing valuable insights for parameter design and system implementation. Finally, the agent localization accuracy can be achieved within 10 cm at over 90\% confidence, with commercial UWB devices according to practical measurements.
EgoHand: Ego-centric Hand Pose Estimation and Gesture Recognition with Head-mounted Millimeter-wave Radar and IMUs
Jan 23, 2025



Recent advanced Virtual Reality (VR) headsets, such as the Apple Vision Pro, employ bottom-facing cameras to detect hand gestures and inputs, which offers users significant convenience in VR interactions. However, these bottom-facing cameras can sometimes be inconvenient and pose a risk of unintentionally exposing sensitive information, such as private body parts or personal surroundings. To mitigate these issues, we introduce EgoHand. This system provides an alternative solution by integrating millimeter-wave radar and IMUs for hand gesture recognition, thereby offering users an additional option for gesture interaction that enhances privacy protection. To accurately recognize hand gestures, we devise a two-stage skeleton-based gesture recognition scheme. In the first stage, a novel end-to-end Transformer architecture is employed to estimate the coordinates of hand joints. Subsequently, these estimated joint coordinates are utilized for gesture recognition. Extensive experiments involving 10 subjects show that EgoHand can detect hand gestures with 90.8% accuracy. Furthermore, EgoHand demonstrates robust performance across a variety of cross-domain tests, including different users, dominant hands, body postures, and scenes.
Fundamental Limits of Pulse Based UWB ISAC Systems: A Parameter Estimation Perspective
Oct 17, 2024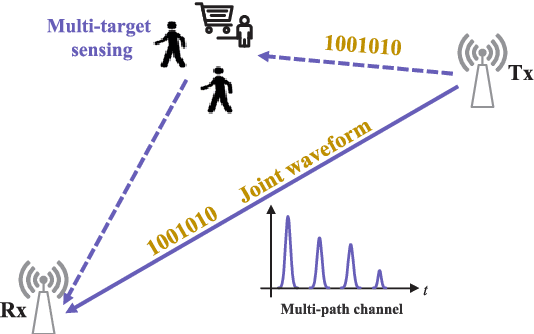
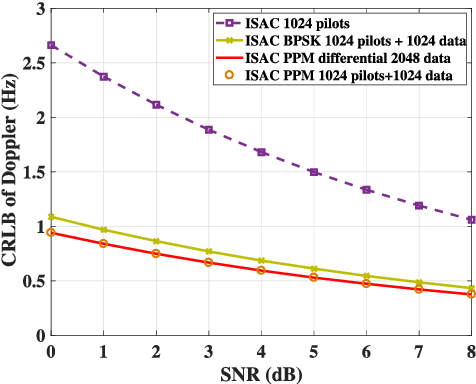
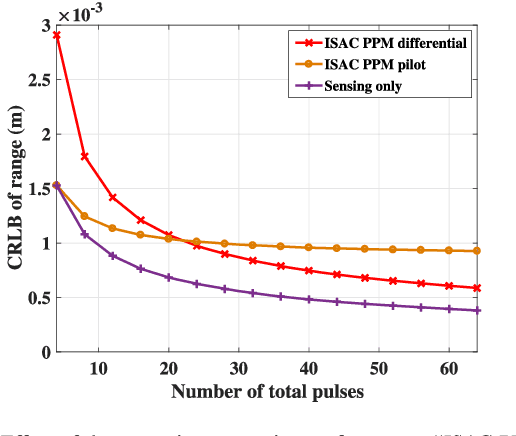
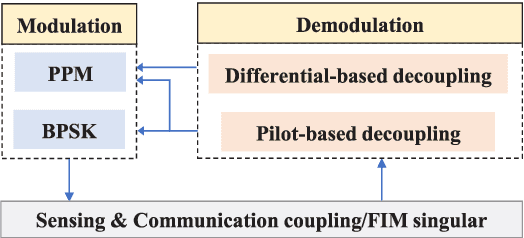
Impulse radio ultra-wideband (IR-UWB) signals stand out for their high temporal resolution, low cost, and large bandwidth, making them a highly promising option for integrated sensing and communication (ISAC) systems. In this paper, we design an ISAC system for a bi-static passive sensing scenario that accommodates multiple targets. Specifically, we introduce two typical modulation schemes, PPM and BPSK, for data transmission. The essential coupling between sensing and communication is examined through the Fisher information matrix (FIM). Accordingly, we introduce a pilot-based decoupling approach that relies on known time-delays, as well as a differential decoupling strategy that uses a known starting symbol position. Finally, we assess the sensing and communication performance under various modulation and demodulation schemes under the constraints of current UWB standards. This assessment utilizes the Cramer-Rao Lower Bound (CRLB) for sensing and the Shannon capacity limit for communication, offering theoretical insights into choosing suitable data signal processing methods in real-world applications.
Continuous-time q-Learning for Jump-Diffusion Models under Tsallis Entropy
Jul 04, 2024This paper studies continuous-time reinforcement learning for controlled jump-diffusion models by featuring the q-function (the continuous-time counterpart of Q-function) and the q-learning algorithms under the Tsallis entropy regularization. Contrary to the conventional Shannon entropy, the general form of Tsallis entropy renders the optimal policy not necessary a Gibbs measure, where some Lagrange multiplier and KKT multiplier naturally arise from certain constraints to ensure the learnt policy to be a probability distribution. As a consequence,the relationship between the optimal policy and the q-function also involves the Lagrange multiplier. In response, we establish the martingale characterization of the q-function under Tsallis entropy and devise two q-learning algorithms depending on whether the Lagrange multiplier can be derived explicitly or not. In the latter case, we need to consider different parameterizations of the q-function and the policy and update them alternatively. Finally, we examine two financial applications, namely an optimal portfolio liquidation problem and a non-LQ control problem. It is interesting to see therein that the optimal policies under the Tsallis entropy regularization can be characterized explicitly, which are distributions concentrate on some compact support. The satisfactory performance of our q-learning algorithm is illustrated in both examples.
Rule-driven News Captioning
Mar 14, 2024News captioning task aims to generate sentences by describing named entities or concrete events for an image with its news article. Existing methods have achieved remarkable results by relying on the large-scale pre-trained models, which primarily focus on the correlations between the input news content and the output predictions. However, the news captioning requires adhering to some fundamental rules of news reporting, such as accurately describing the individuals and actions associated with the event. In this paper, we propose the rule-driven news captioning method, which can generate image descriptions following designated rule signal. Specifically, we first design the news-aware semantic rule for the descriptions. This rule incorporates the primary action depicted in the image (e.g., "performing") and the roles played by named entities involved in the action (e.g., "Agent" and "Place"). Second, we inject this semantic rule into the large-scale pre-trained model, BART, with the prefix-tuning strategy, where multiple encoder layers are embedded with news-aware semantic rule. Finally, we can effectively guide BART to generate news sentences that comply with the designated rule. Extensive experiments on two widely used datasets (i.e., GoodNews and NYTimes800k) demonstrate the effectiveness of our method.