 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultimodal Large Language Models-Enabled UAV Swarm: Towards Efficient and Intelligent Autonomous Aerial Systems
Jun 15, 2025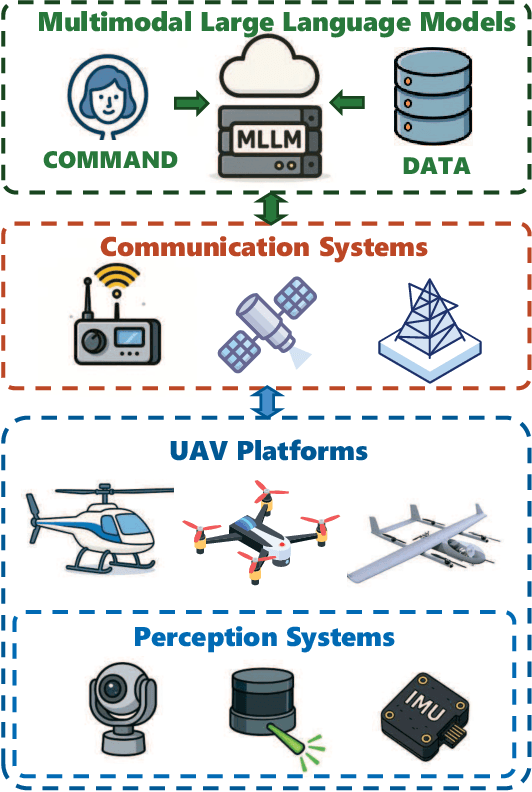
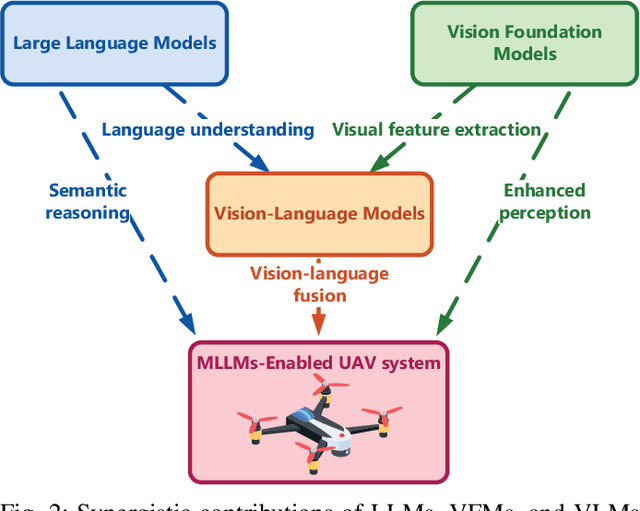
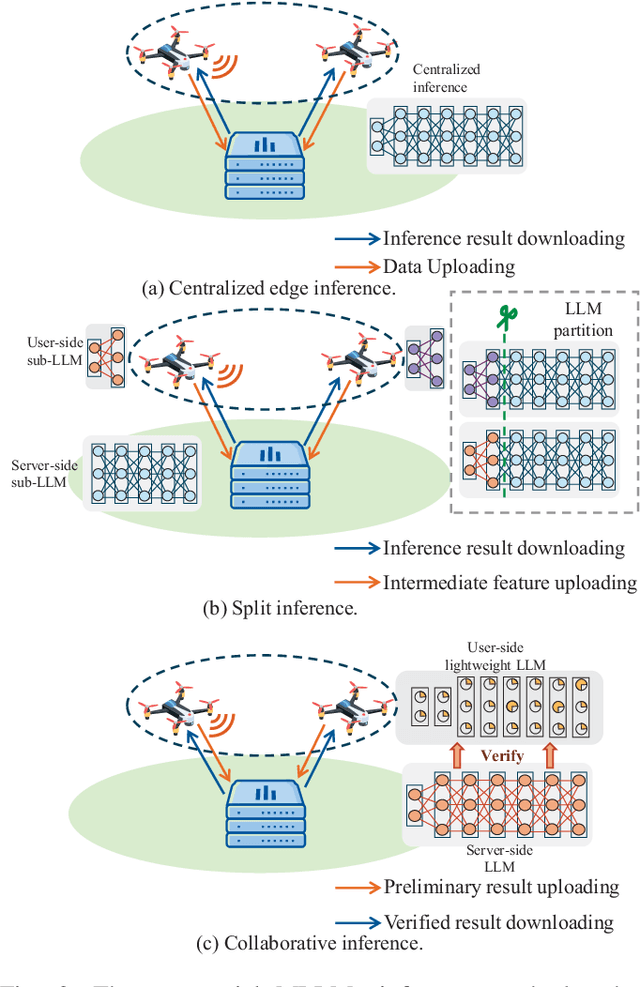
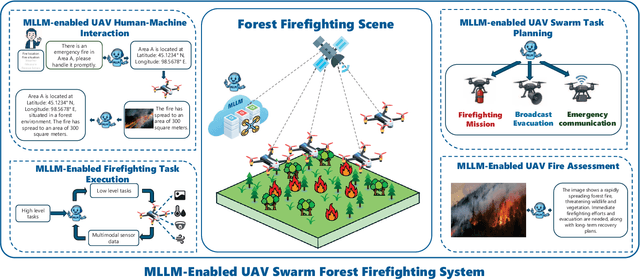
Recent breakthroughs in multimodal large language models (MLLMs) have endowed AI systems with unified perception, reasoning and natural-language interaction across text, image and video streams. Meanwhile, Unmanned Aerial Vehicle (UAV) swarms are increasingly deployed in dynamic, safety-critical missions that demand rapid situational understanding and autonomous adaptation. This paper explores potential solutions for integrating MLLMs with UAV swarms to enhance the intelligence and adaptability across diverse tasks. Specifically, we first outline the fundamental architectures and functions of UAVs and MLLMs. Then, we analyze how MLLMs can enhance the UAV system performance in terms of target detection, autonomous navigation, and multi-agent coordination, while exploring solutions for integrating MLLMs into UAV systems. Next, we propose a practical case study focused on the forest fire fighting. To fully reveal the capabilities of the proposed framework, human-machine interaction, swarm task planning, fire assessment, and task execution are investigated. Finally, we discuss the challenges and future research directions for the MLLMs-enabled UAV swarm. An experiment illustration video could be found online at https://youtu.be/zwnB9ZSa5A4.
Distributed satellite information networks: Architecture, enabling technologies, and trends
Dec 17, 2024



Driven by the vision of ubiquitous connectivity and wireless intelligence, the evolution of ultra-dense constellation-based satellite-integrated Internet is underway, now taking preliminary shape. Nevertheless, the entrenched institutional silos and limited, nonrenewable heterogeneous network resources leave current satellite systems struggling to accommodate the escalating demands of next-generation intelligent applications. In this context, the distributed satellite information networks (DSIN), exemplified by the cohesive clustered satellites system, have emerged as an innovative architecture, bridging information gaps across diverse satellite systems, such as communication, navigation, and remote sensing, and establishing a unified, open information network paradigm to support resilient space information services. This survey first provides a profound discussion about innovative network architectures of DSIN, encompassing distributed regenerative satellite network architecture, distributed satellite computing network architecture, and reconfigurable satellite formation flying, to enable flexible and scalable communication, computing and control. The DSIN faces challenges from network heterogeneity, unpredictable channel dynamics, sparse resources, and decentralized collaboration frameworks. To address these issues, a series of enabling technologies is identified, including channel modeling and estimation, cloud-native distributed MIMO cooperation, grant-free massive access, network routing, and the proper combination of all these diversity techniques. Furthermore, to heighten the overall resource efficiency, the cross-layer optimization techniques are further developed to meet upper-layer deterministic, adaptive and secure information services requirements. In addition, emerging research directions and new opportunities are highlighted on the way to achieving the DSIN vision.
Strategic Application of AIGC for UAV Trajectory Design: A Channel Knowledge Map Approach
Nov 30, 2024



Unmanned Aerial Vehicles (UAVs) are increasingly utilized in wireless communication, yet accurate channel loss prediction remains a significant challenge, limiting resource optimization performance. To address this issue, this paper leverages Artificial Intelligence Generated Content (AIGC) for the efficient construction of Channel Knowledge Maps (CKM) and UAV trajectory design. Given the time-consuming nature of channel data collection, AI techniques are employed in a Wasserstein Generative Adversarial Network (WGAN) to extract environmental features and augment the data. Experiment results demonstrate the effectiveness of the proposed framework in improving CKM construction accuracy. Moreover, integrating CKM into UAV trajectory planning reduces channel gain uncertainty, demonstrating its potential to enhance wireless communication efficiency.
STAR-RIS-Enabled Full-Duplex Integrated Sensing and Communication System
Oct 24, 2024



Traditional self-interference cancellation (SIC) methods are common in full-duplex (FD) integrated sensing and communication (ISAC) systems. However, exploring new SIC schemes is important due to the limitations of traditional approaches. With the challenging limitations of traditional SIC approaches, this paper proposes a novel simultaneous transmitting and reflecting reconfigurable intelligent surface (STAR-RIS)-enabled FD ISAC system, where STAR-RIS enhances simultaneous communication and target sensing and reduces self-interference (SI) to a level comparable to traditional SIC approaches. The optimization of maximizing the sensing signal-to-interference-plus-noise ratio (SINR) and the communication sum rate, both crucial for improving sensing accuracy and overall communication performance, presents significant challenges due to the non-convex nature of these problems. Therefore, we develop alternating optimization algorithms to iteratively tackle these problems. Specifically, we devise the semi-definite relaxation (SDR)-based algorithm for transmit beamformer design. For the reflecting and refracting coefficients design, we adopt the successive convex approximation (SCA) method and implement the SDR-based algorithm to tackle the quartic and quadratic constraints. Simulation results validate the effectiveness of the proposed algorithms and show that the proposed deployment can achieve better performance than that of the benchmark using the traditional SIC approach without STAR-RIS deployment.
Positioning Error Compensation by Channel Knowledge Map in UAV Communication Missions
Sep 24, 2024When Unmanned Aerial Vehicles (UAVs) perform high-precision communication tasks, such as searching for users and providing emergency coverage, positioning errors between base stations and users make it challenging to deploy trajectory planning algorithms. To address these challenges caused by position errors, a framework was proposed to compensate it by Channel Knowledge Map (CKM), which stores channel state information (CSI). By taking the positions with errors as input, the generated CKM could give a prediction of signal attenuation which is close to true positions. Based on that, the predictions are utilized to calculate the received power and a PPO-based algorithm is applied to optimize the compensation. After training, the framework is able to find a strategy that minimize the flight time under communication constraints and positioning error. Besides, the confidence interval is calculated to assist the allocation of power and the update of CKM is studied to adapt to the dynamic environment. Simulation results show the robustness of CKM to positioning error and environmental changes, and the superiority of CKM-assisted UAV communication design.