 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Semantic-based Agent Communication Networks: Vision, Technologies, and Challenges
Mar 25, 2026The International Telecommunication Union (ITU) identifies "Artificial Intelligence (AI) and Communication" as one of six key usage scenarios for 6G. Agentic AI, characterized by its ca-pabilities in multi-modal environmental sensing, complex task coordination, and continuous self-optimization, is anticipated to drive the evolution toward agent-based communication net-works. Semantic communication (SemCom), in turn, has emerged as a transformative paradigm that offers task-oriented efficiency, enhanced reliability in complex environments, and dynamic adaptation in resource allocation. However, comprehensive reviews that trace their technologi-cal evolution in the contexts of agent communications remain scarce. Addressing this gap, this paper systematically explores the role of semantics in agent communication networks. We first propose a novel architecture for semantic-based agent communication networks, structured into three layers, four entities, and four stages. Three wireless agent network layers define the logical structure and organization of entity interactions: the intention extraction and understanding layer, the semantic encoding and processing layer, and the distributed autonomy and collabora-tion layer. Across these layers, four AI agent entities, namely embodied agents, communication agents, network agents, and application agents, coexist and perform distinct tasks. Furthermore, four operational stages of semantic-enhanced agentic AI systems, namely perception, memory, reasoning, and action, form a cognitive cycle guiding agent behavior. Based on the proposed architecture, we provide a comprehensive review of the state-of-the-art on how semantics en-hance agent communication networks. Finally, we identify key challenges and present potential solutions to offer directional guidance for future research in this emerging field.
Inference-Optimal ISAC via Task-Oriented Feature Transmission and Power Allocation
Oct 23, 2025This work is concerned with the coordination gain in integrated sensing and communication (ISAC) systems under a compress-and-estimate (CE) framework, wherein inference performance is leveraged as the key metric. To enable tractable transceiver design and resource optimization, we characterize inference performance via an error probability bound as a monotonic function of the discriminant gain (DG). This raises the natural question of whether maximizing DG, rather than minimizing mean squared error (MSE), can yield better inference performance. Closed-form solutions for DG-optimal and MSE-optimal transceiver designs are derived, revealing water-filling-type structures and explicit sensing and communication (S\&C) tradeoff. Numerical experiments confirm that DG-optimal design achieves more power-efficient transmission, especially in the low signal-to-noise ratio (SNR) regime, by selectively allocating power to informative features and thus saving transmit power for sensing.
Confidence Based Asynchronous Integrated Communication and Localization Networks Using Pulsed UWB Signals
Mar 02, 2025



In recent years, UWB has garnered widespread attention in academia and industry due to its low power consumption, wide bandwidth, and high time resolution characteristics. This paper introduces the design of an asynchronous IR-UWB integrated communication and localization (ICL) downlink network, which employs unified waveforms to enable simultaneous data transmission and localization. A differential sequential detection strategy has been proposed for data demodulation. To address errors caused by symbol misalignment, a novel symbol confidence metric model is introduced to ensure reliable pulse detection and time-of-arrival (TOA) estimation. Additionally, an asynchronous start-of-frame delimiter (SFD) detection model has been constructed to guide parameter optimization for practical applications. Furthermore, the clock drift estimation has been improved by leveraging the confidence metric within a modified weighted least squares (MWLS) framework. Simulation results demonstrate that the proposed system achieves reliable clock drift estimation, communication, and self-localization simultaneously. The operational range of the confidence metric required for these outcomes is also quantified, providing valuable insights for parameter design and system implementation. Finally, the agent localization accuracy can be achieved within 10 cm at over 90\% confidence, with commercial UWB devices according to practical measurements.
Energy-Efficient SLAM via Joint Design of Sensing, Communication, and Exploration Speed
Dec 18, 2024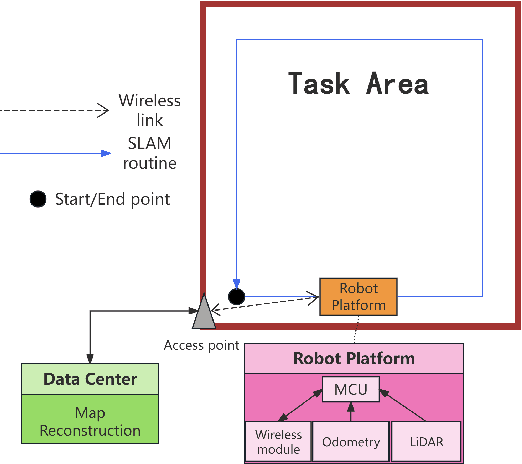
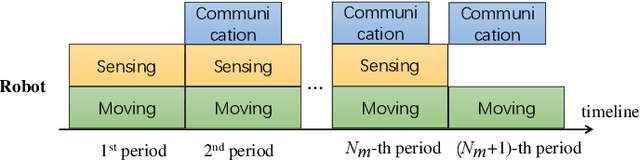
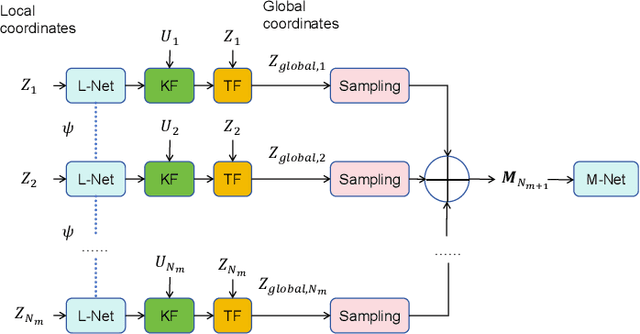
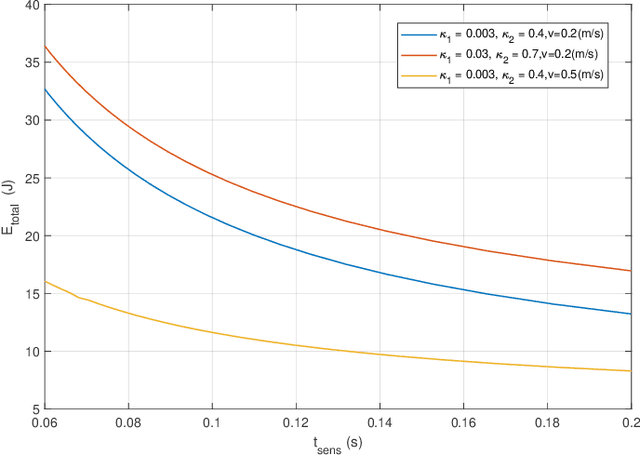
To support future spatial machine intelligence applications, lifelong simultaneous localization and mapping (SLAM) has drawn significant attentions. SLAM is usually realized based on various types of mobile robots performing simultaneous and continuous sensing and communication. This paper focuses on analyzing the energy efficiency of robot operation for lifelong SLAM by jointly considering sensing, communication and mechanical factors. The system model is built based on a robot equipped with a 2D light detection and ranging (LiDAR) and an odometry. The cloud point raw data as well as the odometry data are wirelessly transmitted to data center where real-time map reconstruction is realized based on an unsupervised deep learning based method. The sensing duration, transmit power, transmit duration and exploration speed are jointly optimized to minimize the energy consumption. Simulations and experiments demonstrate the performance of our proposed method.
Distributed satellite information networks: Architecture, enabling technologies, and trends
Dec 17, 2024



Driven by the vision of ubiquitous connectivity and wireless intelligence, the evolution of ultra-dense constellation-based satellite-integrated Internet is underway, now taking preliminary shape. Nevertheless, the entrenched institutional silos and limited, nonrenewable heterogeneous network resources leave current satellite systems struggling to accommodate the escalating demands of next-generation intelligent applications. In this context, the distributed satellite information networks (DSIN), exemplified by the cohesive clustered satellites system, have emerged as an innovative architecture, bridging information gaps across diverse satellite systems, such as communication, navigation, and remote sensing, and establishing a unified, open information network paradigm to support resilient space information services. This survey first provides a profound discussion about innovative network architectures of DSIN, encompassing distributed regenerative satellite network architecture, distributed satellite computing network architecture, and reconfigurable satellite formation flying, to enable flexible and scalable communication, computing and control. The DSIN faces challenges from network heterogeneity, unpredictable channel dynamics, sparse resources, and decentralized collaboration frameworks. To address these issues, a series of enabling technologies is identified, including channel modeling and estimation, cloud-native distributed MIMO cooperation, grant-free massive access, network routing, and the proper combination of all these diversity techniques. Furthermore, to heighten the overall resource efficiency, the cross-layer optimization techniques are further developed to meet upper-layer deterministic, adaptive and secure information services requirements. In addition, emerging research directions and new opportunities are highlighted on the way to achieving the DSIN vision.
Robust Deep Joint Source-Channel Coding Enabled Distributed Image Transmission with Imperfect Channel State Information
Nov 19, 2024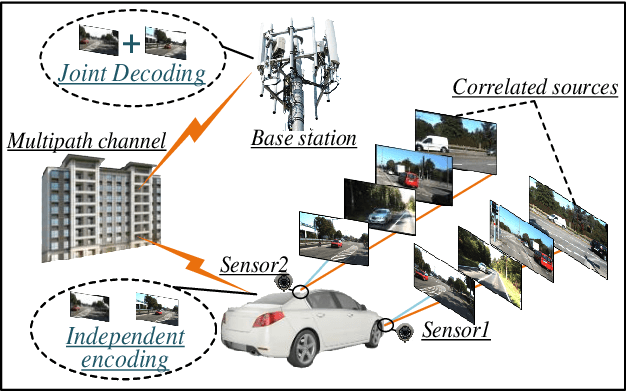
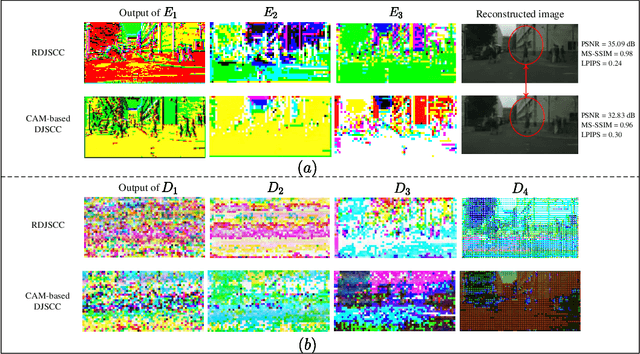
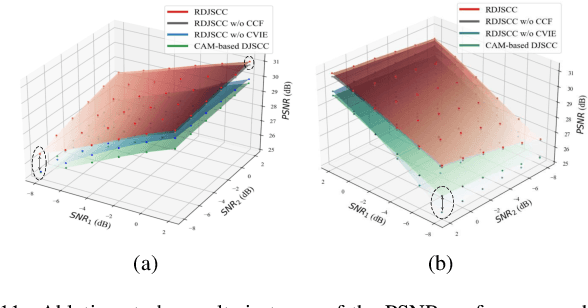
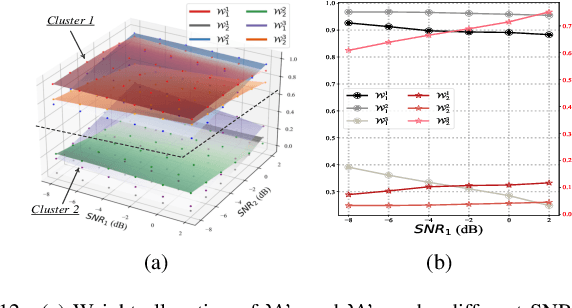
This work is concerned with robust distributed multi-view image transmission over a severe fading channel with imperfect channel state information (CSI), wherein the sources are slightly correlated. Since the signals are further distorted at the decoder, traditional distributed deep joint source-channel coding (DJSCC) suffers considerable performance degradation. To tackle this problem, we leverage the complementarity and consistency characteristics among the distributed, yet correlated sources, and propose an enhanced robust DJSCC, namely RDJSCC. In RDJSCC, we design a novel cross-view information extraction (CVIE) mechanism to capture more nuanced cross-view patterns and dependencies. In addition, a complementarity-consistency fusion (CCF) mechanism is utilized to fuse the complementarity and consistency from multi-view information in a symmetric and compact manner. Theoretical analysis and simulation results show that our proposed RDJSCC can effectively leverage the advantages of correlated sources even under severe fading conditions, leading to an improved reconstruction performance. The open source code of this work is available at:https://dongbiao26.github.io/rdjscc/.
Fundamental Limits of Pulse Based UWB ISAC Systems: A Parameter Estimation Perspective
Oct 17, 2024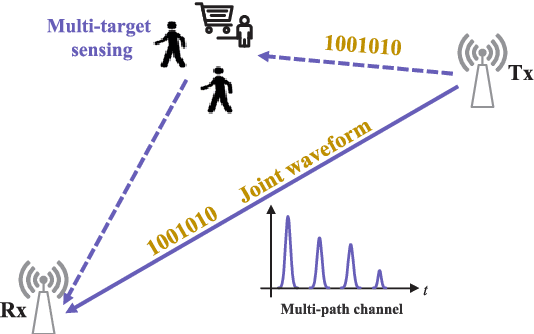
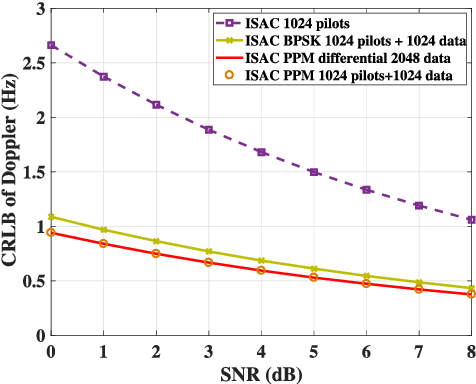
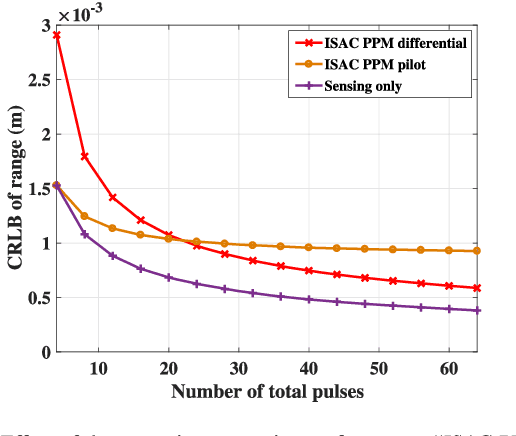
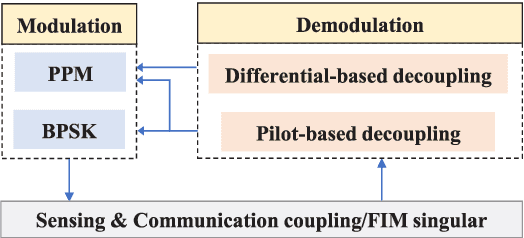
Impulse radio ultra-wideband (IR-UWB) signals stand out for their high temporal resolution, low cost, and large bandwidth, making them a highly promising option for integrated sensing and communication (ISAC) systems. In this paper, we design an ISAC system for a bi-static passive sensing scenario that accommodates multiple targets. Specifically, we introduce two typical modulation schemes, PPM and BPSK, for data transmission. The essential coupling between sensing and communication is examined through the Fisher information matrix (FIM). Accordingly, we introduce a pilot-based decoupling approach that relies on known time-delays, as well as a differential decoupling strategy that uses a known starting symbol position. Finally, we assess the sensing and communication performance under various modulation and demodulation schemes under the constraints of current UWB standards. This assessment utilizes the Cramer-Rao Lower Bound (CRLB) for sensing and the Shannon capacity limit for communication, offering theoretical insights into choosing suitable data signal processing methods in real-world applications.
Automatic Radio Map Adaptation for Robust Localization with Dynamic Adversarial Learning
Feb 19, 2024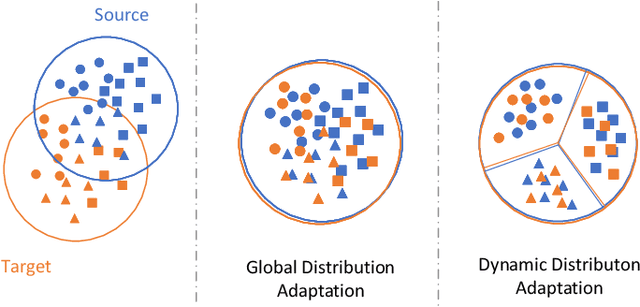
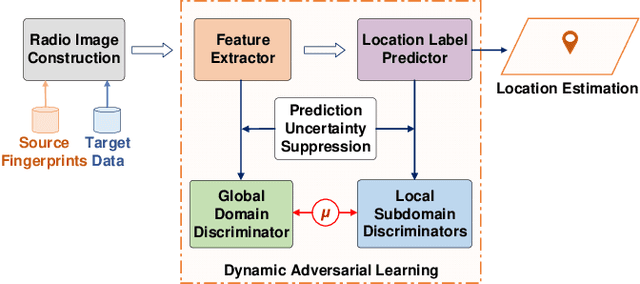
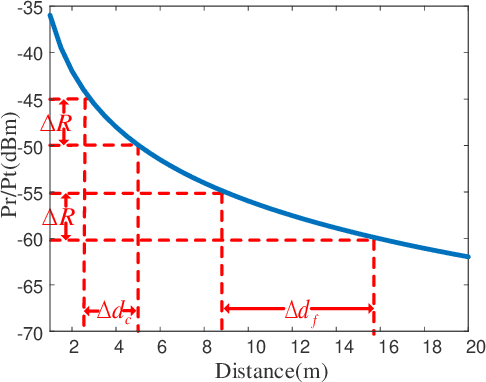
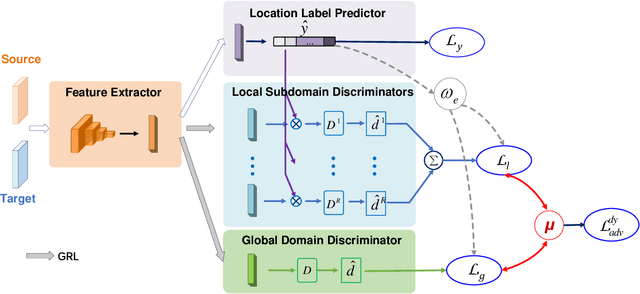
Wireless fingerprint-based localization has become one of the most promising technologies for ubiquitous location-aware computing and intelligent location-based services. However, due to RF vulnerability to environmental dynamics over time, continuous radio map updates are time-consuming and infeasible, resulting in severe accuracy degradation. To address this issue, we propose a novel approach of robust localization with dynamic adversarial learning, known as DadLoc which realizes automatic radio map adaptation by incorporating multiple robust factors underlying RF fingerprints to learn the evolving feature representation with the complicated environmental dynamics. DadLoc performs a finer-grained distribution adaptation with the developed dynamic adversarial adaptation network and quantifies the contributions of both global and local distribution adaptation in a dynamics-adaptive manner. Furthermore, we adopt the strategy of prediction uncertainty suppression to conduct source-supervised training, target-unsupervised training, and source-target dynamic adversarial adaptation which can trade off the environment adaptability and the location discriminability of the learned deep representation for safe and effective feature transfer across different environments. With extensive experimental results, the satisfactory accuracy over other comparative schemes demonstrates that the proposed DanLoc can facilitate fingerprint-based localization for wide deployments.
Secure ISAC MIMO Systems: Exploiting Interference With Bayesian Cramér-Rao Bound Optimization
Jan 30, 2024In this paper, we present a signaling design for secure integrated sensing and communication (ISAC) systems comprising a dual-functional multi-input multi-output (MIMO) base station (BS) that simultaneously communicates with multiple users while detecting targets present in their vicinity, which are regarded as potential eavesdroppers. In particular, assuming that the distribution of each parameter to be estimated is known \textit{a priori}, we focus on optimizing the targets' sensing performance. To this end, we derive and minimize the Bayesian Cram\'er-Rao bound (BCRB), while ensuring certain communication quality of service (QoS) by exploiting constructive interference (CI). The latter scheme enforces that the received signals at the eavesdropping targets fall into the destructive region of the signal constellation, to deteriorate their decoding probability, thus enhancing the ISAC's system physical-layer security (PLS) capability. To tackle the nonconvexity of the formulated problem, a tailored successive convex approximation method is proposed for its efficient solution. Our extensive numerical results verify the effectiveness of the proposed secure ISAC design showing that the proposed algorithm outperforms block-level precoding techniques.
A Tightly Coupled Bi-Level Coordination Framework for CAVs at Road Intersections
Feb 07, 2023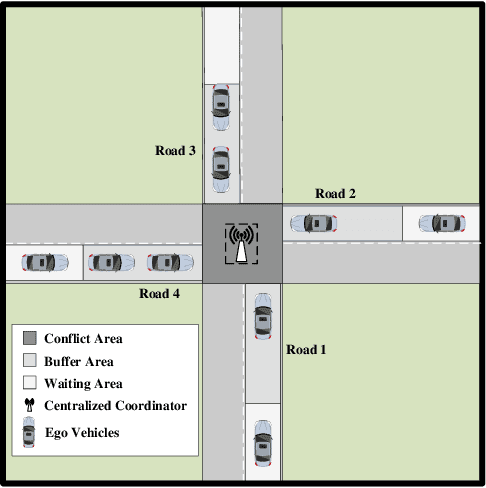
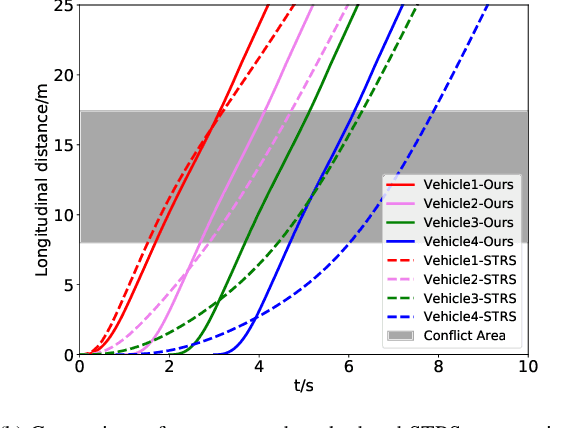
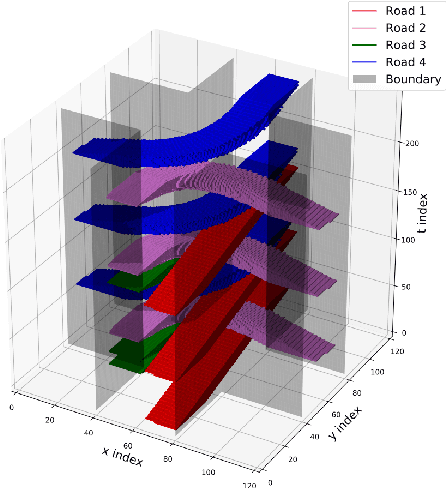
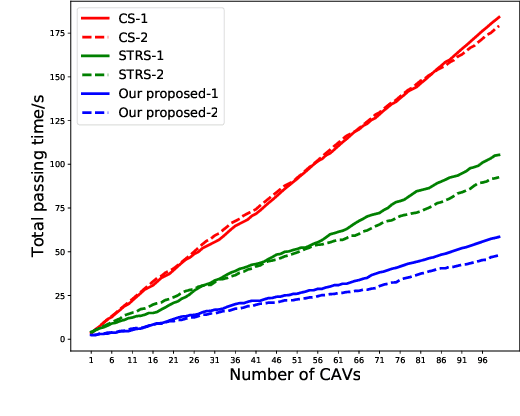
Since the traffic administration at road intersections determines the capacity bottleneck of modern transportation systems, intelligent cooperative coordination for connected autonomous vehicles (CAVs) has shown to be an effective solution. In this paper, we try to formulate a Bi-Level CAV intersection coordination framework, where coordinators from High and Low levels are tightly coupled. In the High-Level coordinator where vehicles from multiple roads are involved, we take various metrics including throughput, safety, fairness and comfort into consideration. Motivated by the time consuming space-time resource allocation framework in [1], we try to give a low complexity solution by transforming the complicated original problem into a sequential linear programming one. Based on the "feasible tunnels" (FT) generated from the High-Level coordinator, we then propose a rapid gradient-based trajectory optimization strategy in the Low-Level planner, to effectively avoid collisions beyond High-level considerations, such as the pedestrian or bicycles. Simulation results and laboratory experiments show that our proposed method outperforms existing strategies. Moreover, the most impressive advantage is that the proposed strategy can plan vehicle trajectory in milliseconds, which is promising in realworld deployments. A detailed description include the coordination framework and experiment demo could be found at the supplement materials, or online at https://youtu.be/MuhjhKfNIOg.